基于多阈值判断的单线激光雷达草丛识别方法
2022-08-24龚鹏徐勤博张晏悦姬书得
龚鹏, 徐勤博, 张晏悦, 姬书得
(1.沈阳航空航天大学机电工程学院, 沈阳 110136; 2.沈阳航空航天大学航空宇航学院, 沈阳 110136)
从目前智能驾驶领域的发展情况来看,无人驾驶是发展的热门方向[1-5]。在无人驾驶这一研究框架下,无人车辆在行驶过程中的障碍物识别是研究的重点。目前的主流研究是结构化路面的障碍物检测,在非结构化道路(如越野路面)障碍物检测方面,草丛、树枝等柔性障碍物识别是不可避免的,而且有较高的技术难度。在无人车辆避障系统中,有效的识别出草丛等障碍物(可通过或不可通过)会给避障决策提供更多有效、准确的信息。基于单目相机[6]的视觉识别有着诸多优势,成本低、配置与标定简易,能够提供较为丰富的环境信息,但是单目相机的最大缺点是对环境光照特别敏感,极容易受到天气、环境光等影响,当环境光照比较强(会出现过度曝光)或较暗时,会使视觉识别的准确性与检测速度急剧下降[7-10]。相比于视觉识别来说,激光雷达可以获得极高的角度、距离和速度分辨率,具有抗有源干扰能力强、体积小、质量轻等优势[10-11]。目前中外无人驾驶领域对于单线激光雷达的应用主要在障碍物测距、测速等基础领域,对草丛等柔性障碍物识别的研究很少。刘乐等[2]利用两个单线激光雷达对静止或移动障碍物进行识别判定,李侨辉等[12]通过对激光雷达放置不同俯仰角测取数据,再采用贝叶斯概率法对草丛障碍物进行识别,识别效率低。
为此,基于单线激光雷达开展对草丛障碍物的识别研究,以单线激光雷达采集的点云为原始数据,通过多阈值草丛识别算法对点云数据进行处理、识别,识别结果将对无人驾驶技术提供更好的帮助和借鉴意见。
1 基于单线激光雷达的草丛特征分析
1.1 激光雷达的选型
激光雷达分为两种类型,多线激光雷达和单线激光雷达。多线激光雷达在障碍物检测上有着诸多优势,可以对障碍物进行更好的建模,但同时多线激光雷达的点云数据庞大、成像速度慢、处理时间长。相比之下,单线激光雷达点云数据量小,处理时间短、成像速度快,有着较强的鲁棒性、实时性,并且单线激光雷达在成本上相比多线激光雷达也有着较大优势,因此选用单线激光雷达作为草丛识别传感器。单线激光雷达的参数如表1所示。

表1 RPLIDAR S1的技术参数Table 1 Technical parameters of RPLIDAR S1
1.2 草丛特征分析
通过分析草丛激光雷达点云深度信息的分布规律,对原始点云信息进行处理,最终实现草丛特征的判断。
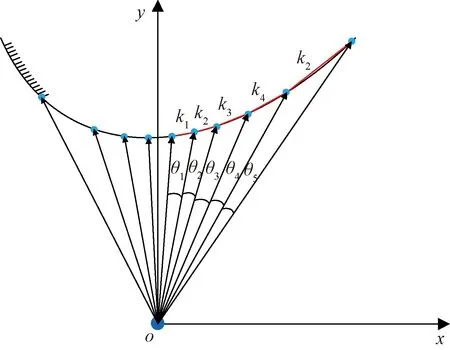
当单线激光雷达扫描在草丛侧面时,有一部分扫描线打在靠前草叶的表面,另一部分扫描线打在更深处的草叶表面,即雷达点云数据具有不同的深度信息。单线激光雷达的草丛扫描示意图如图1所示。

Deepi为单线激光雷达的第i条扫描线; 相邻两条扫描线之间的夹角为θi图1 激光雷达草丛扫描示意图Fig.1 Diagram of grass by LiDAR scan
从扫描示意图(图1)可以观察出,打在草丛上的点云是错落无序的,点云深度变化较大。
对于地面、石头、墙体建筑物等连续体障碍物来说,如图2、图3所示,当单线激光雷达扫描到其上时,相邻两个点云之间的深度不会有很大的变化。这两种截然不同的深度特征变化规律信息可以将草丛和其他刚体障碍物区分开。
由图3、图4可以看出,随着单线激光雷达向两侧扫描,障碍物距离激光雷达中心越来越远时,扫描线的长度也会急剧增加,因此对草丛进行检测识别时,如果只将深度变化作为判定依据,容易造成准确性的下降。因此不只是将深度信息变化作为判定唯一依据,还将相应角度信息作为判定依据,得到相邻激光点云之间的斜率信息,对斜率信息的分析结果作为草丛判定的依据。
单线激光雷达点云数据的存储形式为极坐标系形式,因此从单线激光雷达点云原始数据可以获取每一个点云的极径和极角。
设扫描一周的扫描线数目为m,则点云数据的极径矩阵、极角矩阵分别为
ρ=[ρ1,ρ2,…,ρm-1,ρm]
(1)
θ=[θ1,θ2,…,θm-1,θm]
(2)

图2 墙体连续体扫描示意图Fig.2 Schematic diagram of wall continuum scan
θi为相邻两条扫描线之间的夹角;ki为相邻两点云间的斜率值图3 圆柱连续体扫描示意图Fig.3 Schematic diagram of cylindrical continuum scan
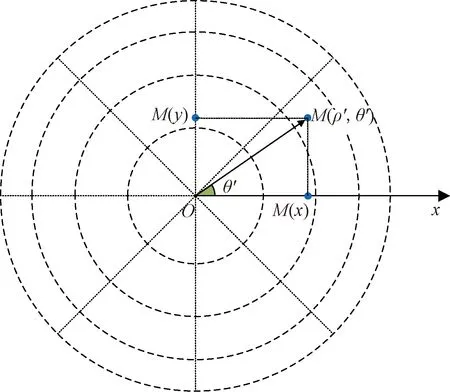
图4 极坐标示意图Fig.4 Polar Coordinate System diagram
式中:ρm为第m条扫描线的极径;θm为第m条与m-1条扫描线所夹的夹角;ρ为单线激光雷达点云极径矩阵;θ为单线激光雷达点云极角矩阵。
2 草丛点云数据的分析
2.1 极坐标与笛卡尔坐标的转化
极坐标系是指在平面内由极点、极轴和极径组成的坐标系。在平面上取一点O,称为极点。从O出发引一条射线Ox,称为极轴。再取定一个单位长度,通常规定角度取逆时针方向为正,如图5所示,平面上任一点M的位置就可以用线段OM的长度ρ′以及从Ox到OM的角度θ′来确定,有序数对(ρ′,θ′)称为M点的极坐标,记作M(ρ′,θ′),其中,ρ′为M点的极径,θ′为M点的极角。

Mi(ρi,θi)为点云的极坐标; Mi(xi)、Mi(yi)分别为点云极 坐标转换到笛卡尔坐标后的横坐标值和纵坐标值; Δx、Δy分别为两点云在x方向差值和两点云在 y轴方向差值;ki为相邻两点云间的斜率值图5 草丛点云特征几何关系图Fig.5 Geometric relation diagram of grass point cloud features
在极坐标系中,以O为原点,Ox为x轴正方向建立平面笛卡尔坐标系xOy。点M分别向x轴、y轴投影,由几何关系可得

(3)
则转换的笛卡尔为M(ρ′cosθ′,ρ′sinθ′)。
2.2 点云原始数据坐标的转化
由上节极坐标与笛卡尔坐标的转化关系,如图6所示,以草丛点云分析为例,Mi(ρi,θi)表示点云数据中任意一个点的极坐标,其笛卡尔坐标为
xi=ρicosθi
(4)
yi=ρisinθi
(5)
则由此可以得到任意点云的笛卡尔坐标Mi(xi,yi)。在笛卡尔坐标系xOy中,点Mi、Mi+1在x轴、y轴方向的差值分别为
Δxi=ρicosθi-ρi+1cosθi+1
(6)
Δyi=ρisinθi-ρi+1sinθi+1
(7)
将Mi、Mi+1连接(图6中的红色箭头线),则相邻两点Mi、Mi+1连接线的斜率为
(8)
式(8)中:Δxi、Δyi分别为点Mi、Mi+1在x轴、y轴方向的差值。
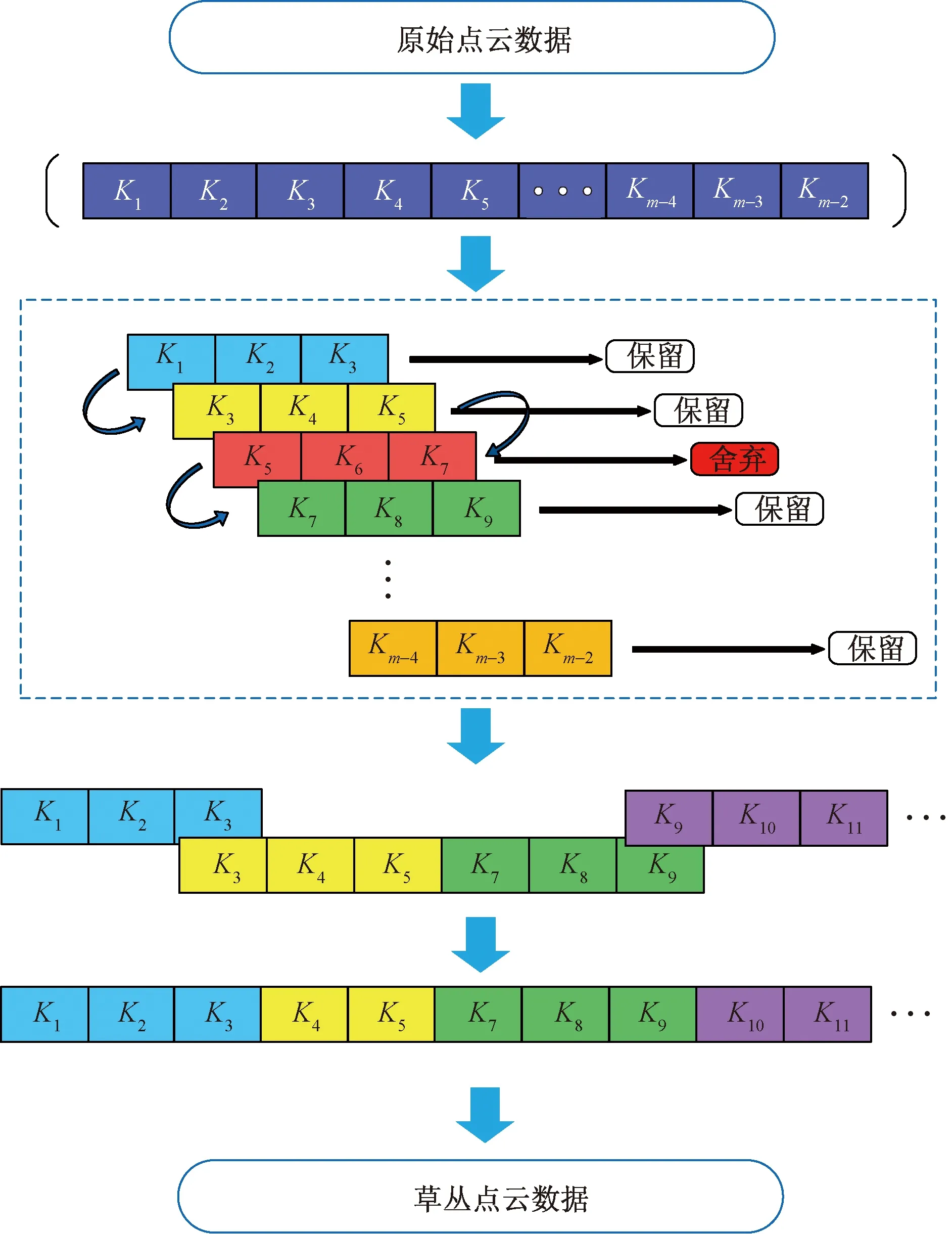
图6 候选框示意图Fig.6 Candidate box schematic
分析可知,草丛障碍物与其他障碍物的特征区别在于相邻点云之间的斜率变化。从图5中的点云连接线的斜率分布情况可以看出,从左到右,斜率不断在突变,因此相邻点云连接线的斜率差值比较大,对于其他连续体障碍物来说,斜率虽有变化,但是突变情况很少,因此对于这类障碍物的斜率差值变化就比较小。通过这一特征规律,斜率差值可以作为草丛障碍物和其他连续体障碍物的根本区别。相邻两红色连接线间的斜率差值为
Ki=|ki+1-ki|
(9)
由式(9)得到点云的斜率差值矩阵为
K=[K1,K2,…,Km-3,Km-2]
(10)
式(10)中:K为单线激光雷达点云的斜率差值矩阵。
3 多阈值草丛特征识别算法
3.1 算法描述
基于以上草丛特征和草丛点云数据的分析,提出一种多阈值草丛特征识别算法。所提算法将斜率差值信息矩阵分解为若干候选框(子集),判断每一个候选框中的斜率差信息是否满足对应阈值,若满足阈值要求则保留该候选框,若不满足,则舍弃该候选框,最终,整合保留下来的候选框,由整合的斜率差值信息所映射的点云即为草丛障碍物点云,候选框的示意图如图7所示。
3.2 算法中阈值的选择
3.2.1 候选框(子集)阈值的选取
首先,依据单线激光雷达的角度分辨率与点云数量,选取阈值A为候选框的长度,即候选框(子集)中的元素的个数为A。再选取候选框步长阈值B,即相邻两个候选框首个元素下角标之差。
3.2.2 草丛判定阈值的选取
选取草丛判定斜率阈值为Q,将候选框中的每一个元素依次与阈值Q进行比较,当元素值与阈值Q的关系满足式(10)时,即初步判定该元素符合草丛信息的特征,进行保留,累计得出该候选框中被保留元素的个数,记为W。
Ki≥Q
(11)
再选取阈值E。将上一步得到的W值与阈值E进行比较,若满足式(11)则判定该候选框中点云为草丛点云。
W≥E
(12)
基于多阈值草丛识别算法流程过程如图7所示。由于草丛形状的不规则性,当单线激光雷达扫描草丛时,会出现相邻几个点云的连线斜率差值较小的现象,此时若判定该处不是草丛,就会出现误判。因此A、B、Q、E的选取在很大程度上影响着识别结果,合理的阈值选取能够大大提高识别的准确率。

图7 多阈值草丛识别算法流程图Fig.7 Flow chart of multi-threshold grass recognition algorithm
阈值A即为候选框中斜率差值信息的个数,A值如果过大,则候选框中的元素过多,刚拾取到草丛边缘点云时的候选框会大概率不满足阈值条件而被舍弃所以容易在识别过程中导致过多损失草丛边缘,A值如果过小则会使候选框(子集)过多,计算量增大,增加处理时间。
阈值B即相邻两个候选框中首个元素下角标之差,B值如果过大则在候选框的移动时会漏掉点云。原则上B值小于等于候选框的长度A,当B值小于候选框的长度A时,虽然子集中元素会出现重叠,但是识别率会会有提升。B值过小同样会引起计算量的增加。
阈值Q、E的选取决定了草丛的最终判定,因此这两个阈值的选取需要慎重,若选取的阈值Q过大或者过小,都会导致大量的草丛点云会被舍弃,阈值E如果过大,也同样会导致含有草丛点云候选框被舍弃,造成草丛的遗漏,识别率的下降。
4 试验验证
以户外3种类型草丛作为试验对象,采用了激光波长为905 nm的RPLIDAR S1单线激光雷达作为试验设备,通过Python3.6的Pycharm平台对点云数据处理,完成草丛障碍物的识别。搭建的硬件平台设备如图8所示。
试验记录:单线激光雷达与草丛障碍物之间的距离为2 m,单线激光雷达水平高度约为1.7 m。3种类型草丛如图9所示。
针对于不同类型草丛,选取不同阈值进行草丛特征识别,各类型草丛选取阈值如表2所示。
经过单线激光雷达扫描得到的基础点云图如图10所示。
各类型草丛识别率如表3所示。将点云数据通过多阈值草丛识别算法识别后得到图11所示的最终结果。

图8 硬件平台设备Fig.8 Hardware platform equipment

图9 3种类型草丛Fig.9 Three types of grass

表2 各阈值选取值Table 2 Select values of each threshold
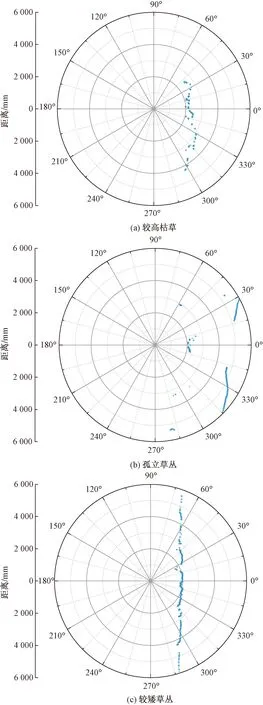
图10 单线激光雷达扫描得到的基础点云图Fig.10 Basic point cloud obtained by single-line LiDAR
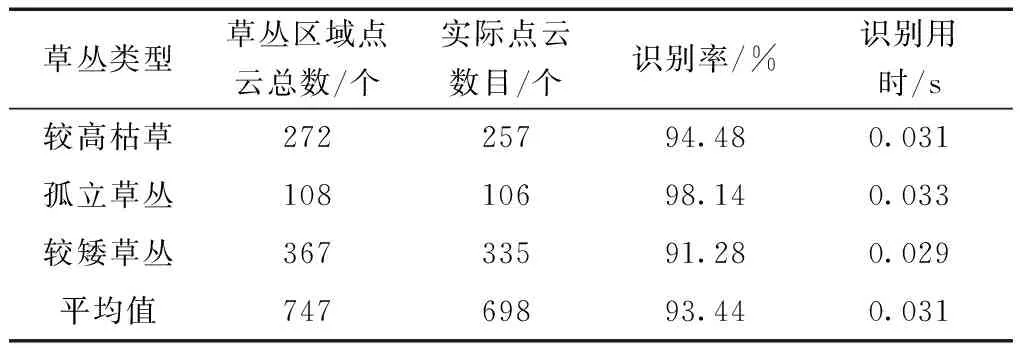
表3 各类型草丛识别率Table 3 Identification rate of each type of grass

图11 多阈值草丛识别算法训别结果Fig.11 Identification results of multi-threshold grass feature recognition algorithm
5 结论
针对户外视觉识别容易受到光照等环境因素影响识别速度和准确性,以及多线激光雷达数据量庞大、处理耗时等问题,通过对草丛特征的分析提 出了一种基于单线激光雷达的多阈值草丛识别方法,通过试验验证该算法能够准确地识别草丛特征,对典型草丛的识别率达到93.44%,并且识别速度快,处理耗时短,识别用时平均约为30 ms。所提出的多阈值草丛识别算法,对于非结构环境下草丛等柔性障碍物的识别具有一定的借鉴意义,有效扩展了单线激光雷达的应用范围。
