四臂锚杆转载机组研发与应用
2022-08-08齐丽丽
齐丽丽
(山西天巨重工机械有限公司, 山西 晋城 048000)
引言
当前,国内煤矿巷道掘进一般采用的作业方式有掘进机配套单体气动锚杆钻机、掘进机配套液压锚杆钻车、掘锚一体机等,由于掘进机或掘锚一体机在截割的过程中,设备机身一直处于摆动或移动的状态,机组在掘进的过程中锚杆支护装备无法同步实现锚护作业,导致锚护设备在掘进机割煤时处于停用的状态,由此带来的主要问题就是掘进效率低、支护速度慢。因此,研究一种可实现掘支运平行作业的设备成为解决当下煤矿快速掘进的关键所在。MZHB4-800/25 四臂锚杆转载机组跟随掘进机或掘锚机同步进行运输和锚杆锚索支护作业,掘支运同步进行,互不影响,大幅提升了掘进效率[1]。
1 四臂锚杆转载机组的组成及工作原理
四臂锚杆转载机组属于煤矿井下掘进机(或掘锚机)配套设备,主要由行走部、左后钻臂、机体部、左作业平台、左前钻臂、右作业平台、右前钻臂、右后钻臂、油箱部、输送部、护板操纵部、泵站部等部分构成,如图1 所示。巷道掘进时,四臂锚杆转载机组跟随掘进机同步进行锚护及物料运输作业,大幅提升了掘进支护效率[2]。

图1 整机结构图
2 主要技术参数
工作范围(宽×高)6 300 mm×4 000 mm;总装机功率132 kW;行走方式为履带式;行走速度10 m/min;爬坡能力±16°;钻臂数量4 台;钻进锚杆、锚索孔直径Φ22~Φ42 mm;钻进锚杆、锚索孔深度20 m;钻进锚杆、锚索孔用钻杆规格B19/B22;推进器推进行程1 660 mm;推进器推进速度5 m/min。
3 关键技术研究
MZHB4-800/25Y 煤矿用锚杆转载机组集运输与锚杆支护为一体,采用履带式行走,与迈步式临时支护、掘进机及二运转载皮带机配合作业。机组配套设置一套输送溜槽和四套锚杆钻臂,整机实现电液遥控控制,使用大功率电机为机组的液压系统、机组照明、瓦斯监测等提供动力;液压系统采用知名品牌的负载敏感柱塞泵,质量可靠、性能稳定[3]。
3.1 输送部
输送部作为整个机组的物料运输基础,主要由接煤斗、从动链轮、刮板链、溜槽、主动轮组、支撑油缸等组成。输送部设置在机组的左右轴线上,一端与机体部前端绞接,另一端通过支撑油缸与机体部后端绞接;其中刮板链为中单链结构;支撑油缸伸缩,推动输送部调整二运连接架的高度;配套作业的掘进机将物料输送至本机输送部前端的接煤斗,液压油为主动轮组的驱动马达提供动力,以驱动封闭的刮板链沿输送方向运转,从而物料运输至主运输皮带,输送部结构如下页图2 所示。
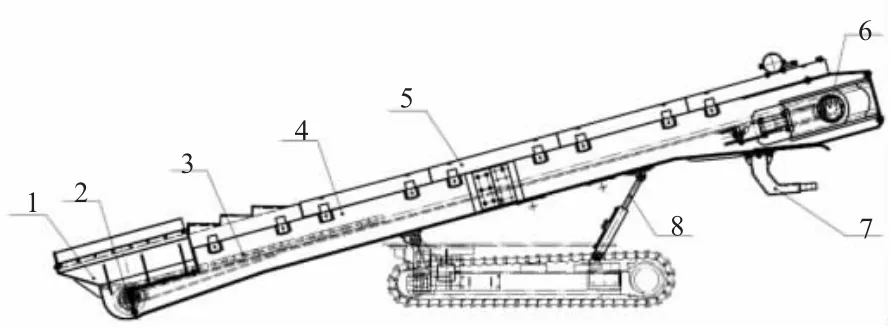
图2 输送部结构图
3.2 钻臂
机组前、后钻臂共四台,左右对称分布,四台钻臂按前二后二方式布置,左右前钻臂即可施工顶板锚杆孔,也可施工角锚杆孔、侧帮锚杆孔等,后钻臂主要补打滞后的帮锚杆孔,前后钻臂配合作业、互为补充、互不干涉,大幅提升了锚护作业效能。
3.2.1 前钻臂
前钻臂采用悬臂式结构,左右对称布置安装在机体前部平台上,主要由钻孔推进器、摆动油缸Ⅰ、摆动油缸Ⅱ、调整机构、伸缩总成、支撑油缸、回转座、固定座等组成,前钻臂与钻孔推进器连接,通过二者共同配合,完成钻孔及紧固锚杆锚索动作,实现的动作主要有钻臂上下升降、臂身向外回转、钻臂伸缩总成前后伸缩、推进器左右旋转、推进器前后旋转等。前钻臂结构如图3 所示。

图3 前钻臂结构图
3.2.2 后钻臂
后钻臂左右对称安装在机体部平台中部位置,主要由滑动座、升降装置、调整机构和钻孔推进器组成,滑动座在滑移伸缩油缸的作用下可前后滑动,从而带动安装在其上的升降装置和调整机构前后滑动,满足锚杆锚索施工过程中的前后不同位置排距要求;升降装置的双向油缸上下伸缩,带动板式链绕链轮运动,从而带动调整机构沿升降架上下滑移,满足锚杆锚索施工过程中不同高度范围的施工要求;调整机构的摆动油缸回转,带动摆动油缸固定板旋转,从而带动钻孔推进装置实现左右180°旋转,同时配合调整油缸的伸缩杆伸缩,带动钻孔推进装置可以实现前后小角度调整,摆动油缸回转配合调整机构调整,可快速定位不同角度的顶帮锚杆锚索孔。后钻臂结构如图4 所示。

图4 后钻臂结构图
3.3 站人作业平台
站人作业平台安装在机组前端左右两边,主要由升降油缸、升降机构、回转驱动和回转平台组成,站人作业平台可实现升降、回转等功能,其高度调节灵活,展开后站位面积大,且站人翻板采用防滑结构设计,保证了人员的站位安全及站位面积需求。站人作业平台结构如图5 所示。

图5 站人作业平台结构图
3.4 电气系统
机组电气系统主要由真空电磁起动器、三相异步电动机、声光信号器、LED 照明灯、急停按钮、控制按钮、隔爆电铃、甲烷断电仪及各电缆组成,电气系统控制油泵电机的启动、停止,提供各种保护、照明、急停、瓦斯闭锁、监测等功能,机组行走采用电气远程操控系统,接入隔爆接收器和手持遥控器,将智能化遥控等技术引进电气系统中,提升机组的操控性能。
3.5 液压系统
机组液压系统是由液压泵站、操纵台、液压油缸、摆动马达、油箱、阀组及相互联接的液压管路组成。整机的泵站是由一台132 kW 三相异步电动机,驱动两台负载敏感柱塞泵,经多路换向阀,将压力油分别送给各执行机构,来完成各部件的动作。液压系统主要实现以下功能:驱动行走马达运转,带动机组实现行走;为输送马达提供动力;实现钻臂部的升降、伸缩及推进机构的各种动作;提供施工钻孔时所需的动力。
4 实际应用效果分析
MZHB4-800/25 四臂锚杆转载机组自2021 年1月开始在西山煤电西铭矿施工,巷道宽5.6 m、高3.8 m,顶锚杆每排7 根,排距1.5 m,帮锚杆每1.4 m 各3根,锚索工艺为2-1-2 形式布置,长度3 m。该四臂锚杆转载机组施工位置如下页图6 所示,本机组与迈步式临时支护、掘进机、桥式转载、可伸缩自移带式输送机配合作业。工作时,机组跟在已进行临时超前支护的掘进机后面,掘进机运输的物料被输送至本机输送部的接煤斗内,并通过本机组的输送部及机尾的桥式转载,输送至可伸缩自移带式输送机上;同时,本机组的四套钻臂通过升降、伸缩定位不同位置的顶帮锚杆锚索孔,完成锚杆支护作业,实现掘支运平行作业。最高日进尺达到10 m,最高月进尺达到300 m,日均进尺由原来的5 m 提升至10 m(每月按30 d 算),掘进速度大幅提高。

图6 MZHB4-800/25 四臂锚杆转载机组施工位置图
5 结语
四臂锚杆转载机组掘进机配套使用,掘进机在前面进行掘进作业的同时,四臂锚杆转载机组中间输送部完成物料的连续运输,同时,四臂锚杆转载机组两侧设置的四台钻机进行全断面锚杆、锚索支护,实现掘支运平行作业。该种平行作业模式,实现了多工序平行作业,减少了各工序间施工的影响,使各工序衔接更加紧密,有效提升了矿井生产的单进水平,实现了掘进工作面生产班连续作业。同时,机组采用新型视距遥控系统,在解决煤矿掘进安全高效和降低工人劳动强度方面都有其明显的优势。