一种木地板自动铺设装置的设计
2022-09-26刘国浩
岳 浩 刘国浩
(聊城大学东昌学院,山东聊城 252000)
0 引言
如今买房后家庭装修免不了要铺地板,因为木地板具有减少噪声、稳定耐用、温暖柔和、有弹性等优点,并且绿色环保、节约资源,客厅、卧室等主要活动或居住场所,无论从习惯还是健康等方面考虑,都会选择铺设木地板。现阶段,在房屋装修时,大多是采用人工方式,工人劳动强度大,所需施工周期长,并且存在一定的健康风险,尤其是在装修面积比较大的房屋时,更是大大增加了工人的患病率。在了解市场需求后设计了一种木地板自动铺设装置,该装置具有高效率、高精度的优点,既能有效降低工人的劳动强度,又能减少装修成本。
1 木地板自动铺设装置的工作原理
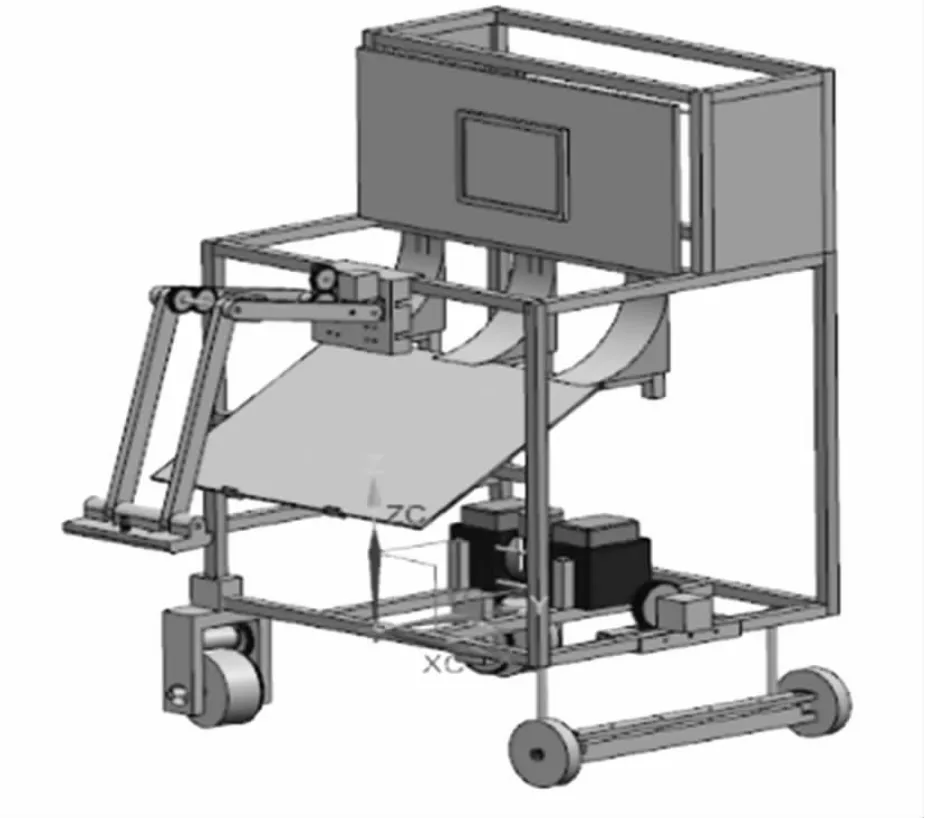
木地板自动铺设装置包括底座四个移动的车轮、丝杠步进电机、舵机、推板、机械手臂、储板箱、滑轨、挡块、吸附装置、PLC触摸屏等。
本文研究的木地板自动铺设装置结构组成如图1所示,其工作原理如下:首先选好所要铺设的实木木地板,然后放到储板箱中,再把木地板自动铺设装置放到起始位置。打开PLC触控面板,确定好路线,然后PLC控制面板会给驱动系统发送指令,使舵机转动从而使底座的动力轮带动木地板自动铺设装置保持与木地板平行水平前进,同时储板箱中的丝杠步进电机运动,使推板推动一块木地板滑下,停在挡块的位置,这时机械臂会移动到木地板上,吸附装置吸紧木地板,通过机械臂上的红外定位装置定位到上一个木地板的边缘,机械臂上的步进电机运动,使机械臂连接上一个木地板继续铺设。在接近墙壁时,木地板自动铺设装置上有距离传感器测定木地板铺设装置到墙壁的距离,当测定距离小于放置到储板箱里的木地板的长度时,木地板铺设装置会停止铺设,同时动力轮上的舵机反转使木地板铺设装置倒退一段距离,转向轮运动使木地板铺设装置转向,从而避免撞向墙壁,然后木地板铺设装置向与铺设方向垂直的方向移动一个木地板的宽度,再回到初始位置继续进行作业。木地板自动铺设装置利用红外定位装置、机械臂、距离传感器和PLC控制系统配合来完成木地板的定位、铺设、紧固等工作。

2 木地板自动铺设装置的关键部件设计
2.1 线路及气泵管的连接
根据木地板自动铺设装置的工作原理,再结合实际的工作需求,要想使机械臂灵活,要求机械手臂必须有足够的动力和吸附力。在拼装木地板自动铺设装置时,根据其要求选取步进电机和吸附装置。在铺设过程中,气泵管和线路的连接和长度是需要考虑的问题,线路敷设和气泵管连接的合理性是安全施工的一个重要保证。根据木地板自动铺设装置的高度和机械臂的伸缩长度,确定机械臂上的电线和气泵管的长度不超过2 m。
2.2 储板箱的设计
根据市场上已有木地板的大小,设计的储板箱尺寸为600 mm×200 mm×280 mm,可以放置多种类型、大小为150 mm×450 mm左右的木地板。在木地板自动铺设装置启动前,在储板箱内斜放木地板12个。在木地板自动铺设装置启动后,推板上的步进电机转动带动丝杠转动,从而使推板向前运动,使其推动木板滑动从储板箱出口滑出,通过滑轨滑动到挡块的位置停下,等待机械臂的吸附。
2.3 机械臂的设计
在现代化机械产品结构设计中,高精密、轻量化、稳定性是十分重要的设计需求。机械臂作为工程机械设施的关键部件,改善其动态特性,满足个性化需求,能有效提高工程机械的质量、工作效率及安全性。机械臂由两部分组成,即大、小两个臂部,大臂长度为420 mm,小臂长度为280 mm,由步进电机、齿轮、光杠和联轴器组成。
步进电机常常用于驱动执行机构按指定的方向和设定的角度转动或者完成既定的线位移,响应速度快,定位精确,广泛应用于机器人驱动、现代测量、机械加工、激光加工、自动焊接等领域的自动控制系统,所以在机械臂的设计过程中选用步进电机作为动力元件。
在机械产品结构中,齿轮传动是机械传动中应用最广的一种传动形式,因此齿轮作为机械范畴内极为核心的元部件,在机械设计与机械设施作业阶段普遍使用,它的传动比较准确,效率高,结构紧凑,工作可靠,寿命长,所以选用齿轮传动来带动机械臂的运作。机械臂主要完成的任务是吸附挡块处的木板,然后由机械臂上的步进电机带动齿轮旋转,从而使机械臂实现上下运动和定位,进而把吸附的木板放置到地面上,在放置到地面之前会有红外定位装置实现木板的定位,从而使木板准确地放置到指定位置。机械臂结构如图2所示。

2.4 底座结构
底座四个车轮包括两个固定的动力轮和两个控制方向的转向轮,主要用于木地板自动铺设装置的固定、前后移动以及左右转向。木地板自动铺设装置通过动力轮中舵机的正反转提供前进或后退的动力,实现前进或后退两个方向的运动,且转向轮上的舵机带动齿轮转动,使齿条发生移动,从而使装置发生转向。底座架上安装有气泵,同时有型钢将气泵固定在指定位置。
3 控制系统
选择西门子S7-1200作为控制系统,因为在位置控制方面,PLC技术的应用可以确保位置的精准性与工作效率,大大降低位置偏差发生的概率。而且与传统控制技术相比较,PLC技术具有可靠性高、实用性强、编程简单、学习难度低等优点。编程软件用的是博图软件,通过编程软件编写控制程序,Q0.0、Q0.1为步进电机的输出连接,通过控制步进电机的运动来控制机械臂前后以及上下运动;Q0.2、Q0.3控制两个电气阀,通过控制电气阀的开关来控制机械臂吸附木地板与放下木地板;通过总线控制4个舵机来控制动力轮的前后运动、转向轮的左右转向和推板的运动。I0.0接通的是距离传感器,根据设定的数值,在达到预定距离后距离传感器会发送信号给I0.0,进而通过PLC控制系统来控制木地板自动铺设装置的转向;I0.1接通的是红外定位装置,在铺设过程中,木地板到达指定位置后,红外定位装置会给PLC发送信号,使PLC控制机械臂把木地板放下。控制系统通信示意图如图3所示。

同时通过编程软件设计出HMI触控面板,图4为控制系统主界面,有启动、停止和手动等按钮。当按下启动按钮时,木地板自动铺设装置自动运行;按下停止按钮时,装置停止;按下手动按钮时,进入手动控制界面,如图5所示,其功能设置包括木地板自动铺设装置的直行和转向,机械臂的水平和垂直移动,吸附装置的吸附和释放。


4 木地板自动铺设装置的三维设计
本文结合选用的舵机、步进电机和气泵的相关参数以及相关结构的设计参数,使用UG NX12.0三维建模软件,先把各个部位的零件绘制出来,再通过该软件的装配模块,添加装配约束关系,使各零部件装配到一起,从而构建出木地板自动铺设装置的三维模型,结果如图6所示。
5 结语
木地板自动铺设装置的机械臂伸直后长度为700 mm,可实现高度在70 cm内的作业。当一块木地板铺设完成之后,木地板自动铺设装置会向前移动到下一个位置再铺设下一块木地板,在移动过程中,推板会推动木地板从储板箱推出,使其进入滑轨,从滑轨滑到挡块的位置,然后机械臂会吸附木地板,当木地板自动铺设装置移动完成之后,机械臂会把木地板连接上一个木地板继续铺装。机械臂上添加了红外装置实现木地板的定位,可使木地板铺装在指定位置,实现精准铺设。本文设计的木地板自动铺设装置能够用于室内作业,采用机械臂抓取与定位放置木地板,实现木地板的自动铺装,且人工与机械结合,提高了施工效率,大大减少了工人的劳动作业时间,同时也降低了工人的劳动强度和患病率。
