多自由度并联机构运动性能分析及尺寸优化
2022-09-22王成非
王成非,陈 贺,刘 东
(中国船舶重工集团公司第七二三研究所,江苏 扬州 225001)
0 引言
随着科技的日益进步和生产自动化程度不断提高,基于多支链的并联机构以其结构简单、刚度大、承载能力强、运动精度高且速度快、易于控制等良好特性适应了生产发展的需要,并受到了国内外众多专家和学者的重点关注。目前,并联机构已经在工业自动化、航空航天、医疗和测量等领域中不同场合都得到了成功应用。
运动性能分析是并联机构研究领域的重要内容,对机构的设计和优化及控制策略的选择具有重要意义,国内外很多学专家学者进行了大量研究。Angeles等[1]和Cosselin等[2]对机构性能指标和机构优化设计进行了研究。高峰、刘辛军、郭希娟、余梅生等基于一阶和二阶影响系数对机构性能指标的研究做了大量贡献[3-7],此外杨育林、陈海真、高彦锟、石志新等基于机构性能指标的研究上对机构结构参数优化问题进行了研究[8-11]。因机构的尺寸参数的多维性和性能指标的严重非线性,尽管做了大量研究,但仍有大量问题没有解决,影响了机器人机构的开发和应用。
6-PSS并联机构不仅具有刚度大、承载能力强和精度高等通用特点,还具有机构相对简单、对称、大工作空间及快速运动的特点。该机构在运动模拟器、并联机床、微动机器人、航空航天及医学等领域有着广泛应用前景。本文首先对该6-PSS并联机构进行了参数化设计,随后对该机构的运动学及运动学性能进行了分析,提出优化目标,对其结构尺寸参数进行了优化,大大提高了该机构的综合运动性能。
1 机构的描述与坐标系建立
6-PSS并联机构由运动基座(安装有导轨)、滑块、球铰、动平台、执行器(支杆)以及拉杆等组成。如图1所示,P为与动平台固连的执行器末端的几何中心,其在动平台的投影为Q;Pi为移动副,这里称为滑块;Li为6根定长的拉杆;SAi和SBi为球铰副,安装在6根拉杆的两端,分别连接了6个滑块和动平台。导轨、滑块和上、下球铰关于平面XOZ对称。该并联机构由6个安装有直线电机的滑块为输入,带动拉杆、动平台一起运动,实现执行器按照给定的可控的运动规律运动(3个移动和3个转动的任意一种或者组合)。

图1 6-PSS并联机构
假设执行器相对于各坐标轴无转动和移动时为机构的初始位形,以初始位形时执行器轴线在导轨平面的投影点为原点建立固定坐标系O-XOZ,垂直导轨平面向下为Z轴,X轴与导轨平行指向P1一侧,右手定则确定Y轴;以执行器末端几何形心P为原点建立动坐标系O1-X1Y1Z1,初始方位和固定坐标系相同,随执行器一起运动。
该并联机构结构尺寸主要有11个参数:整个机构的高度(执行器末端到导轨平面的距离)h0,两侧导轨间距离的一半e和f,拉杆的长度l1和l2,动平台长度(下球铰SB4到SB6的距离)为2a,动平台宽度(下球铰SB1到SB4的 距 离)为2b,下 球 铰SB2(SB5)到 平 面Y1O1Z1的距离c,下球铰SB2到SB5距离的一半d,下球铰SB2(SB5)到平面X1O1Y1的距离h2,平面SB1SB3SB6SB4到平面X1O1Y1的距离h1。初步确定机构尺寸参数如表1所示,其中拉杆L1、L3、L4、L6的长度取l1,拉杆L2、L5的长度取l2。

表1 机构尺寸参数初值表m
2 影响系数的求解
对于6-PSS并联机构,因其机构结构上具有对称性且支链具有相似性及对称性,以机构第1支链为例。如图2所示,按主动件到末端执行器,依次求得支链1简化并用单自由度转动副替换化后各运动副轴线方向的单位矢量分别为:

图2 6-PSS并联机构支链1运动副简化图

于是,可以求得6-PSS并联机构支链1的一阶影响系数矩阵1):

式中:P为动平台末端执行器P点在固定坐标系的位置矢量;Rj(j=SA1、SB1)为运动副在固定坐标系的位置矢量;P-Rj为末端执行器P点对支链1各运动副轴线的位置矢量。
其余5条支链的一阶影响系数矩阵求法与支链1的求法类似。首先简化,然后把对应运动副轴线向单位矢量S(i)j及矢量(P-Rj)(i)进行相应的替换即可。每条支链的一阶影响系数矩阵都是6×6矩阵,则该并联机构共有6个6×6的一阶影响系数矩阵。
当已知动平台的运动时,支链i各运动副的速度和平台速度的关系为:

式中:VH=[ωhx,ωhy,ωhz,VPx,VPy,VPz]T,为动平台速度矢量;=[φ1,φ2,φ3,φ4,φ5,φ6]T,为支链i各运动副组成的速度矢量。
以6个移动副为主动输入件的运动方程如下:

将上式以矩阵形式表示为:


对式(4)求逆,于是有:

已知支链上6个主动输入运动副的相对加速度时,其与动平台加速度的显式解析式可以表示为:

由式(3)和式(5)联立得到支链i各运动副相对速度与广义速度的关系为:

已知并联机构的每条支链的第一个运动副为主动输入件,由于机构完全对称,联合式(7)将式(6)化简归并为一个式子:

对式(8)进一步简化,得:

式中:[HqH]矩阵为6×6×6的标量矩阵。
因此,动平台的加速度用对广义坐标的二阶影响系数表示为:

3 运动学性能指标分析
机构运动学性能指标包括线速度、角速度、线加速度和角加速度性能指标。线速度、角速度由机构的一阶影响系数决定,而线加速度和角加速度受机构的一阶、二阶影响系数共同决定。其条件数用一阶、二阶影响系数依次表示为:

式中:‖‖为矩阵的Frobenius范数;上标“+”为矩阵的广义逆矩阵;K为条件数,且1≤K<∞;aq、bq为误差系数,均小于1(用于综合性能指标的计算时常取为0.02);Gυ、Gω分别为一阶移动影响系数矩阵和一阶转动影响系数矩阵;Hυ、Hω分别为二阶移动影响系数矩阵和二阶转动影响系数矩阵,其与影响系数之间的关系为。
一阶、二阶影响系数矩阵的条件数随着机构的位形的不同而变化,在机构的工作空间内不同的点,其条件数是不同的,这样无法准确地描述机构运动性能好坏。鉴于此,Gosselin在工作空间的基础上提出了全域性指标,定义机构速度和加速度的全域性能指标为:

式中:i∈{Gω,Gυ,Gω+Hω,Gυ+Hυ};W为末端执行器的可达工作空间;ηj为全域性能指标,1≥ηi>0,ηj的值越大,机构灵巧度和控制精度越高,机构的运动学性能也越高。
η的大小可以反映机构在整个工作空间内运动性能的平均水平的高低,但它仅反映了机构在整个工作空间内平均运动性能的情况,并不能体现出在整个工作空间内性能波动幅度的信息,于是提出条件数倒数的均方差为全域性能波动指标[9]:

4 实例分析及尺寸优化
现在保持其他结构参数值不变,改变机构的动平台的长度和宽度这两个结构参数值为例,对机构的线速度和角速度性能指标进行仿真。让a=200~300 mm,b=200~300 mm,步长都取为20 mm,组成36组机构位形;对每组机构位形的每个自由度在可达工作空间空间中均匀取均取100个点进行仿真计算,绘制全域性能图谱如图3和图4所示。
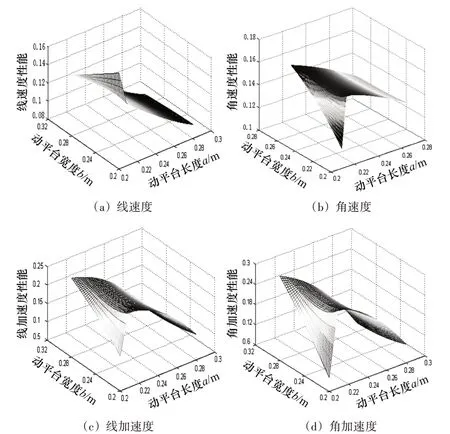
图3 全域性能图谱

图4 全域性能波动图谱
由图3可以看出,机构的线速度、角速度、线加速度和角加速度性能指标在左上方较大,右下角较小。即在一定范围内,当动平台长度尺寸变小、宽度尺寸变大时,6-PSS并联机构的线速度、角速度输出误差越来越小,机构的运动学指标越来越好。从图4中可以得到机构运动性能波动随着动平台尺寸变大而变大,但动平台宽度对其性能的影响相对较小。同理可求其他尺寸参数对机构运动学性能的影响,最终得到最优的机构尺寸和控制策略。
对于机构中动平台的尺寸参数,综合考虑上述分析得出的全域性能和全域性能波动图谱,确定动平台的长度参数为a=0.2 m,动平台的宽度参数b=0.25 m。同理可以对机构的其他尺寸参数进行优化,最终得到优化后的机构尺寸参数如表2所示,此时6-PSS机构性能指标值如表3所示。

表2 机构优化后的尺寸参数表m

表3 机构优化尺寸后机构性能指标值
5 结束语
本文以6-PSS机构为研究对象,对该机构运动学性能分析及机构结构尺寸参数优化方面展开了研究和探讨。首先分析了其结构特点并建立坐标系同时进行了尺寸参数设计,利用影响系数法求解出一阶、二阶影响系数矩阵,对运动学性能的全域性能指标及全域性能波动指标进行了分析。然后以动平台的宽度和长度尺寸为实例分析,得到了相应的全域性能及全域性能波动图谱,通过分析图谱得到机构结构尺寸参数对运动性能的影响规律。同理可得到其他尺寸参数对机构运动性能的影响,进而能够综合取舍进行尺寸参数的优化,提高机构的运动性能,为实现机构的尺寸优化并提高机构性能提供了理论参考和一套简单、实用的方法。
