适用于高海况的智能搜救艇研究
2022-09-13林玉璋刘森林刘伟平
林玉璋,刘森林,刘伟平
(天海融合防务装备技术股份有限公司,上海 201612)
1 前言
针对海上恶劣环境导致救援人员难以到达现场的难题,以及救援时间紧迫的需求,利用现有技术基础,开展海上无人智能救援装备及相关配置仪器的实用化研究。重点突破搜救艇的抗风浪自主导控、目标快速定位与漂移预测、恶劣海况下遥控救助等关键技术,大幅提升我国海上应急无人智能搜救力量。
失事后的生命搜救,关键在于实现五急:急找、急估、急到、急救、急返。智能搜救艇是急救环节的核心装备,具有适应高海况的艇型,集成救助吊篮、抛缆云台、收缆绞车、摄像系统、数据传输系统、基础生命支持等各项智能遥控设备。
当智能搜救艇接近救助目标后,先抛射救生缆让目标靠近,再利用柔性救助系统将目标转移上船:对于有人的无动力救生筏,抛拖带缆并将缆绳固定,通过搜救艇上的绞车将其拖带返航;对于落水人员,抛救生缆,呼叫落水人员将缆绑在腰上,用收缆绞车拉至救助吊篮转移上船,提供保暖、供氧、营养等生命支持。
2 船舶简介
该智能搜救艇(以下简称本艇)的设计、建造参考《国际救生设备规则》(LSA)的要求,结构满足CCS《游艇入级与建造规范》(2012)对玻璃钢艇的要求,稳性满足中国海事局《沿海小型船舶检验技术规则2016》的相关要求。
本艇采用快速救助艇的船型,装有智能搜救系统集成与监控设备,艇体为玻璃钢结构,中部设置有柴油发动机,尾部设有喷水推进装置、自扶正装置,可适应恶劣海况。
本艇艇体长5.67 m、宽2.02 m、深0.97 m、吃水0.5 m、满载排水量约3 t;主机功率96 kW;在高海况下具有正常航行的能力,航速约4 kn,在静水中航速不小于10 kn,续航力不小于50 km。
本艇结构采用优质树脂及玻璃纤维增强材料,艇体、甲板、甲板室采用玻璃钢模具成型;肋骨、实肋板等骨架芯材采用聚氨酯泡沫;在局部应力较大的部位,如尾封板等处进行局部结构加强;本艇艇体、舾装及设备的安装,具有高强度和抗风浪的能力,满足高海况的要求。
本艇两侧设有护舷,艇尾上方设有自扶正装置;其框架由钢管制成,浮体采用充气气囊,使用时可自动张开;在艇的首部布置有数据传输天线,中前区域布置2 个救生吊篮,在吊篮下方设有2 台救生牵引用收缆绞车; 2 套抛缆云台布置在尾部两侧,抛缆绳与收缆绞车相连,实现抛缆和收缆功能。当搜救艇到达救生区域时,由云台抛绳装置抛出救生缆绳,同时下放救助吊篮,落水人员抓住救生缆绳后,由收缆绞车拖到搜救艇旁边,在绞车的协助下将落水人员拖到吊篮上,然后通过救助吊篮将落水人员运转到艇甲板面。本艇的总布置图,如图1 所示。
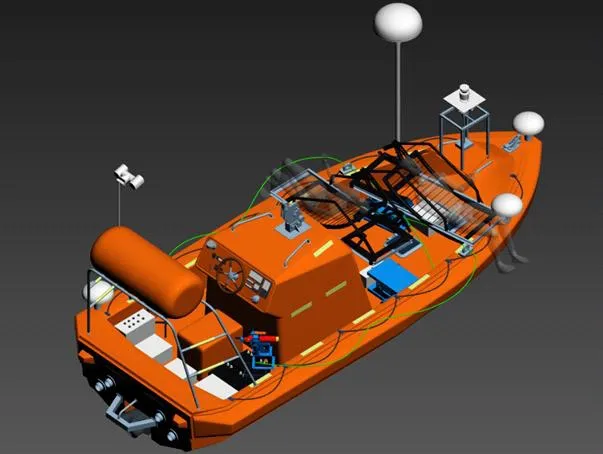
图 1 智能搜救艇总体布置图
3 稳性
本艇需在恶劣海况中进行搜救行动,自扶正能力是安全救生的必备能力,即艇体在恶劣海况下能够自身扶正维持不沉不翻,确保安全救生。
本艇翻转倒扣180°可以自动翻转扶正到0°初始状态,即具有自扶正功能。其复原力臂GZ 曲线图,如图2 所示:在翻转180°时,由于风浪作用浮心偏离重心,浮力与重力又重新形成力偶使艇继续翻转,直至浮心与重心重新达到同一垂线,最终艇回复到初始正浮的位置。
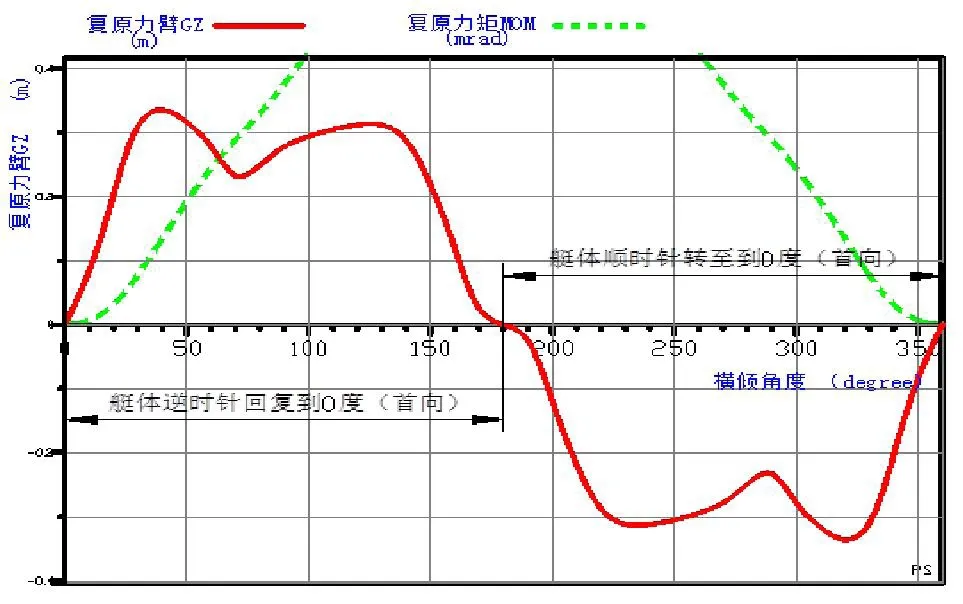
图2 复原力臂曲线图
根据对自扶正时间的计算,其时间T 与横倾角的关系,如图3 所示。
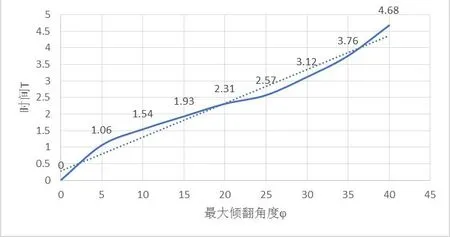
图3 自扶正时间图
4 动力系统
本艇选用柴油机作为推进动力源,相比于电池储能等其他动力源,柴油机具有功率大、响应速度快、适应恶劣工况等特点。
本艇的主机选用适用于高海况的高速柴油机,功率96 kW。如果航行时本艇发生一定角度的纵倾和横倾,柴油机内设置的传感器感知到姿态发生变化,会给出停机信号自动停机;柴油机姿态恢复后,内置传感器感知到姿态恢复正常,会给出起机信号自动重新起动柴油机。
本艇采用喷水推进,相比于螺旋桨推进、喷水推进,其结构简单,操作灵活,不易对获救人员造成二次伤害。
本艇的任务设备,如救助吊篮、抛缆云台、收缆绞车都包含液压执行机构,在机舱设置液压泵站为上述设备提供液压源;主机通过轴系驱动喷泵,轴系上设置PTO 驱动液压泵站的液压泵。
表1 为“柴油机+喷泵”与“电池储能+电推”两种推进形式的对比。
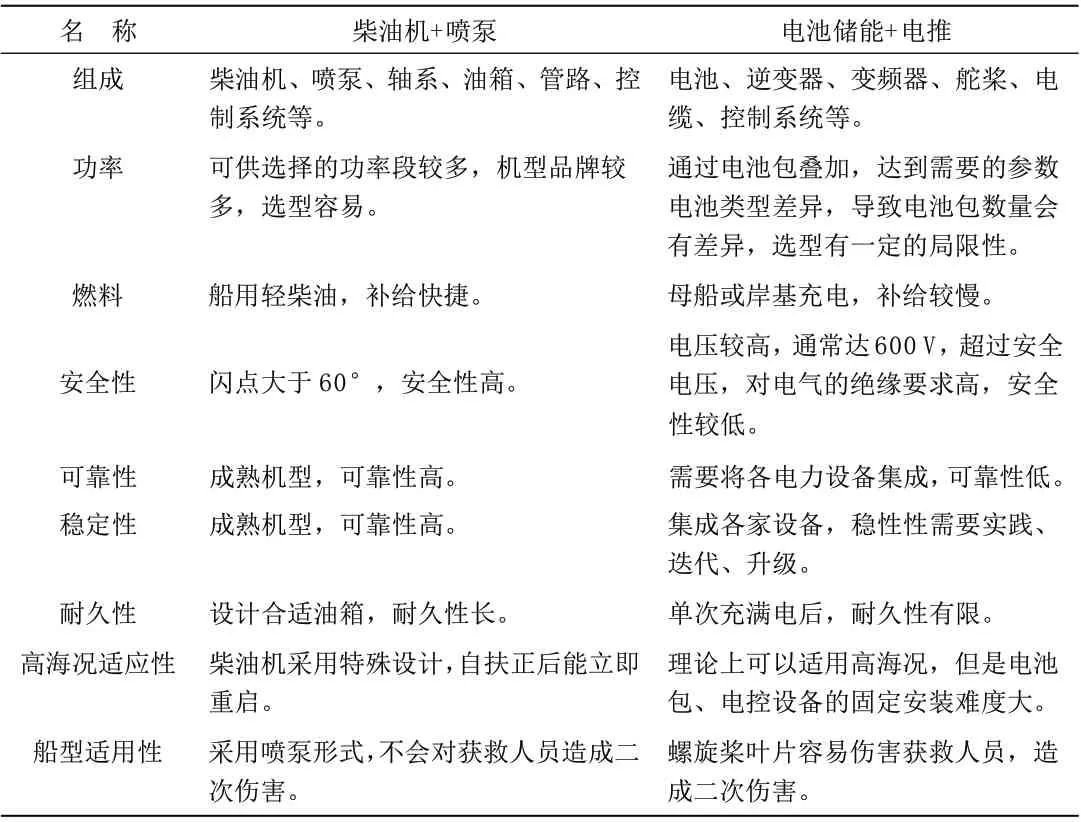
表1 两种推进形式对比
5 任务设备
(1)抛缆云台
抛缆云台将气动抛缆器和二自由度云台集成在搜救母船的船尾,主要针对有生命意识的落水人员。抛出缆绳后,落水人员将缆绳固定,由搜救艇绞车、吊篮拖回搜救艇甲板上;气动抛缆器自带高压气瓶,通过液压油缸遥控扳机,切换气路,抛射带细缆的橡胶弹头;细缆的另一端是收缆绞车。图4 为抛缆云台三维图。
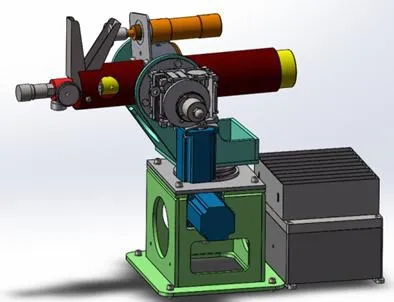
图 4 抛缆云台
(2)收缆绞车
采用变量马达驱动单卷筒,通过自动排缆机构将抛出去的缆绳有序地排列在卷筒上,将目标物体拉回到搜救艇附近;自动排缆采用链传动,带动往复丝杆进行布缆,如图5 所示。
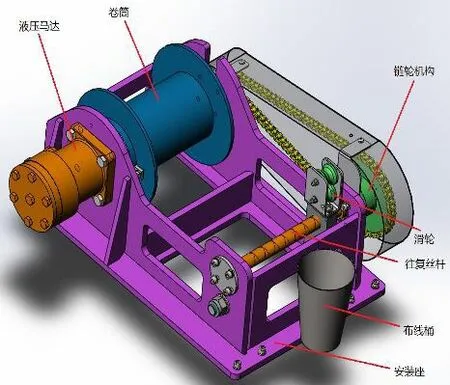
图 5 收缆绞车
(3)救助吊篮
救助吊篮安装在搜救艇前端两侧,采用四个油缸控制收放装置运动,如图6 所示:吊篮伸出船舷外,落水人员拉到吊篮上,吊篮升起把落水人员营救到搜救艇上。
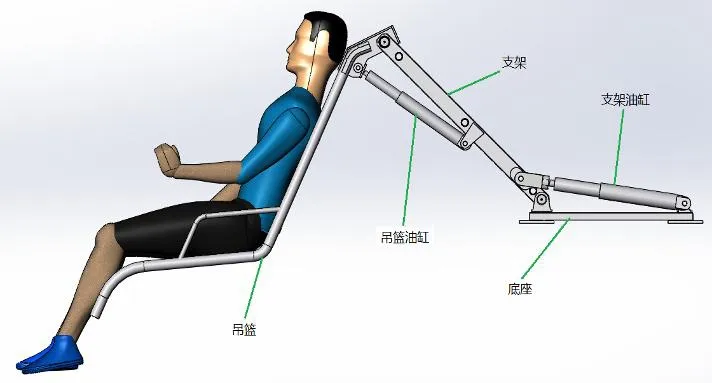
图 6 吊篮装置救援伸出状态
(4)电控系统
电控系统主要通过定位系统、搜寻系统及数据传输系统实现航路规划与实时避障,进而实现辅助母船进行海面落水人员的远程施救工作。其中:(1)定位系统,采用新型的无线超宽带定位技术,基站安装在母船,信标安装在搜救艇,可全方位测量搜救艇的精确相对位置;(2)搜寻系统,配置四台高精度摄像头及一台激光雷达,摄像头采用三轴防抖稳态,以保持画面的稳定性;基于搜寻设备图像信息的融合结果,凝炼背景与目标信息,快速重构失事海域的动、静背景,定位失事目标,预测目标漂移的速度方向,评估涌浪变化趋势,进行全局路径规划和局部路径修正,实时调整搜救艇的路径,控制搜救艇救生全程迎浪前进、高效往返;(3)数据传输系统,采用高精度的无线图传模块,保证搜救艇与母船之间的高速、远距离、实时的无线视频与数据混合传输;建立搜救艇与母船、岸基指挥部间的信息纽带,同时与多站点进行数据传输,接收母船遥控指令和搜救艇周转的环境信息,上传搜救艇位姿信息,缩短延时,共享搜救信息,扩大工作范围,提高通讯可靠性,实现搜救信息的实时广播,保障搜救艇的安全性、可控性和搜救效果。
6 结语
智能搜救系统中的装备必须具有以下能力:快速定位目标,预测涌浪变化趋势;对抗强风、巨浪快速接近目标,配置生命维持、柔性救助等装置;稳定可靠的通讯、运输和收放能力。
基于智能无人搜救艇等海上救助作业平台,集成无人机、雷达、红外光电、北斗示位标、激光雷达等搜寻定位设备,以及抛缆云台、救助吊篮、保暖、供氧、营养等救助与生命保护设备;通过多设备的协同搜寻、图像融合、动静背景重构、目标识别与定位,实现综合监视;远程控制多套救助设备协同救助;最终建立基于无人机→岸基指挥部→救助船→搜救艇的联合智能搜救系统,能在岸、船基监控干预下,在高海况下自主释放智能无人搜救艇,搜救目标、自主回收、快速撤离。本艇于2021 年9 月交付,并在海上救助部门示范应用。
