基于太阳能的智能垃圾分类箱设计研究
2022-08-26白一秀张海燕邵莹房磊
白一秀,张海燕,邵莹,房磊
(1.甘肃建筑职业技术学院,甘肃 兰州 730050;2.兰州交通大学,甘肃 兰州 730070)
0 引 言
近年来,政府对于垃圾分类越来越重视,并出台了一系列关于促进垃圾分类回收的政策,号召人们养成垃圾分类的习惯。日常生活中产生的垃圾里面包含了很多可回收物,将这一部分垃圾进行分类之后可以回收很多资源。传统的回收方式需要大量的人力资源,虽然这些垃圾重新变成了资源,但是在整个过程中消耗的资源也非常多。当前,我们处在一个传感器技术快速革新的时代,由单片机控制的各类自动化装置已经在各行各业中崭露头角。就在2021年的两会上,“碳达峰”“碳中和”被首次写进政府工作报告中,意味着在以后的发展中,新能源必定有着举足轻重的地位。那么将新能源、单片机控制以及垃圾分类相结合的基于太阳能的智能垃圾分类箱就有着很好的发展前景。
本设计研发了一种基于太阳能的智能垃圾分类箱,设计了各部分电路图、原理图,在Proteus软件中做了仿真设计。它是由太阳能供电单元,STC89C52单片机构成的中央处理单元,各类传感器构成的识别单元,步进电机构成的执行单元和LCD1602液晶及各类指示灯构成的显示单元所组成。当用户投放垃圾的时候,识别单元检测出垃圾种类,并给单片机输出电平信号,单片机执行程序,控制步进电机旋转一定角度,将垃圾投入到对应的垃圾箱中,指示灯显示垃圾的种类,用户在看到垃圾种类后也能增长他们对于垃圾分类的知识。就此整个垃圾分类过程完成。
1 整体方案设计
本文设计的基于太阳能的智能垃圾分类箱主要包括以下功能:太阳能配合蓄电池为系统供电、垃圾箱满自动报警、智能垃圾分类等。实现以上这些功能可以使用户方便投放垃圾,提高垃圾回收的效率。而且是太阳能供电对环境无污染,垃圾桶满报警可以使垃圾得到及时的处理。
本设计使用STC89C52单片机为中央处理单元,多种传感器组成智能识别单元,单片机通过控制步进电机旋转角度将垃圾精确的投入与其对应的垃圾箱。此外,超声波测距模块可以测量垃圾距离垃圾桶盖之间的距离,小于10 cm报警。另外就是对供电电路和充放电电路进行了设计。设计框图如图1所示。
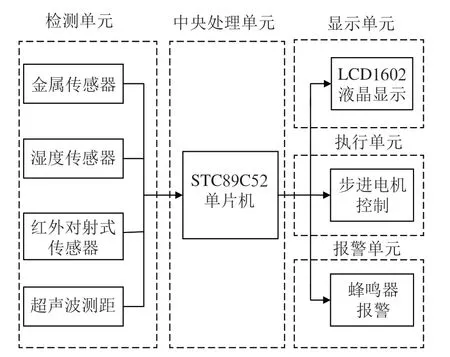
图1 总体设计框图
2 外观设计
垃圾在智能垃圾桶中的走向是,用户将垃圾投入到垃圾投放口中,经过一个装设了多种传感器的通道,当垃圾到达旋转盘的时候,传感器完成对垃圾的识别,单片机执行程序控制步进电机带动旋转盘将垃圾运输到对应垃圾桶的上方,并将垃圾投入到垃圾桶中。智能垃圾桶外观设计图如图2所示。
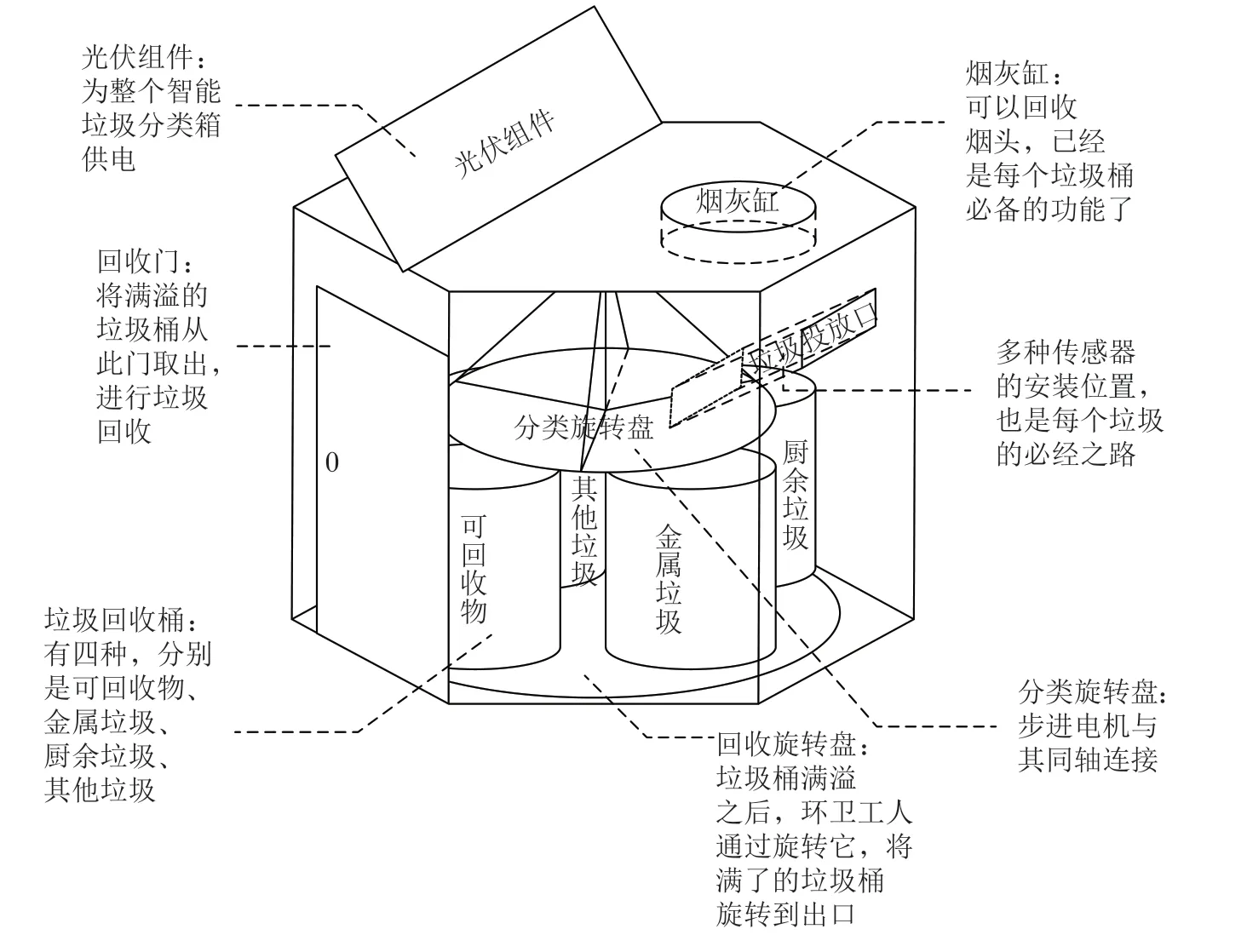
图2 智能垃圾桶外观设计图
3 硬件设计
3.1 电源电路的设计
电源电路使用了LM2596-5芯片进行降压操作。LM2596-5是一种经常被采用的开关电源芯片,其使用广泛,价格便宜。12 V电压电源通过IN端输入芯片,输出端有两个电容,一个470μF的电容和一个105 μF电容。它们的作用是进一步过滤没用的波形,使得到的5 V电压更加稳定,电路中还有一个发光二极管,在电路中起指示作用。该电路转换效率高,一般在80%~90%之间。
3.2 检测单元的选型与设计
金属检测模块的选型与设计:在我们投放垃圾的时候金属探测器就会开始检测投放的垃圾中是否有金属,如果有金属的话金属检测模块将信号传递给单片机,单片机执行程序后控制步进电机旋转一定角度实现对金属垃圾进行分类。选型:在本设计中选用一块六反相器数字集成电路来检测识别金属垃圾。金属物体一旦接近探头使得信号产生谐波,从而导致振荡电路的振幅改变,检测电路通过检测振幅的变化来检测是否为金属垃圾。探头的原理:通电导线周围能产生磁场,被测物体通过时,若在物体之中能感应出涡流,其中的涡流便会逆向作用于探头。使得探头振荡器的振幅变小,通过对振幅的检测就能实现金属垃圾的检测。
含水量检测模块的选型与设计:为了区别是否是厨余垃圾,本文采用含水量传感器进行识别。一般厨余垃圾含水量都比较高,所以当含水量达到一定值时通过LM393比较器就可以进行判断。选型:使用Water sensor传感器作为厨余垃圾的检测探头,当有厨余垃圾接触到湿度检测探头时,传感器感应到水分,便输出一个信号,单片机执行程序,将厨余垃圾进行分类。使用LM393比较器作为含水量的检测部分。
透明度检测模块的选型与设计:本次设计第三道关口是检测垃圾的透明度,如果是透明垃圾不外乎就是塑料及玻璃,塑料及玻璃都是可回收物,单片机执行程序将垃圾投入可回收物对应的垃圾箱中。如果不是透明的垃圾,就将此垃圾判定为其他垃圾类型,将垃圾投入其他垃圾对应的垃圾箱。本设计选用HD-DS25-5MM型号的红外对射式传感器,其可以检测25 cm以内的物体,适合本次设计需求。
超声波测距模块的选型与设计:超声波测距模块对环境要求不高,由于超声波装置安装在桶内,所以基本不受外界环境因素干扰。选型:本次设计选择使用一款经典超声波测距模块来测量垃圾距离垃圾桶盖的距离,它的型号为HC-SRO4。这款超声波测距模块有四个引脚,1引脚接直流5 V电源;2引脚接收来自单片机的“开始测距”的信号;3引脚是输出超声波测距模块状态的引脚;4引脚接地。2引脚接单片机的P3.3引脚;3引脚接单片机的P2.2引脚。
3.3 供电电路的计算与设计
3.3.1 蓄电池容量计算
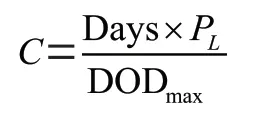
蓄电池容量的估算:日负载耗电量乘以连续阴雨天数就等于初步的蓄电池容量。
蓄电池在恶劣天气情况及连续阴雨天的时候完全放电会对蓄电池产生致命危害,蓄电池寿命将大大缩短。所以蓄电池容量在计算时,要考虑到蓄电池的允许最大放电深度对于蓄电池容量设计计算的影响。本次设计选择80%放电深度(DOD)。蓄电池容量的基本公式为:
计算串并联蓄电池个数:
(1)串联的蓄电池的个数(N)的计算:
其中U表示负载的标称电压,U表示蓄电池的标称电压。
(2)并联蓄电池数的个数(N)的计算:
其中表示蓄电池容量,表示单独一块蓄电池的容量。
负载日平均工作时间为10 h,系统功率为50 W,计算得到日平均负载耗电量为500 Wh/天,取兰州最长阴雨天平均值10天,蓄电池输出电压为12 V,最大放电深度80%。
带入本次设计的各项参数得:
选用2 V/300 Ah()的蓄电池。并联组数取整为2,所以,所需蓄电池个数为:
=6×2=12
3.3.2 光伏组件功率计算
光伏组件功率计算包括:
(1)光伏组件的估算。光伏组件在设计时的原则是能供给年平均负载的正常运行,光伏组件的数量计算就是用负载每天的耗电量除以单独一块太阳能电池板的日发电量,得到光伏组件并联的数量。负载的电流供应就是靠这些太阳能电池板并联运行。光伏组件串联的数目就是负载和光伏组件的标称电压之比。
(2)设计修正。在实际工作过程中,有很多因素影响光伏发电的效率,例如太阳辐射量、安装方式、光伏组件的功率衰减等。所以,为了满足负载的用电需求,将设计过程加以修正。
(3)修正后计算过程。某地区平均最低日照辐射3 kW h/m,也就是3个标准峰值小时,前面说了,对于一个标准的75 W太阳能光伏组件来说,每天的输出为:
组件日输出=3.0峰值小时×4.4 A=13.2 Ah
蓄电池库伦效率为90%,光伏组件输出衰减10%。

带入数值得:
并联组数取整为4。
带入数值得:

所以选标准75 W的光伏组件,总共需要4块。
3.3.3 蓄电池充放电电路设计
本次设计的充放电电路主要由蓄电池充放电回路、充电比较电路、放电比较电路、充电控制电路、放电控制电路和稳压电路所组成。电路图如图3所示。
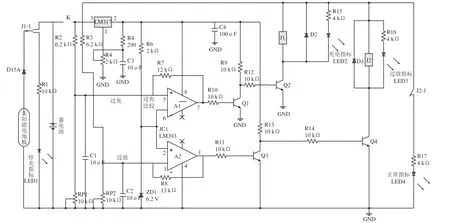
图3 蓄电池充放电电路原理图
(1)蓄电池充放电回路。蓄电池充放电回路中包含了光伏电池板、蓄电池以及继电器。如图3所示,当继电器J1得到正向电压,则J1-1开关连接蓄电池导通,光伏电池板给蓄电池充电。如果继电器J1无正向电压,则J1-1开关与电阻R1及LED1导通,不给蓄电池充电,LED1指示灯点亮,表示不充电。
(2)充电比较电路。采集电路得到的信息经过电阻R2输入比较器同向端中,基准电压输入比较器反向端。比较器将该信息与基准电压相比较。
当电池电压大于13.5 V时,比较器输出高电平信号。充电控制电路接收到高电平信号后,控制充电回路断开。
当电池电压小于13.1 V时,比较器输出低电平信号。充电控制电路接收到低电平信号后,控制充电回路闭合。
(3)放电比较电路。采集电路得到的信息经过电阻R3输入比较器同向端中,基准电压输入比较器反向端。比较器将该信息与基准电压相比较。
当电池电压小于10.8时,比较器输出低电平信号。放电控制电路接收到低电平信号后,器控制放电回路断开。当电池电压大于12.1时,比较器输出高电平信号。放电控制电路接收到高电平信号后,其控制放电回路闭合。
3.3.4 显示电路设计
本次设计选择的是一款制作各类单片机设计经常会用到的显示屏LCD1602。它是一种专门用于显示各类字母、符号及数字的显示屏。型号中的1 602代表的就是它能显示的字符量,即显示两行字符,且每行能显示16个字符,很适合本次设计。
4 步进电机控制策略设计
4.1 转动角度控制设计
电机转动角度的控制主要是由于传感器判断识别垃圾种类之后,给予单片机一个对应垃圾种类的电平信号。有了这个电平信号之后,单片机执行程序,输出对应垃圾种类的脉冲数。通过步进电机驱动器接收方波数信号,控制步进电机旋转此垃圾对应的角度,完成垃圾分类任务。
需要判定四种垃圾种类,所以产生的方波数有四种,计算过程为:
选择步距为1.8°的电机,采用1/4步驱动,得:
其中,为需要电机旋转角度,为需要的脉冲数。
我们需要步进电机旋转的角度分别是60°、120°、160°和240°。代入上式得到我们的脉冲数为:旋转60°需要133个脉冲,旋转120°需要266个脉冲,旋转160°需要355个脉冲,旋转240°需要533个脉冲,只要步进电机驱动器收到对应的脉冲数,就能对步进电机进行精准的控制。
4.2 控制电路设计
本次设计采用的是用L297和L298组成的步进电机驱动电路。其原理图如图4所示。
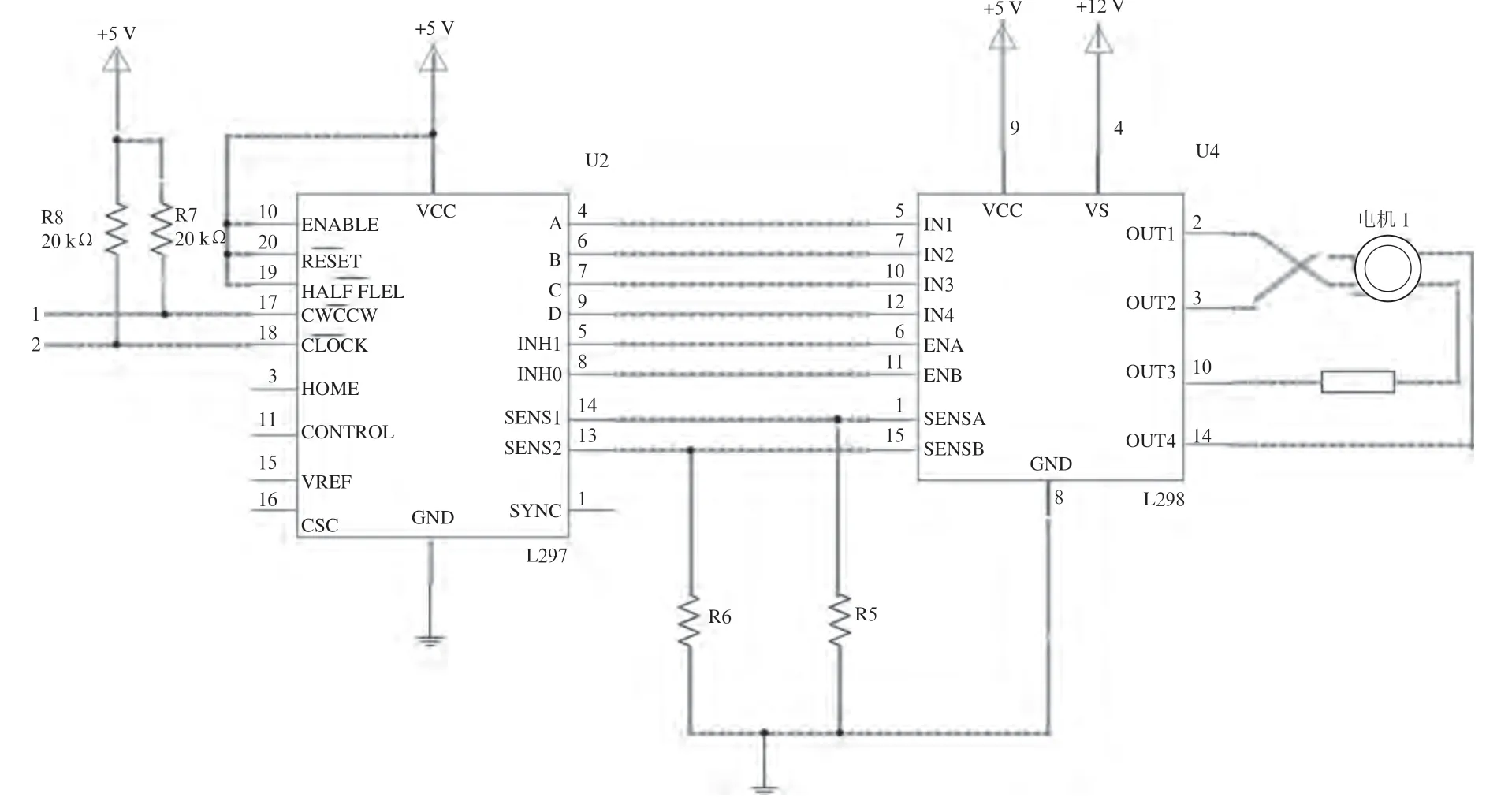
图4 电机驱动电路原理图
从上图中可以看出,L297与单片机之间只有两处连接,CCW和CLOCK。其中单片机通过CCW控制步进电机方向,通过CLOCK的时钟信号控制步进电机的速度。
5 系统仿真
仿真总图如图5所示。
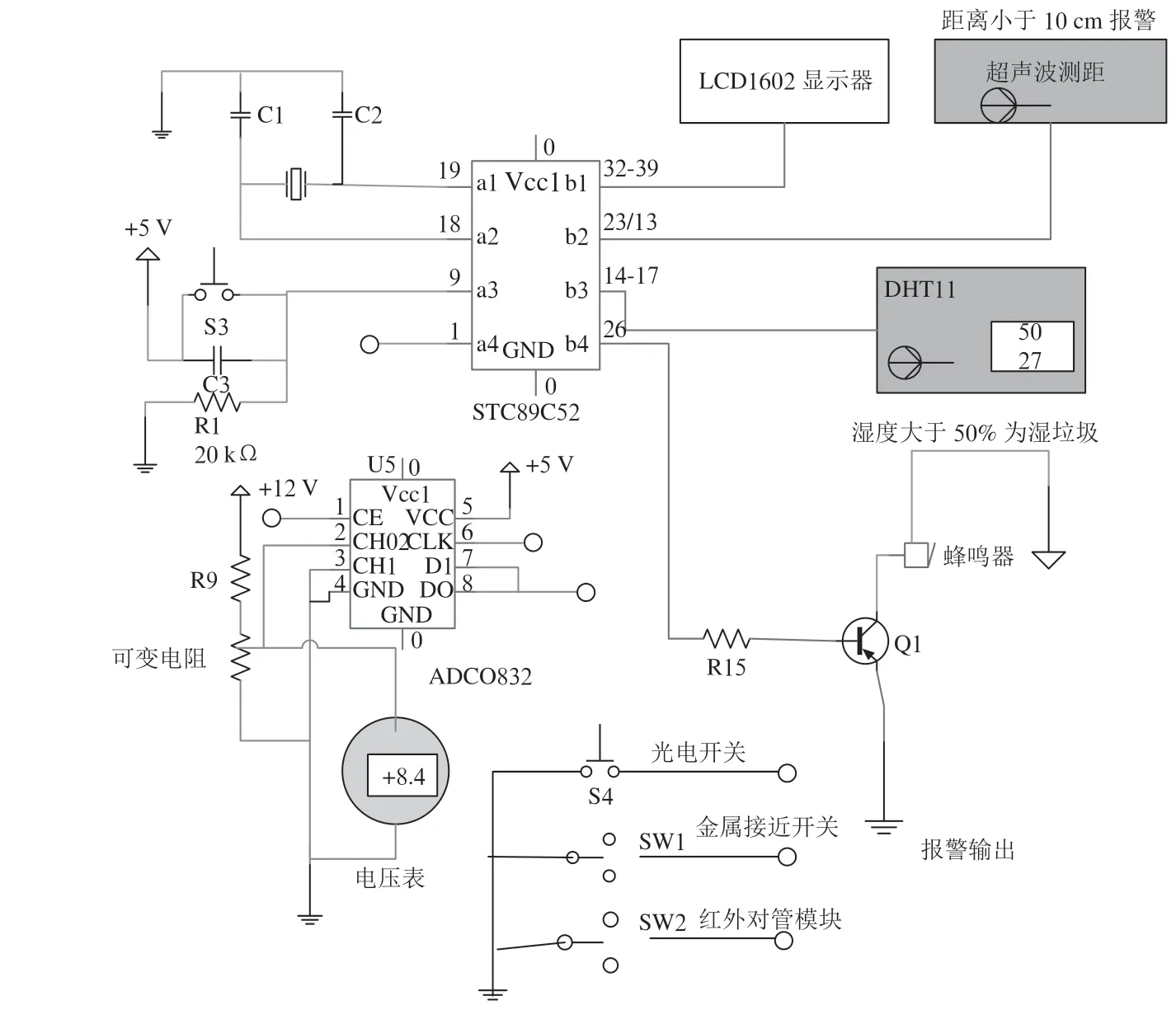
图5 仿真总图
总仿真图基本实现本设计的大部分功能。分别是传感器模块、超声波测距模块、步进电机驱动模块、蜂鸣器报警模块以及LCD1602液晶显示器仿真模块。
6 结 论
设计了太阳能供电电路及蓄电池充放电电路,并对光伏组件及蓄电池容量进行了设计计算。在智能识别单元中,设计了多种传感器的硬件电路,通过传感器检测垃圾的湿度,金属性和透明度等信息来识别垃圾的种类。在中央处理单元中,选择了STC89C52单片机,设计了单片机最小系统电路,复位电路及晶振电路。由于本设计处于垃圾桶内部,所以选择了上电复位。通过软件Keil4设计了各类元器件的程序,包括单片机、超声波、LCD1602液晶显示和步进电机驱动器。在Proteus中完成了整个系统的仿真搭建,由于部分传感器在仿真元件库中没有,所以就用开关代替这部分传感器。通过观察步进电机的旋转角度,证明本次仿真电路搭建及程序设计运行良好。