利用时空特征编码的单目标跟踪网络
2022-09-20王蒙蒙杨小倩刘勇
王蒙蒙,杨小倩,刘勇
浙江大学控制科学与工程学院,杭州 310027
0 引 言
单目标跟踪旨在仅给定任意对象在初始帧目标位置的情况下,跟踪后续视频中的对象。目标跟踪是监控系统、机器人和人机交互等大量多媒体认知理解的基础任务。由于大多数实际场景应用中的硬件计算资源有限,且基于在线模型更新的跟踪器网络结构较为复杂和运行速度较慢,难以部署落地,因此探究简单易用的跟踪算法框架十分重要。高性能的跟踪器往往通过使用注意力机制、模板更新等常用策略提升性能。与之不同的是,本文从视频时空特征角度出发,基于序列的时序外观一致性和空间位移约束进行建模,避免使用复杂网络结构和模型更新等策略,较好地平衡了跟踪器的性能和速度。
视觉跟踪任务中的视频时空属性并未充分探究和开发。作为一项视频分析任务,对跟踪来说至少有两个潜在特性和优势。1)目标具有空间位移约束,这意味着除非发生剧烈的物体或相机运动,相邻帧之间的目标位置不会相距太远。现有的视觉跟踪器(任仙怡 等,2002;Henriques等,2015;Li等,2018;Zuo等,2019; 宫海洋 等,2018;Danelljan等,2019;宁纪锋 等,2014;王鑫和唐振民,2010)几乎都遵循空间位移约束,并根据目标在上一帧中的位置在当前帧中开展搜索。2)目标具有时序外观一致性,这表明相邻帧之间的目标外观变化比较微弱,整个序列从时间维度上来看,目标外观是缓慢平滑变化的。时序外观一致性可以提供上下文信息,为后续帧的预测提供有效线索,然而该特性在现有工作中并没有得到充分挖掘和研究。
现有的跟踪器对时序外观一致性的利用主要有两种方式。第1种方式是将视觉跟踪建模为初始目标与后续帧的匹配问题,基于孪生网络(siamese network)的跟踪器(Li等,2018,2019;Bertinetto等,2016;Xu等,2020;Zhu等,2018;Fan和Ling,2019;Zhou等,2020;Chen等,2020;Guo等,2020)是其中最经典和有效的方法。它们采用one-shot方式进行视觉跟踪,将视频第1帧中的目标作为模板,将后续帧中的搜索区域作为候选目标,然后将跟踪任务变为从每一帧中找到与模板最相似的候选目标。这种方式完全忽略了其他历史帧的有效信息而每次独立处理每一帧,造成巨大的信息损失。第2种方式,许多传统方法(Henriques等,2015;丁欢和张文生,2012;陈晨 等,2020;Hare等,2016)和基于深度学习的方法(Danelljan等,2019;Bhat等,2019;宋建锋 等,2021;Dai等,2020;周笑宇 等,2021)同时使用初始目标和历史目标信息(历史目标为每一帧或选定的帧)预测当前帧的目标位置。然而,这种方式对于如何平衡准确率和时间延迟,尤其是基于深度神经网络的方法,仍然是一个较为困难的问题。此外,网络微调在一些实际场景中是无法实现的,如将算法部署到硬件芯片上,严重阻碍了跟踪算法的实际落地应用。
针对上述困难,提出一种新的跟踪器,从视频分析角度重新对跟踪问题建模,本文设计了一种时间感知网络(temporal-aware network,TAN),旨在没有在线模型更新的前提下,利用前向推理中的时序外观一致性,对多个视频帧的信息同时进行编码。在网络中引入了时间聚合模块(temporal aggregation module,TAM),以交换和融合历史帧中的信息,使跟踪器TAN能够学习目标的时空特征。为了平衡多帧输入的处理速度和跟踪精度,采用轻量级网络ResNet-18作为特征提取骨干网络(backbone network),跟踪器速度达到70帧/s。与使用在线模型微调的方法不同,跟踪器TAN能够在跟踪过程中进行完全前向推理,在不需要任何网络权重学习或微调的情况下,通过离线训练以学习适应目标的外观变化。此外,为了构建简单通用的跟踪框架,本文设计了一种无锚(anchor-free)、无候选(proposal-free)的目标估计方法,即检测目标的4个角点,包括左上角、右上角、左下角和右下角。使用角点检测头(corner detection head)得到4个角点后,根据左上—右下角点,右上—左下角点分别得到两组目标候选框,然后通过候选框的中心点置信度分数确定最终目标位置,而不必考虑复杂的约束关系,这能进一步减少目标位置的推理时间。使用这种基于角点的目标估计机制,跟踪器TAN能够应对多种具有挑战性的场景,如局部遮挡、外形变化等。
本文提出的跟踪方法简单直观易于实现,达到了领先算法的跟踪性能和很快的推理速度。这种实时有效的跟踪算法框架跟踪器在性能和速度上达到了很好的平衡,更适用于实际场景,尤其对于不支持复杂模型和在线模型更新且计算资源有限的硬件平台。本文提出的框架为视觉跟踪领域提供新的思考视角,主要贡献在于:1)提出一种速度与精度平衡的目标跟踪算法,即时间感知网络(TAN),利用视频中的时序外观一致性优势和空间位移约束,对目标时空特征进行建模。在跟踪过程中无需在线模型更新,即可应对目标在时序上的各种变化;2)设计了一种简单有效的目标估计方法,即检测目标边界框的4个角点,该方法能够使跟踪器有效应对多种具有挑战性的场景,如局部遮挡、外形变化等;3)以ResNet-18为主干网络,提出的目标跟踪框架在多个公开数据集上达到领先水平,实现了70帧/s的高速推理。
1 相关工作
关注视频时序特性的研究,尤其是对时序外观一致性,将现有方法分为基于初始模板的跟踪器和基于历史模板的跟踪器两类。此外,针对引入的基于角点检测头的目标估计方法介绍一些相关的跟踪器。
1.1 基于初始模板的跟踪器
基于初始模板跟踪指跟踪器离线训练学习通用特征表示,然后仅使用初始模板对新目标进行跟踪。基于孪生网络的跟踪器(Wang等,2019;Yu等,2020;Yang等,2020)是最经典的one-shot学习方法。SINT(siamese instance search for tracking)(Tao等,2016)和SiamFC(fully-convolutional siamese networks for object tracking)(Bertinetto等,2016)作为孪生网络的开创性工作,将视觉跟踪任务表示为初始帧目标与后续帧的成对匹配问题。受目标检测任务中区域候选网络(region proposal network,RPN)和孪生网络跟踪框架的启发,SiamRPN(high performance visual tracking with siamese region proposal network)(Li等,2018)将跟踪推理视为一个one-shot局部检测任务,使用两个权值共享的骨干网络进行特征提取,并使用RPN头实现目标分类和边界框回归。SiamRPN++(Li等,2019)打破了深度卷积特征中平移不变性的限制,使用ResNet-50或更深层的网络作为特征提取主干,跟踪精度在多个公开数据集上提升到更高水平。这些方法通过离线训练且没有模型更新,完全通过初始模板和后续帧的相似性度量进行目标定位跟踪,忽略其他历史帧信息,造成巨大的信息浪费。
1.2 基于历史模板的跟踪器
在考虑使用目标历史模板的信息时,现有方法大多研究模型更新策略(Danelljan等,2019,2020;Bhat等,2019)。MDNet(multi-domain convolutional neural network)(Nam等,2016)由共享层和特定域的多分支层组成,跟踪过程中通过在线微调以适应新目标。UCT(learning unified convolutional networks for real-time visual tracking)(Zhu等,2017)通过引入峰值降噪比(peak-versus noise ratio,PNR)的方法,避免由于跟踪不准确而引入错误背景信息。ATOM(accurate tracking by overlap maximization)(Danelljan等,2019)提出一种新的跟踪框架,由目标框回归分支和分类分支组成,其中分类分支可以在线训练以提高跟踪器对背景和目标的区分能力。DiMP(learning discriminative model prediction for tracking)(Bhat等,2019)和PrDiMP(probabilistic regression for visual tracking)(Danelljan等,2020)都是ATOM的后续工作,分别改进了分类分支和回归分支。
另一种代表性跟踪器是基于元学习的方法。这类跟踪器首先基于各种检测任务进行训练,然后通过包含目标历史信息的少量训练样本(包括第1帧和后续多帧)微调网络以快速学习适应新目标。Meta-tracker(Park和Berg,2018)是第1个在跟踪任务中使用元学习训练模型的方法。Huang等人(2019a)直接将目标检测器转换到跟踪器中,使用元学习方式学习检测头中的元学习层(meta-layer)。
上述提到的跟踪器试图利用多个历史帧挖掘更多的视频时序特性。然而,本文提出的跟踪器能够实现完全前向推理(fully feed-forward process),无需任何模型更新策略。MemTrack(learning dynamic memory networks for object tracking)(Yang和Chan,2018)和MemDTC(visual tracking via dynamic memory networks)(Yang和Chan,2021)是与本文最相似的方法,利用目标历史信息且不在线更新模型权重,但是它们需要使用额外的动态长短期记忆网络(long short-term memory,LSTM)模型适应跟踪过程中目标的外观变化。相比之下,本文方法无需使用任何额外网络来编码或存储历史目标信息,提出的跟踪网络在性能和速度上达到了平衡。
1.3 基于角点的跟踪
一般的多尺度搜索策略无法在涉及目标变化等困难场景下估计密集的边界框,因此如何估计准确的边界框引起了研究人员的兴趣。虽然基于角点的跟踪器可以灵活地应对这些变化,但是这类跟踪器尚未成熟。GOTURN(generic object tracking using regression networks)(Held等,2016)和SATIN(siamese attentional keypoint network for high performance visual tracking)(Gao等,2020)使用全连接网络和互相关操作检测物体角点,但是这些方法并没有表现出很强的性能。CGACD(correlation-guided attention for corner detection based visual tracking)(Du等,2020)使用基于相关性引导的注意力角点检测来突出角点区域并增强感兴趣区域(region of interest,RoI)特征以实现角点检测,从而实现边界框估计。Ocean(Zhang等,2020)提出一种基于对象感知的无锚(object-aware anchor-free)网络,以无锚的方式直接预测目标的位置和尺度。SiamKPN(siamese keypoint prediction network for visual object tracking)(Li等,2020)提出一种从粗到细(coarse-to-fine)的角点检测的级联热图策略。本文设计的角点检测头与以上方法不同,主要体现在两方面。1)直接预测一个目标的4个角点,并按对角构成两个边界框,能够应对遮挡、形变等一些具有挑战性的场景;2)采用简单有效的目标框选择机制,通过预测边界框的中心置信度分数而不是复杂的约束来确定目标的最终位置。
2 方 法
2.1 时间感知网络


图1 时间感知网络的总体框架Fig.1 Overview of the proposed temporal-aware network
相关性模块结构如图2所示,首先是一个3×3的卷积层,后接批量归一化层(batch normalization,BN)以及ReLU激活函数层调整两个输入特征,同时将空间通道减少至1/2以减低计算成本。使用一个深度互相关卷积层(depth-wise cross-correlation layer)(Li等,2019),将φT当做卷积核以结合两输入的特征。
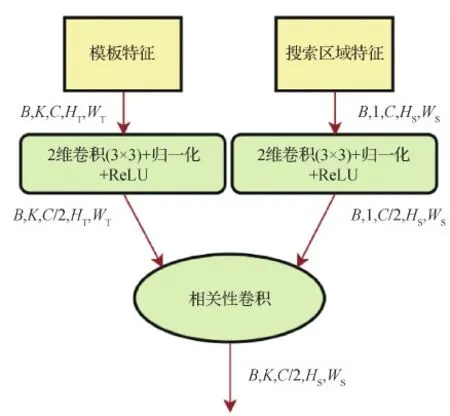
图2 相关性模块Fig.2 Correlation module
F=ReLU(BN(W1*φS))★ReLU(BN(W2*φT))
(1)
式中,★代表深度互相关卷积层,*代表普通卷积,W1和W2分别代表φS和φT的3×3卷积核权重。
由于上述特征在时间维度上是离散的,因此提出一种新的时间建模策略,即时间聚合模块,使网络TAN具备学习时空特征的能力。最后,利用角点检测头和置信度检测头得到目标的4个角点和中心位置置信度IS。
一般来说,多尺度特征融合是提高目标检测和视觉跟踪等任务性能的常用方法。网络深层低分辨率输出产生的定位结果一般粗糙且鲁棒,而浅层高分辨率输出产生的结果趋向于与深层互补。原因是不同层对特征的表示不同,浅层主要表示颜色、纹理等低级特征但缺乏语义信息,而高层获得的高级特征能编码丰富的语义信息。因此,从多个尺度构建层级特征可以鲁棒精确地定位目标。与常用的ResNet网络中4个阶段特征(res1—res4)的方法对比,本文发现第1个池化层(res 0)的特征对跟踪也非常有效,消融实验验证了这一点。
2.2 时间聚合模块

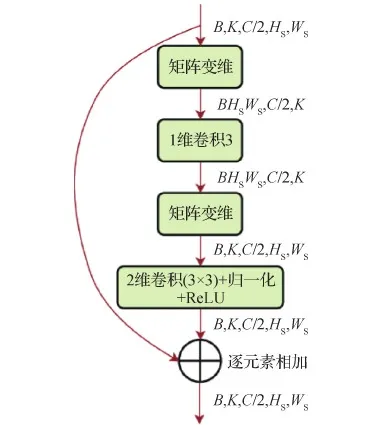
图3 时间聚合模块Fig.3 Temporal aggregation module
(2)

A=F⊕ReLU(BN(W4*H))
(3)
式中,⊕代表逐元素相加,W4是3×3空间卷积的权重,A是时间聚合模块的输出特征。通过提出的时间聚合模块,多个模板的信息可以准确地进行融合增强以更好地定位目标。
2.3 目标定位头
为了构建一个简单实用的跟踪框架,提出一种新颖的无锚(anchor-free)、无候选(proposal-free)的目标估计方法。将目标定位分解为角点检测和中心置信度预测两个子任务,分别由角点检测头和分数预测头实现。如图4所示,目标候选位置由左上—右下角点或右上—左下角点构成的两组候选框组成,然后根据它们在置信度图中的中心置信度分数决定最终位置。

图4 角点检测结果Fig.4 Results of our target localization heads
如图1所示,角点检测头学习目标的左上角、右上角、左下角和右下角。这个头部CNN结构由一个3×3空间卷积层、BN层和ReLU激活函数以及这些层的重复结构组成。因为K个输入模板对应K个输出(每个输出的4个通道分别代表4个角点),需要进行融合将时间维度从K降到1以获得4个角点的位置置信图,这里使用了池化操作(Pool),表述为
Pc=Pool(ReLU(BN(W6*
ReLU(BN(W5*A)))))
(4)
式中,W5和W6是3×3空间卷积层的权重,Pc是4个通道的角点预测输出。置信度预测头Ps的网络结构除了输出是1个通道外,其他部分和角点检测头相同。这两个预测头的权重不共享。
本文4个角点的检测策略不是如CornerNet(Law和Deng,2019)、CGACD(Du等,2020)和SiamKPN(Li等,2020)中只检测两个角点,而是发现在某些情况下两个角点会失败,如图4中的遮挡场景,4个角点可以获取更多信息以克服这些困难。在图4中,红色框表示目标的真实位置,黄色和绿色框及其对应的角点分别显示了预测的两组候选框“左上—右下”和“右上—左下”。图4中,同一列来自同一个视频随机抽取的两帧,从中发现预测多组角点可以克服各种遮挡问题。
2.4 训练和推理
在整个框架的训练和推理方法中,网络框架TAN完全离线训练,并且推理过程无需任何模型微调。如图5所示,本文算法的损失计算仅存在于训练阶段。由于原始的res3和res4层的输出分辨率大小相同,所以没有上采样。由于两个头的处理方式相同,因此省去每个原始输出的下标。
2.4.1 离线训练
基层的党建政工工作与企业的生产和发展息息相关,企业在进行管理工作时,就需要重视企业的基层党建工作,这样不但可以提升员工的工作热情,更可以提升企业中党组织的重要性。进行基层党建政工工作,有效的树立员工的榜样带头作用,增强员工的思想觉悟,帮助企业更好更快的发展。

(5)
式中,1是其下标的指示函数,⊙代表矩阵点乘,θ是过滤背景区域的阈值,下标*代表角点(corner)或中心点(center),上标i∈{0,…,N}表示不同的特征层级。使用L2损失函数对真实热度图和预测热度图进行监督,并且以等权重对不同特征尺度的角点和中心点进行加权。训练和推理过程如图5所示,对每个尺度的输出都进行监督,最终的训练损失可以表示为
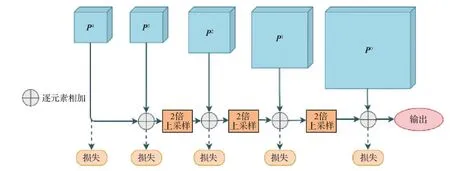
图5 训练和推理过程Fig.5 Training and inference process

(6)

2.4.2 推理
在推理阶段需要设计网络的输出解码策略,获得最终的目标位置和构建网络输入。如图5所示,当网络输出包含所有尺度的角点和中心置信度的预测热度图时,最简单的融合方式是将低分辨率的输出上采样到更高的分辨率相加并求其均值,并将最高分辨率输出视为最终的热度图。然后,使用argmax操作在每个热度图中找到最大响应位置,按角点对(左上—右下,右上—左下)构成两组边界框,最后在中心置信预测热度图中分别找到两个边界框对应中心点的置信度分数(s1,s2),选择较大者作为最终的目标位置。
[1,rand([2,M-6],K-2),rand([M-5,M],1)]
(7)
3 实 验
3.1 实验细节
3.2 对比实验和分析
实验在5个大型跟踪数据集基准中进行,包括OTB50(online object tracking: a benchmark)(Wu等,2013)、OTB100(Wu等,2013)、TrackingNet(Müller等,2018)、LaSOT(Fan等,2019)和UAV(a benchmark and simulator for UAV tracking)123(Müller等,2016),将TAN与先进的跟踪器比较和评估。虽然TAN实现简单,但仍获得与排名靠前跟踪器相当的结果,并达到70帧/s的推理速度,比大多数跟踪器快。总体来看,跟踪器TAN简单实用,达到了精度和速度的平衡。表明了本文方法对视频时序外观一致性利用的有效性。
3.2.1 在OTB50数据集上对比实验

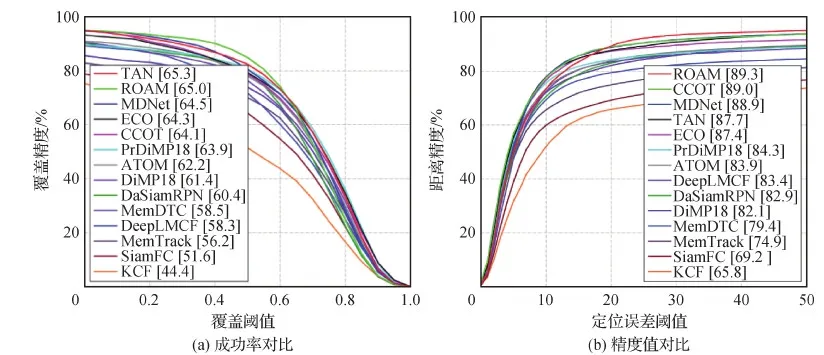
图6 先进跟踪器在数据集OTB50上的对比结果Fig.6 Comparison of the quality of state-of-the-art tracking methods on OTB50 dataset((a)success plots of OPE;(b)precision plots of OPE)
3.2.2 在OTB100数据集上对比实验
OTB100数据集比OTB50多50个视频序列,评价指标与OTB50相同。图7展示了提出的框架TAN与先进跟踪器的比较结果。可以看出,TAN成功率在所有结果中位列第2,稍低于第1的ECO(efficient convolution operators for tracking)算法。但ECO算法使用了模型更新策略提升性能,且运行速度仅为8帧/s,远低于实时性要求。CCOT(continuous convolution operators for visual tracking)的精度值最高,但运行速度低至0.3帧/s,限制其根本不可能应用于实际场景。相比之下,TAN在成功率和精度值两个指标上分别达到68.2%和89.3%。TAN的成功率仅比ECO低0.9%,但速度为70帧/s,远超ECO的8帧/s;TAN的精度值比CCOT低2.2%,但速度是其上百倍。与使用相同骨干网络且需要模型更新的ATOM、DiMP18和PrDiMP18方法相比,TAN取得了更好的成功率(68.2%与66.3%、66.0%、67.9%)和精度值(89.3%与87.4%、85.9%、87.1%),且速度更快(70帧/s与30帧/s、57帧/s、40帧/s)。
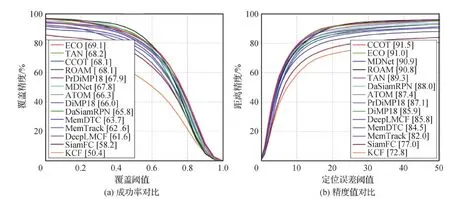
图7 先进跟踪器在数据集OTB100上的对比结果Fig.7 Comparison of the quality of state-of-the-art tracking methods on OTB100 dataset((a)success plots of OPE;(b)precision plots of OPE)
3.2.3 在LaSOT数据集上对比实验
LaSOT数据集提供了大规模、高质量的密集标注,共有1 400段训练视频和280段测试视频,包含70类物体,每类有20段视频序列,视频总体平均长度超过2 500帧,非常适用于评估长时序列跟踪器。LaSOT采用与OTB相同的OPE方式测试成功率和精度。表1展示了TAN与其他先进跟踪器在成功率、精度、归一化精度和速度等方面的比较。跟踪器ATOM和DiMP18性能优于本文的跟踪器TAN,但在速度上逊于TAN。这两个算法在OTB50和OTB100上表现都不如TAN,在该数据集上却表现良好,本文认为是因为它们使用了在线模型更新策略,这对长时序列能更好地表示目标的变化,而本文所用的存储库机制不足以应对长时序列变化的情况。与其他跟踪器相比,跟踪器TAN在性能和速度上都有明显优势。
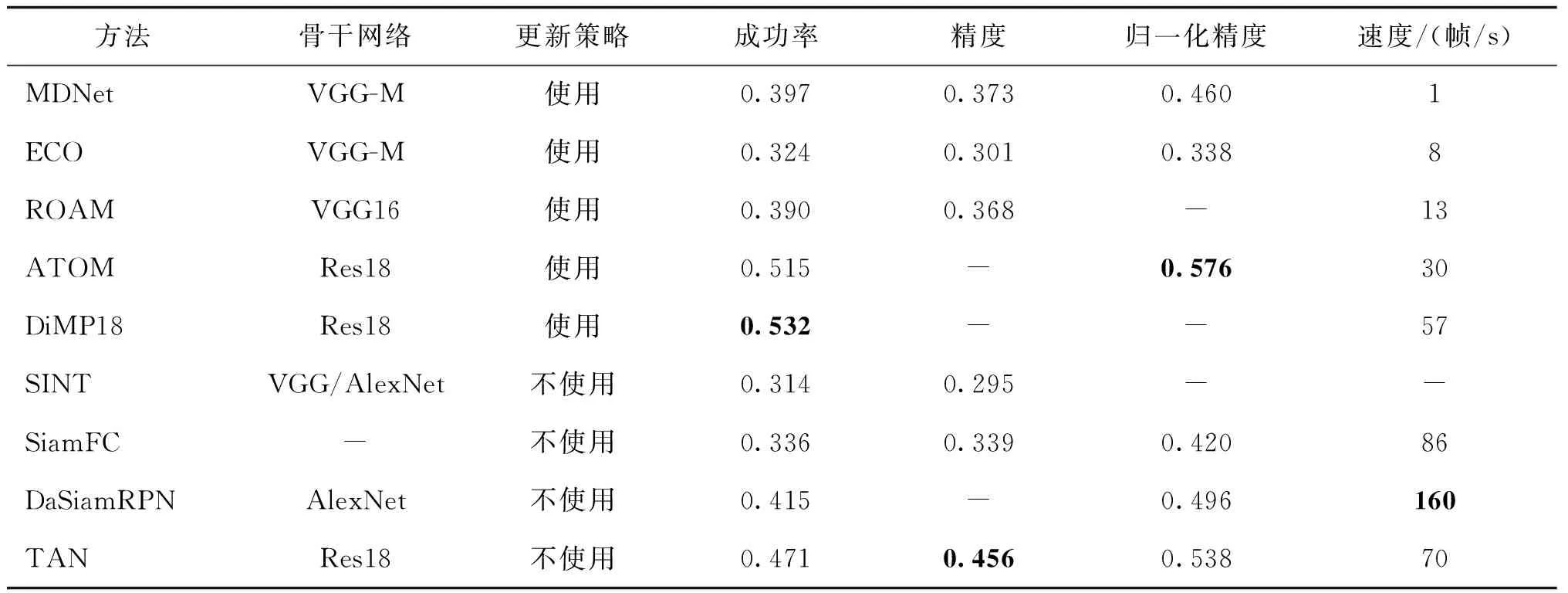
表1 先进跟踪器在数据集LaSOT上的对比结果Table 1 Comparison of the quality of state-of-the-art tracking methods on LaSOT dataset
3.2.4 在TrackingNet数据集上对比实验
TrackingNet大规模数据集由在YouTube上采集的真实视频组成,包含30 000个序列,1 400万个标注及511个测试序列,涵盖了不同的对象类别和场景。实验对511个测试序列采用在线测评的方式,评价指标为成功率、精度和归一化精度,遵循测试规则对所提出的跟踪器TAN进行测试,且与先进跟踪器进行对比,结果如表2所示。可以看出,TAN的表现与在LaSOT数据集中的对比相似,ATOM和DiMP18性能优于TAN,但是跟踪器TAN速度更快,且简单易用,能够部署到一些不支持在线模型更新和硬件计算资源有限的平台上。
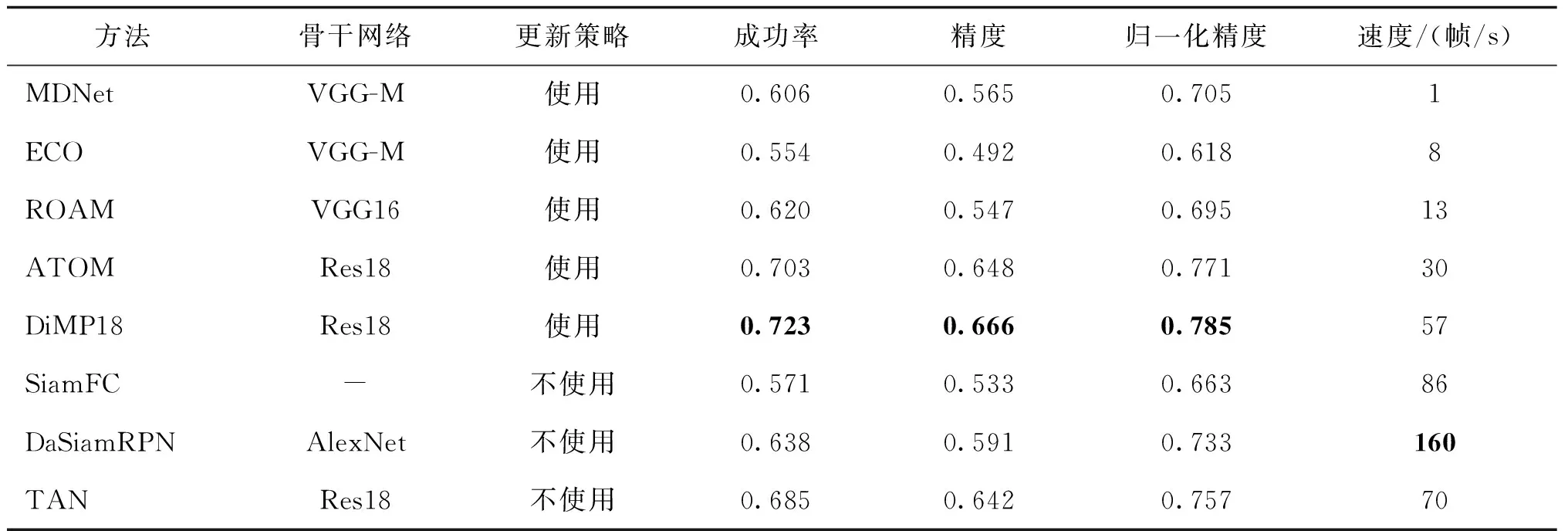
表2 先进跟踪器在数据集TrackingNet test set上的对比结果Table 2 Comparison of the quality of state-of-the-art tracking methods on TrackingNet test set
3.2.5 在UAV123数据集上对比实验
UAV123数据集包含由无人机捕获的123个视频序列,平均序列长度为915帧,所有视频帧都有边界框标注。数据集包含多种困难场景,如快速运动、尺度变化、光照变化和遮挡等,对跟踪器具有一定的挑战性。实验与OTB评测方式和指标相同,但UAV123数据集的序列长度更长,难度更大。表3展示了不同跟踪器在该数据集上的对比结果。可以看出,TAN的性能(59.2%)优于MDNet(52.8%)、
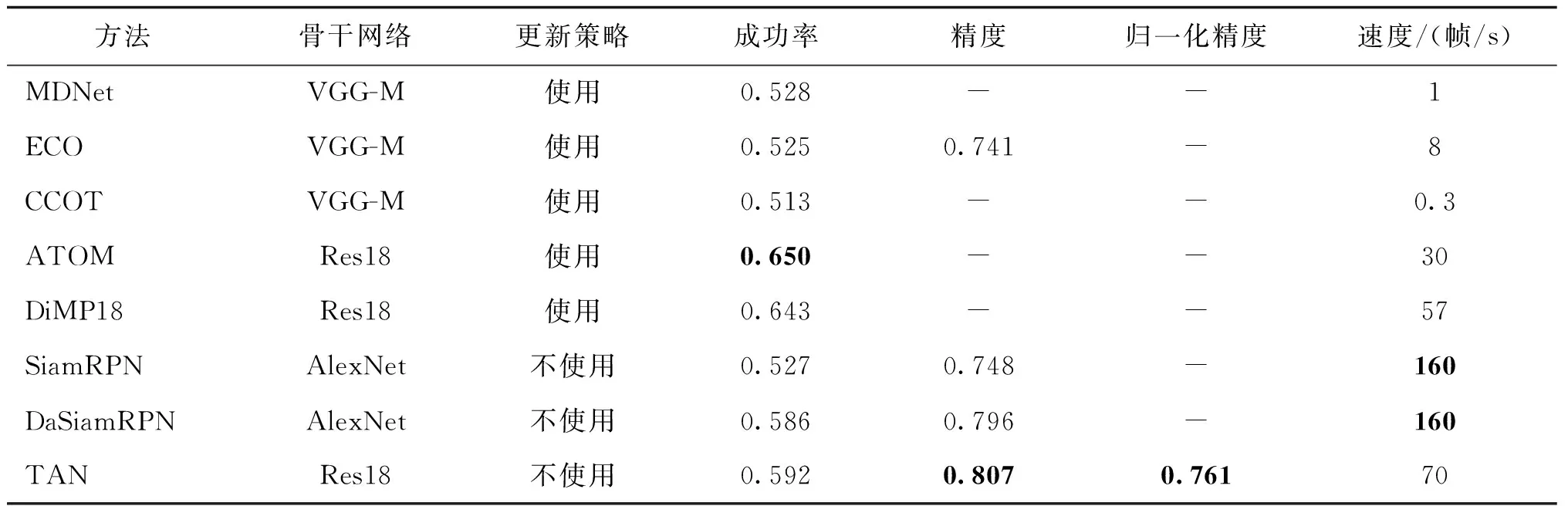
表3 先进跟踪器在数据集UAV123上的对比结果Table 3 Comparison of the quality of state-of-the-art tracking methods on UAV123 dataset
ECO(52.5%)和CCOT(51.3%)等使用模型更新的方法。与OTB相比,UAV123中序列长度较长,在线模型更新对性能提升有很大帮助,使用在线更新的跟踪器的ATOM和DiMP18的性能优于未使用的SiamRPN和DaSiamRPN。本文使用的存储库机制也难以应对长序列中一些目标漂移、消失等问题,导致跟踪失败。这个问题在未来会继续探索,寻求更有效的存储库维护和更新策略。
3.3 消融实验
为了分析验证所提出的每个模块的有效性,在数据集OTB100上进行消融实验。
3.3.1 多尺度特征融合的消融实验
如第2.1节所述,通过多尺度构建层级特征可以精确定位目标位置。实验对比了融合浅层特征res0和深层特征res4到不同其他层级特征的效果,这两层级特征在以往跟踪器中很少使用。表4展示了这两层级特征对跟踪器效果的有效性。可以看出,与仅使用res1—res3相比,添加res0能够在成功率和精度上分别带来2.5%和1.3%的增益;与仅使用res1—res4相比,分别提高2.8%和3.7%。同理,与仅使用res1—res3相比,添加res4能够分别带来1.6%和0.9%的提升,与仅使用res0—res3相比,两个指标分别提升了1.9%和3.3%。实验结果表明,使用res0—res4特征融合能得到更好的效果。
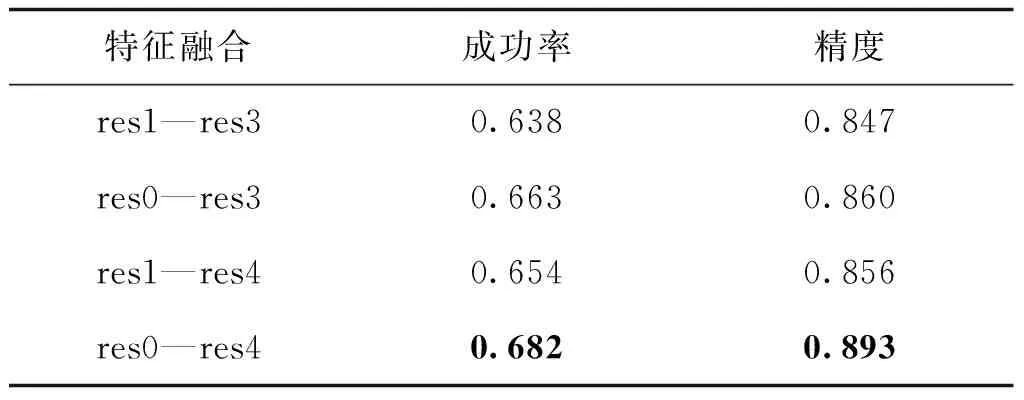
表4 多尺度特征融合的消融实验结果Table 4 The ablation study results of mulit-scale feature fusion
3.3.2 时间聚合模块的消融实验
为验证时间聚合模块(TAM)的有效性,对TAM进行消融实验,结果如表5所示。可以看出增加TAM后,成功率和精度分别达到了68.2%和89.3%,提高了3.2%和5.1%。此外,消融实验还测试了网络共享TAM的效果,角点检测头和置信度预测头共享TAM模块时,性能比分开使用TAM分别差了0.6%和1.4%。实验结果表明,时间聚合模块通过融合多个模板的特征,能够明显提升跟踪性能,使用分离TAM能获得更好的效果。
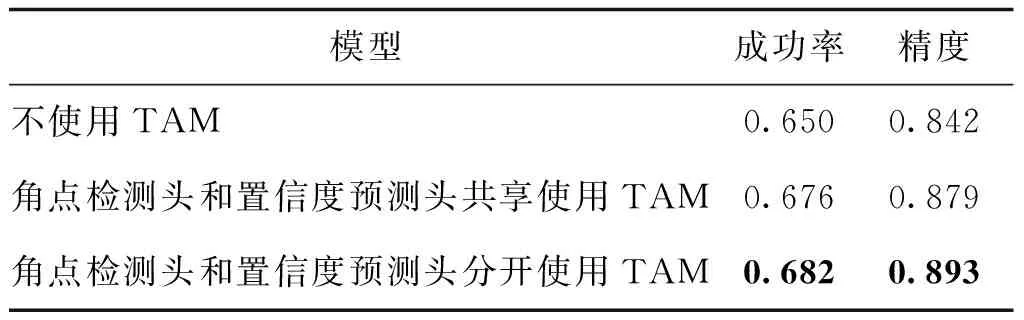
表5 时间聚合模块的消融实验结果Table 5 The ablation study results of temporal aggregation modules
3.3.3 时间融合模块的消融实验
如第2.3节所述,多个时间特征融合的方式有1×1卷积、最大池化和平均池化3种。1×1卷积是使用有一个输出通道的普通卷积层来减少特征的时间通道维度。最大池化和平均池化是两个普通的池化层。时间融合模块的消融实验结果如表6所示。通过实验发现,使用平均池化能获得比其他两种方式更好的效果。平均池化与1×1卷积核和最大池化相比,成功率和精度分别高出1%、2.7%和0.9%、1.8%。实验结果表明,使用平均池化融合能得到更好的效果。
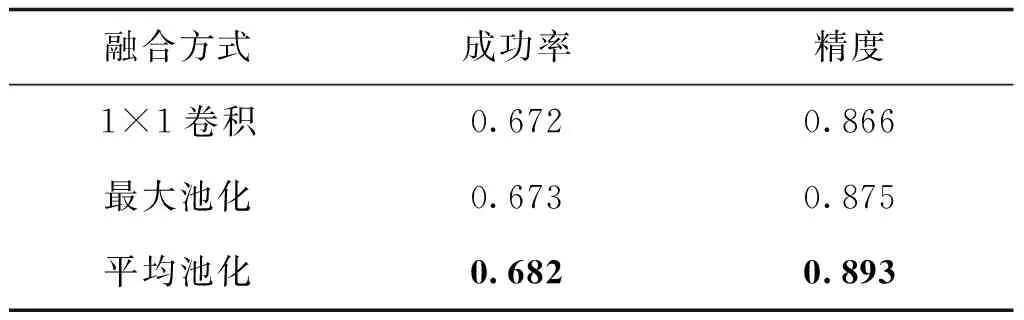
表6 时间融合模块的消融实验结果Table 6 The ablation study results of temporal fusion modules
3.3.4 模板数量的消融实验
TAN可以在一次前向推理过程中为单帧搜索区域编码多个目标模板。为此,对输入模板数量K进行了试验,对比指标为OTB100上的成功率,验证其对跟踪效果的影响。根据式(7)采样K个目标模板。当K= 1,仅使用第1帧的模板。图8展示了使用不同K值时的算法跟踪成功率(AUC)。可以看出,K值增加时,跟踪性能得到提升,并在K= 3处达到峰值,再进一步增加时,性能逐渐下降。不断增加K值导致性能变差的原因是额外的模板会带来更多干扰,这与第2.4节使用简单模板采样会引入低质量模板有密切关系。该问题将在未来工作中继续改进。因此,在对比实验中为了得到更好效果,设置K= 3。即使用中心点置信度分数能得到更好的效果。
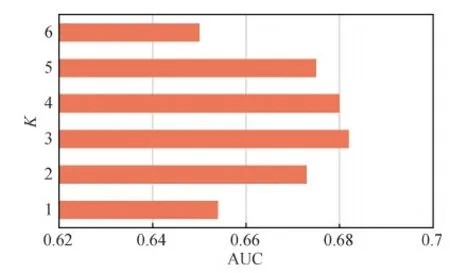
图8 输入模板数量的消融实验结果Fig.8 The results of ablation study of input template number
3.3.5 目标框选择机制的消融实验
由于网络框架输出包含中心置信度图和4个角点。4个角点分别由“左上—右下”和“右上—左下”构成两组边界框。对最终目标框的确定方式,本文尝试了3种不同方案,即4个角点的置信度均值、中心点最大置信度分数值、4个角点置信度分数和中心点置信度分数的均值。实验结果如表7所示。可以看出,通过中心点最大值能够得到最好结果。原因是4个角点的分数实际来自4个不同通道的角点热度图,这4个通道上的热度图峰值能够确定角点位置,但其具体值不在统一的尺度范围内,而中心点置信度在同一个热度图中,能够准确反映对比结果。
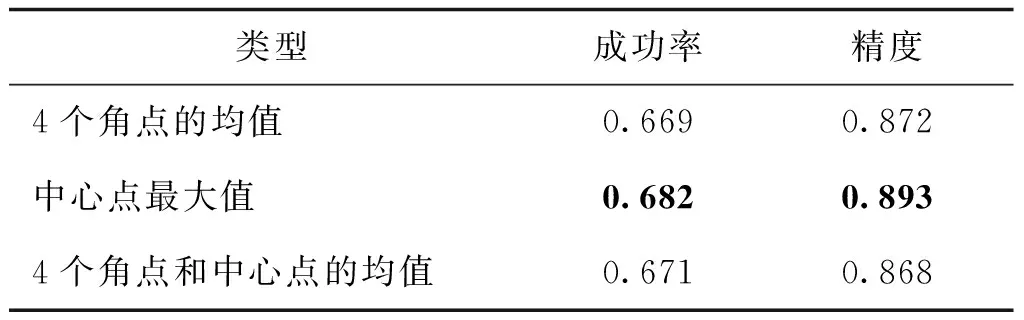
表7 目标框选择机制的消融实验结果Table 7 The ablation study results of box selection mechanism
3.3.6 速度分析
表8对比了与本文方法最相关ROAM、ATOM和DiMP18等方法在速度—精度上的表现。这3种方法与本文方法出发点一致,都试图解决对历史目标跟踪结果的利用,提出了不同的网络结构来提取时序特征。从表8可以看出,ROAM虽然达到了与TAN相当的精度,但速度比TAN慢了4.3倍。ATOM与DiMP18虽然使用与TAN一样的基础网络ResNet-18,但TAN在精度和速度上均明显占优。这3种方法都依赖在线网络微调改善对目标特征变化的适配性,而TAN无需依赖在线模型更新,可以在一次前向推理过程中为目标编码多个目标模板,因此整体跟踪过程是一个纯推理过程,在保证速度的同时可以取得较好的跟踪精度,能够达到速度与精度的平衡。
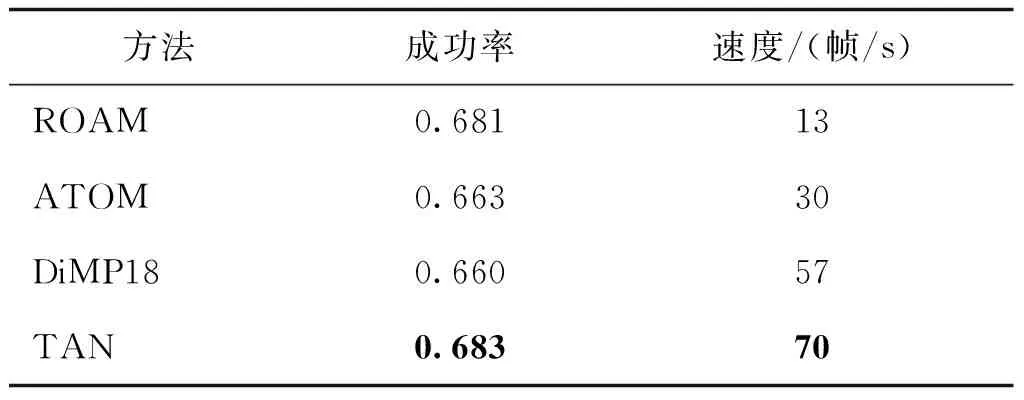
表8 不同方法的速度与精度分析结果Table 8 The results of success and speed for different methods
4 结 论
从简单实用和轻量级角度出发,通过使用视频时序特性中的时序外观一致性,提出一种新颖有效的跟踪器,设计新的时间感知网络TAN,通过提出的时间聚合模块提取时空特征,交换和融合来自不同历史帧的信息。同时,设计一个简单有效的目标估计策略检测目标的4个角点,并基于中心点置信分数机制确定最终目标框。本文提出的跟踪器完全离线训练,在前向推理中完全不需要任何在线模型更新策略,能够适应目标的外观变化。在实验中,相比其他轻量级的跟踪器,TAN不包含复杂的性能提升策略,以70帧/s的速度实现了更优或相当的性能。本文工作为单目标跟踪提供了一个新的研究视角,若结合使用跟踪领域常用的模型更新、目标重检测等策略,可进一步增强提出的跟踪框架性能。同时,本文工作也存在提升空间,未来将从更好的时间聚合模块设计、更强的目标估计策略、更好的存储库维护和更新机制以及有效的模型更新策略等方面进行改进。
