多致动器轴承预紧力加载控制仿真
2022-10-03陈云鹏马喜强李济顺李明岩
陈云鹏,杨 芳,2*,马喜强,李济顺,2,李明岩
(1.河南科技大学 机电工程学院,洛阳 471003;2.河南科技大学 河南省机械设计及传动系统重点实验室,洛阳 471003)
0 引言
机床主轴轴承作为主轴工作中的重要部分,其性能很大程度上影响机床整体工作效果[1]。随着机床加工精度要求的不断提升,机床主轴轴承则需要在各种工况下,保证精度的同时保持高性能运行。传统的轴承性能试验是根据不同轴承的结构特点,以力学、振动、接触等性能测试为主[2]。但实际工程应用中机床主轴轴承所承受的轴向预紧力,尤其是变载荷运行时,与传统性能试验中的要求存在一定差距。因此需根据轴承实际工况的施加高精度的轴向预紧力,从而使轴承试验最大程度的还原服役状态下轴承的受力情况,实现对实际工况的模拟。
对于轴承预紧力的实施方式主要有:定量预紧、可调预紧、可变预紧[3]。轴承预紧力作为对轴承性能产生重要影响的因素,随着预紧力的变化,轴承的刚度也会随之变化,在保证轴承刚度的情况下,轴承的最佳预紧力在不同转速情况下也会发生一定变化[4],适当的预紧力对主轴的回转性能也会产生一定影响[5]。由此可见,可调预紧力可以有效的提高轴承和主轴工作性能。本文所选用H7006C轴承预紧力范围为:180N~220N,载荷较小,通过液压加载[6]的方式难以实现精确可调加载。电磁加载技术对小载荷的施加可以达到很好的效果,但传统的电磁加载[7]与压电陶瓷加载[8]由于磁化以及不适用于长时间工作加载,不能产生很好的效果。基于Kim[9]所提出的一种磁致伸缩预紧机构,为减小部件的热膨胀现象,采用多个致动器对试验轴承施加载荷,使得每个致动器的输入电压减小,有效减小每个致动器所产生的欧姆热,同时每个致动器直接与轴承内(外)圈相抵接,减小了机构的复杂程度。
本文基于多个致动器沿周向均匀的分布,实现多种载荷加载。各致动器上配有力传感器,对输出力值进行监测及反馈形成闭环。基于偏差耦合控制结构,通过模糊PID完成对结构内的各通道输出力的控制,利用基于扩张状态观测器(extended state observer,ESO)的比例-积分控制器对对产生的同步误差进行实时观测与处理,将处理过的同步误差补偿到通道中,完成同步误差补偿。仿真结果表明轴向预紧力加载机构可以实现对轴向力的精确可调加载。
1 多致动器力输出模型
本文以致动器作为执行机构,如图1所示为致动器的结构示意图[10]。该装置通过输入电流生成驱动磁场,利用磁致伸缩效应,使磁致伸缩材料(Giant Magnetostrictive Material,GMM)[11]产生形变,从而对被驱动物体产生位移,实现力的输出。
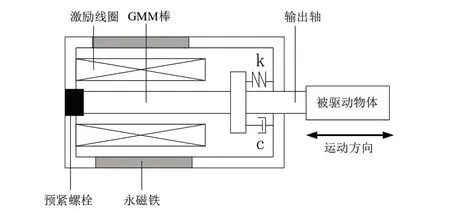
图1 致动器结构示意图
根据文献[12]中的动力学模型建立方法将致动器的动力学过程进行简化,进而得到等效单自由度的力学模型,如图2所示,其中各项参数如表1所示。
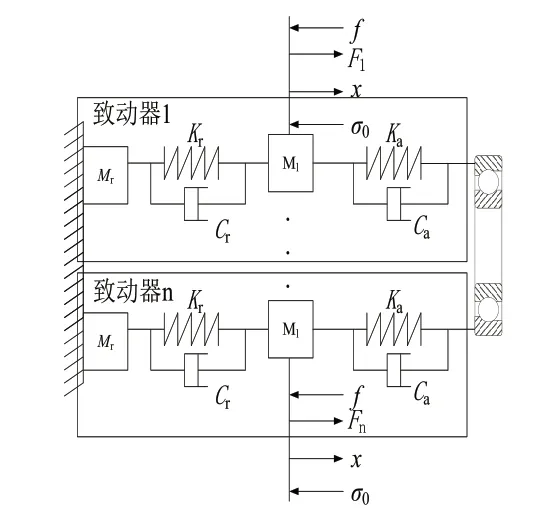
图2 多致动器等效力学模型
考虑温度、应力、伸缩棒的质量、阻尼以及磁场引起的磁滞非线性的影响下,基于伸缩棒特性的非线性压磁方程式为:

式中ε为伸缩棒长度方向总应变量;EH为伸缩棒的杨氏模量;σ为应力;λ为各向同行材料的磁致伸缩;CD为内部阻尼系数;ρ为质量密度;lr为棒长度。
在整个磁致伸缩运动过程中,负载对伸缩棒的作用力为:

同时伸缩棒一直受到预压力σ0作用,考虑伸缩棒的质量与阻尼,且根据牛顿第二定律,伸缩棒的输出力Fi=-(Fa+σ0Ar)即:

由应变ε=x/lr、式(1)与式(3)联立可得致动器的动力学方程为:
对通过拉氏变换,将式(4)变换为致动器的位移传递函数:

式(6)中,s为算子,X(s)、I(s)分别为位移与电流。
位移驱动负载,则输出力与位移之间得传递函数为:

所以单个致动器的输出力与输入电流之间的传递函数为:

根据图2所示,轴承外圈所受预紧力F为各致动器输出力之和,同时选用致动器型号相同,即:

式(9)中,n表示致动器个数。
2 预紧力控制方法
2.1 控制系统结构
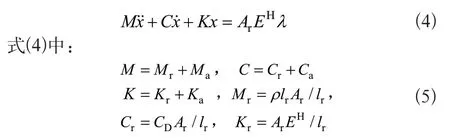
本文选用三个致动器作为执行机构,为保证控制精度,所以采用如图3、4所示的偏差耦合控制结构[13],该结构主要由多致动器系统、同步误差补偿器以及力控制器组成。力控制器选用模糊PID控制器,在各通道对致动器进行控制,并形成电流-力闭环系统,提高系统的控制精度;同步误差补偿器收集各通道输出力与输出力平均值的差,通过基于ESO的比例-积分处理后的值传递到通道内,实现对同步误差的补偿;多致动器系统每个致动器都选用相同型号,即每个致动器的传递函数相同。
图3 预紧力控制系统结构
2.2 同步误差补偿器设计
设加载系统的三个致动器分别为H1、H2、H3,每个致动器输出力与平均输出力的差为fe,则根据同步控制方案,轴向预紧力加载系统的动态模型为:
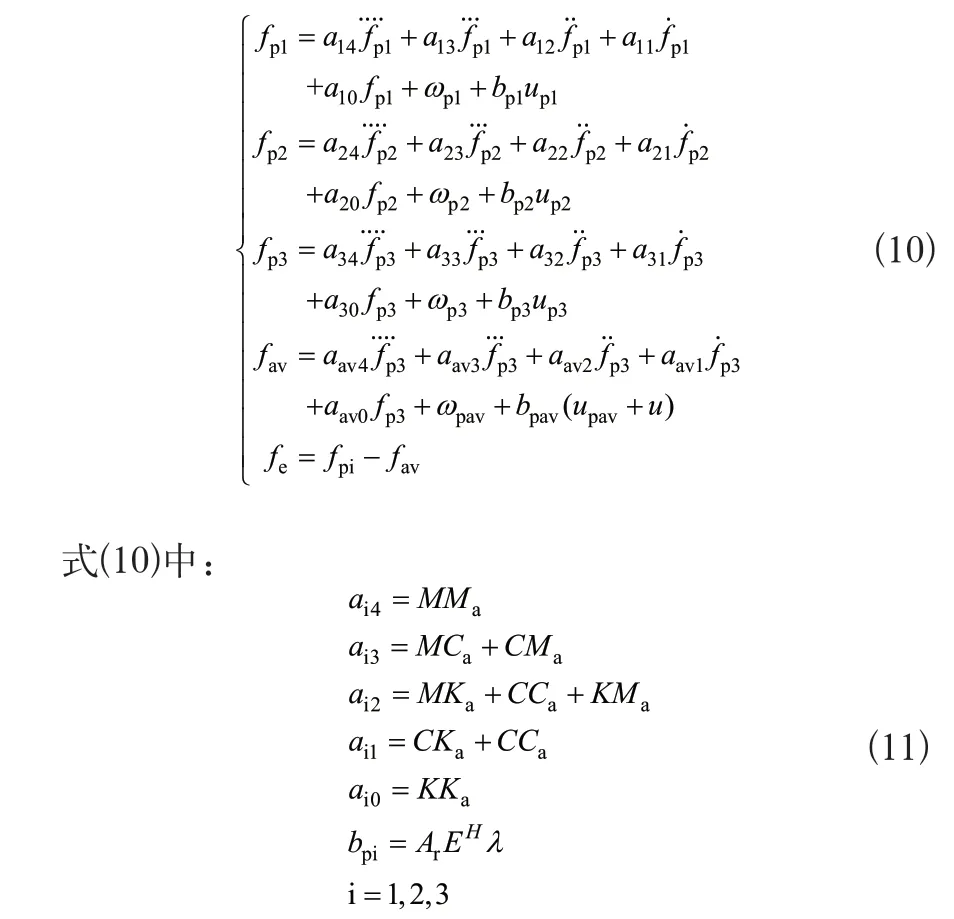
式(11)中:ωpi分别为各子系统的外部扰动,将上式中的力同步误差模型进行转化,得到二阶模型:

式(12)中:F(·)=(ypi,ypav,upi,upav,)为系统的内、外部未知总扰动的函数,ypi、ypav分别为各系统输出平均值关于内、外部扰动的函数,b0为可调参数。
假设F(·)可微,令,则对系统的状态方程的描述如下:
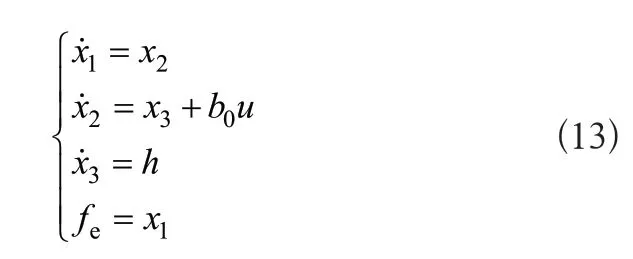
式(13)中u为控制器产生的系统控制量。
针对式(11)所述系统设计ESO[14]:
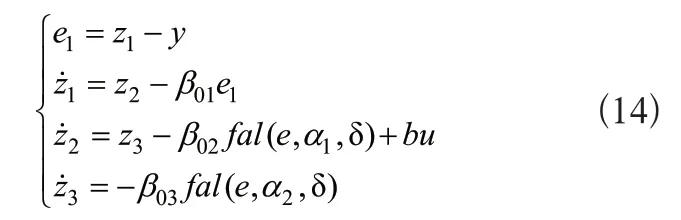
式(14)中:z1、z2、z3分别为系统状态1、x2、x3的观测值;通过适当的观测器的增益参数β01、β02、β03,实现对系统状态的实时跟踪;α1、α2分别取1/2、1/4;通过函数fal对信号的抖动进行抑制,函数具体如式(15)所示:
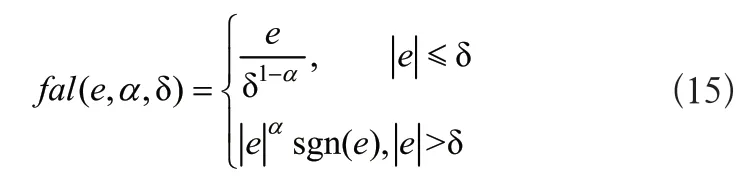
式(15)中δ>0且代表区间长度。观测误差e对函数fla产生增益的大小有较大影响,e的值越大函数产生增益变小,反之越高。
可得基于扩张观测器的同步误差控制规律为:
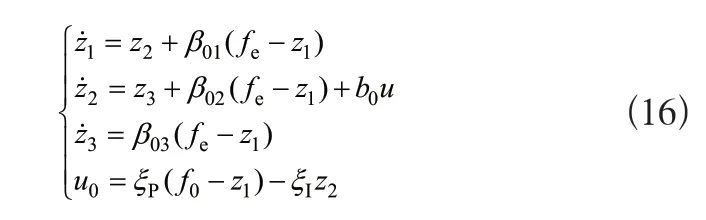
式(16)中ξP、ξI为控制器所需参数,f0为同步误差的参考输入。
2.3 控制器设计
本文采用模糊PID控制,控制器结构如图4所示。系统输入为误差E与误差的变化率EC,输出为PID参数KP、KI、KD。
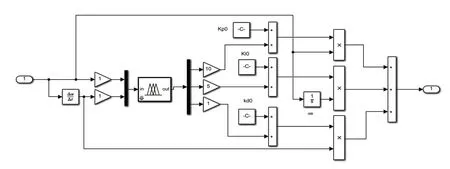
图4 模糊PID框图
设输入E与EC的论域均为(-3,3),输出各参数的论域均为(-60,60),各变量隶属度函数如图6所示。规定E与EC的模糊集为{NB,NM,NS,ZO,PS,PM,PB},则参数KP、KI、KD的模糊集为{NB,NM,NS,ZO,PS,PM,PB},三个参数的模糊规则如表1~表3所示。
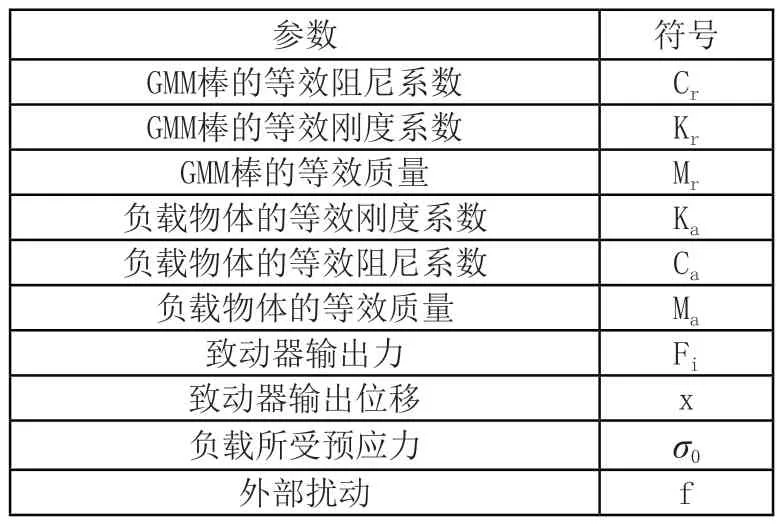
表1 等效模型各项参数
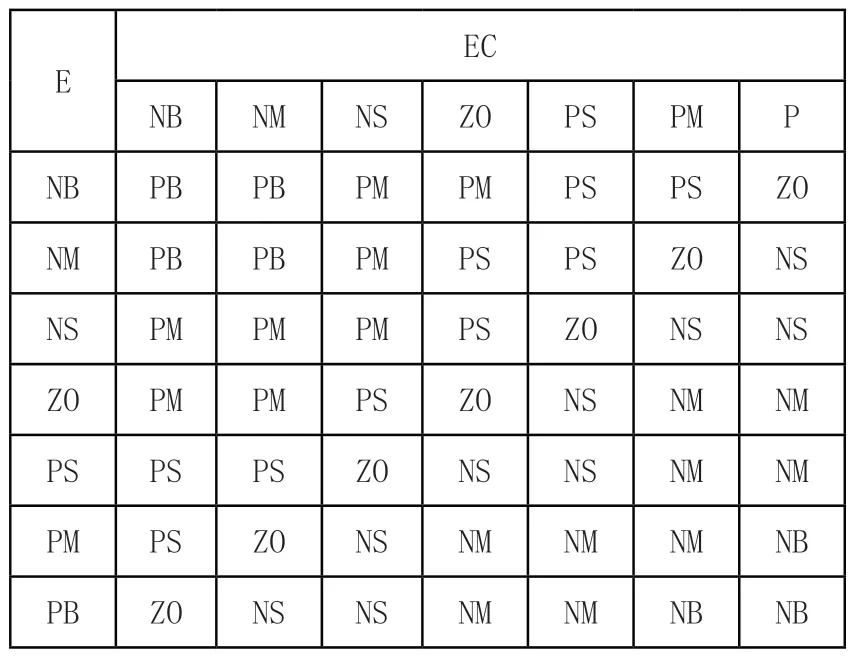
表2 KP模糊规则
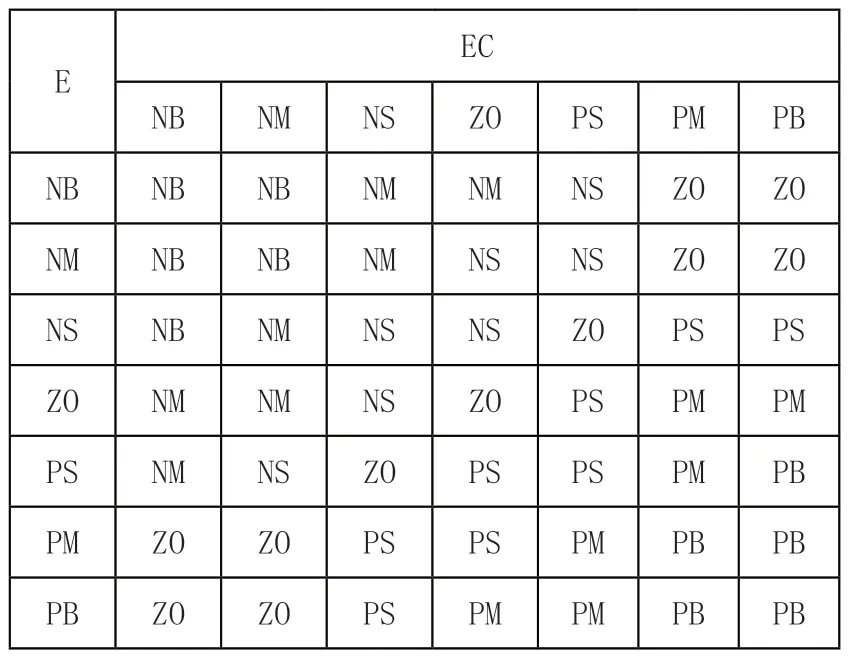
表3 KI模糊规则
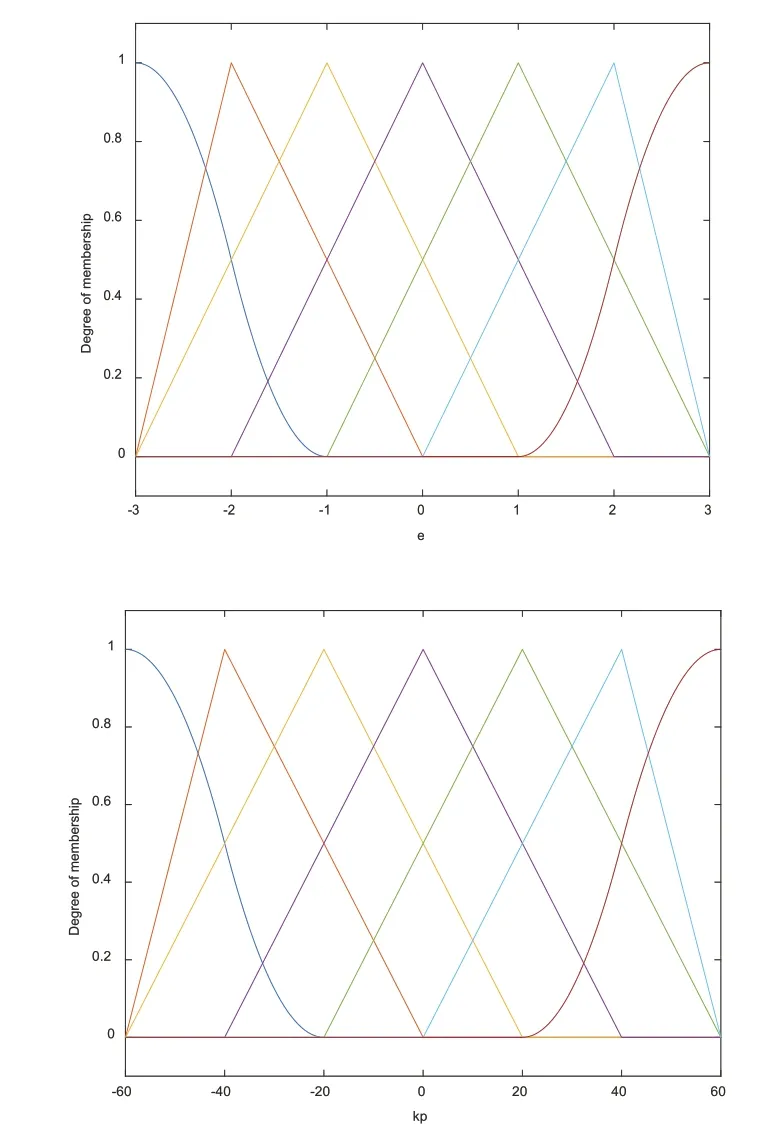
图5 各变量隶属度函数
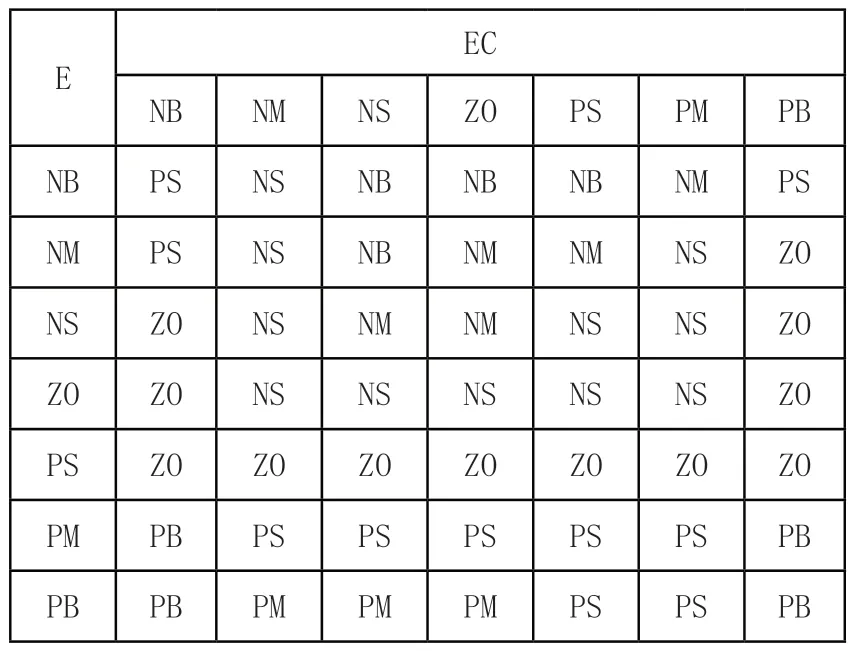
表4 KD模糊规则
3 仿真分析
通过MATLAB/Simulink环境中搭建模型,验证控制方案的有效性。致动器模型的相关参数[15]如表1所示,对式(8)的传递函数进行计算。
试验要求载荷在180N~300N之间,响应时间不超过1s,控制精度±10%。为验证所采用的扩张观测器及模糊PID控制器效果,分别将ESO与模糊PID逐个取出,并与原模型进行对比。上述扩张观测器的仿真参数设计为β1=30,β2=300,β3=1000,δ=0.01,b0=150;模糊PID中KP、KI、KD三个参数分别设定为41000、387468及1047;同步误差补偿器中的PI控制器参数与子系统中模糊PID的参数存在一定比例关系,分别为HP×KP及HI×KI。为模拟实际工作情况,根据角接触轴承的振动特性及实际工作中的不确定性[16],在模型中加入适当频率、大小的白噪声对未知干扰进行模拟。
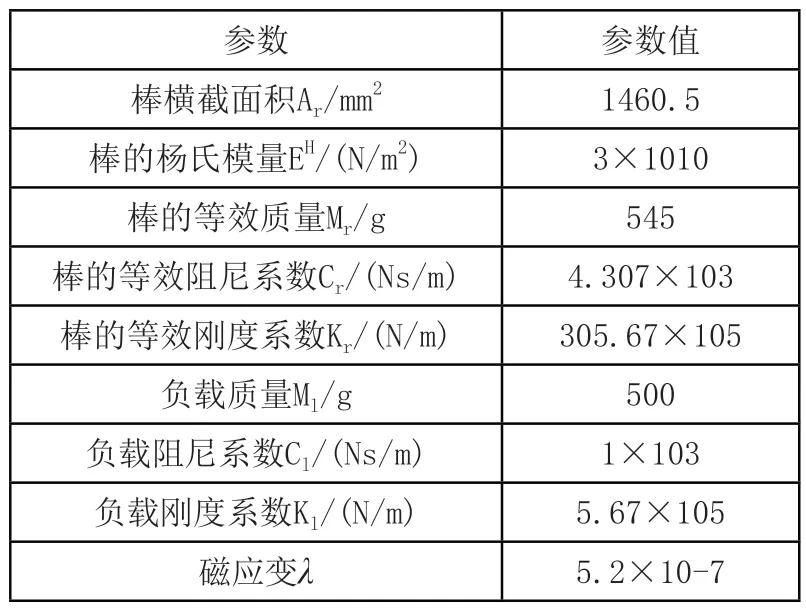
表5 模型相关参数
依照载荷要求范围,选取180N进行静力加载仿真,并与传统PID偏差耦合进行对比,仿真结果如图6所示。
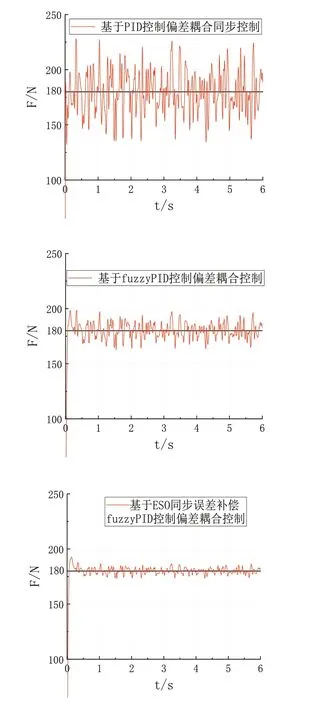
图6 设定180N时三种控制方法对比
图6中,轴向加载力目标值为180N,通过基于传统PID控制器的偏差耦合、基于模糊PID的偏差耦合与本文所采用的基于ESO同步误差补偿器模糊PID控制器的偏差耦合进行对比,可以明显看出本文所用方法在进入稳态之后,在相同白噪声的影响下,稳定性明显优于其他两种方法。将所获得数据通过处理得到三种控制方法的均方根误差分别为42.69277、26.43721及22.46,可知本文所采用控制方法的离散程度更小。由此可见本文所采用控制方法在静态加载中可以满足加载需求。
由于本系统采用三个致动器,在每台致动器上分别施加大小不同的白噪声作为扰动信号,将第2、3台致动器的输出力值进行对比,可以得到第2、3台致动器之间的同步误差。在三种控制结构上的每个通道加载相同的扰动,可以得到如图7所示同步误差对比,显然,本文所采用的方法的同步误差更小、调整速度更快,可见本文所采用控制方法可以等好的减小同步误差,保持多个执行机构的之间的同步性能。
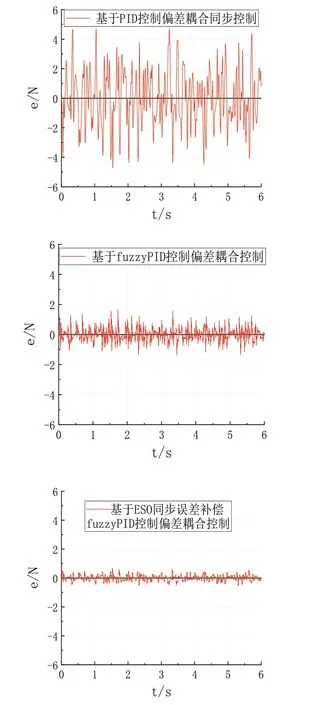
图7 设定值为180N时三种方法第2、3台致动器同步误差
如图8所示,同步误差补偿器中的HP、HI对系统的同步误差峰值及调整时间有着较大影响,各子系统之间的最大同步误差随着HP、HI增大而减小,但是相应的调节时间却随着HP的提高而增大,由图可知当HP/HI为某一较小比值时,即HP=4,HI=1.5时效果较为优异。
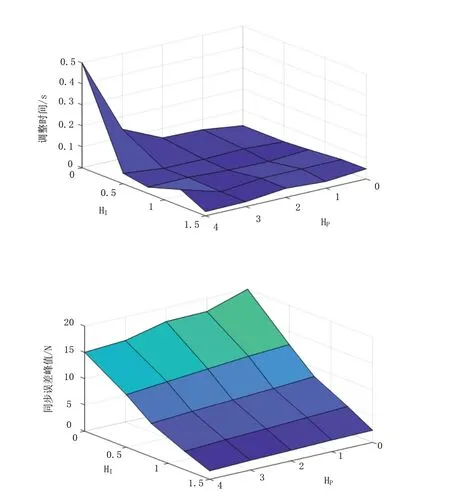
图8 HP、HI对同步效果的影响
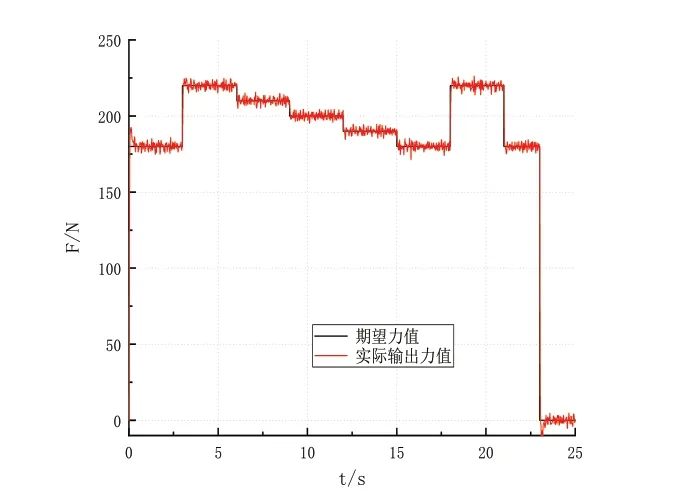
图9 动态加载仿真
轴承在试验过程中需要按照选定的载荷谱进行动态试验,选取载荷谱中的一部分进行轴向预紧力加载装置的仿真试验,仿真结果如图10所示。可以看出相对于静态加载在动态加载过程中,轴向力的超调量会变大,在稳定状态下的震荡幅度与静态加载时相同,始终保持在允许振荡范围内,可以看出轴向预紧力加载控制效果良好。
4 结语
针对机床主轴轴承性能试验中对预紧力的小载荷、高精度需求,利用多个致动器制定了力控制器,形成以下结论:
1)各子系统内通过模糊PID控制,使PID参数发生改变,显著的减小了系统的响应时间与超调量。
2)在同步误差补偿器中,通过基于ESO的PI控制器对同步误差进行处理,减小各子系统之间的同步误差,提高了各致动器之间的同步性能。
3)根据仿真结果,利用白噪声对轴承工作状态的未知扰动进行模拟,对预紧力控制精度产生了影响,但依旧满足被控对象的高精度要求。
