杂波背景下慢动目标多特征融合检测系统设计
2022-08-02史亚锋王曰根吕春雷
史亚锋,王曰根,吕春雷
(1.中国电子科技集团公司第五十二研究所,杭州 311100;2.中国科学院长春光学精密机械与物理研究所,长春 130033)
0 引言
在智能交通、智能化检测、军用目标检测等方面,目标检测已逐步深入到人类的日常生活和工作中。目标检测是一种利用目标的几何特性和统计学特性进行图像分割的方法。该方法实现了对目标的分割与识别,其精确度和实时性是整个系统的一个重要功能。但是对于同一帧杂波视频下的目标和障碍物而言,由于其均处于同一杂波背景中,二者之间的电磁特性非常接近[1],再加上慢速特性以及其他干扰因素的影响,使得被检测目标产生的回波能量非常低,很难对其进行精准检测。为此,相关目标检测方法引起了学者的广泛关注。
黄凤青[2]等在双通道卷积自编码器的基础上实现了对慢动目标的检测。将时频谱写入到卷积自编码器模型中,利用IQ双通道结构来提升目标回波的幅度值,并将所有目标的特征值融合在一起;最后通过跳跃连接结构分析目标尺度,以此突出目标的特征,实现精准检测。仇国庆[3]等利用视觉特征融合的方法实现红外弱小目标的检测。在Laplace算法的基础上,对原始图像锐化处理,以此获得图像的边缘信息,提高图像整体的像素强度;利用局部多项梯度算法对障碍物和杂波背景进行抑制,突出被检测目标的灰度差异特征;通过目标特征融合和自适应阈值处理,完成红外弱小目标检测。
上述两种方法均未对采集到的原始图像进行噪声去除处理,导致最终的检测效果存在一定的误差。为此,本文提出杂波背景下慢动目标多特征融合检测系统设计方案。系统硬件部分实现了图像的预处理和模数转换,并通过DSP[4](Digital Signal Processing,数字信号处理)模块控制其他模块;软件部分实现了慢动目标多特征融合检测、系统通信以及存储。硬件和软件组合在一起,将杂波背景下目标的多特征进行融合,融合结果即慢动目标特征检测结果。性能测试结果表明,本文系统得到的检测精度最高,所花费的时间最少。
1 慢动目标多特征融合检测系统设计
为了提高慢动目标检测系统的准确性和检测率等,本文引入了多特征融合算法,并且设计了检测系统的硬件部分,实现慢动目标检测。目标检测设计流程如下:
1)设计慢动目标多特征融合检测系统框架。
2)硬件设计:设计预处理模块、模数转换模块、DSP模块。
(1)预处理模块:有源低通滤波所获取的视频序列,消除其中包含的高频噪声。
(2)模数转换模块:采集目标的多普勒回波信号,通过 DSP模块和并行外部接口实现数据互传。
(3)DSP模块:标记内容、控制目标多特征融合、与其他模块通信以及与存储模块信息互传。芯片采用的是TI公司设计的TMS320C6203B。
3)软件设计:设计慢动目标多特征融合监测模块、通信接口模块、存储模块和特征提取模块。
(1)慢动目标多特征融合监测模块:在检测视频中慢动目标之前,通过对比目标的相似性,实现慢动目标多特征融合监测。
(2)通信接口模块:利用虚拟串口转换技术,将DSP模块的USB接口转换为虚拟的RS232串口,实现信息传递。
(3)模块和存储模块:作用是存储数据,采用TS201片上存储器。
(4)特征提取模块:采用LBP算子方法提取慢动目标的特征。
1.1 慢动目标多特征融合检测系统框架
根据提高目标检测的准确性的目的,基于上述三点目标检测流程,本文设计了慢动目标多特征融合检测系统,该目标检测系统的框架如图1所示。

图1 慢动目标多特征融合检测系统框架
根据图1可知,慢动目标多特征融合检测系统由硬件部分和软件部分两部分组成,其中硬件部分包括预处理模块、模数转换模块[5]、DSP模块,软件部分包括慢动目标多特征融合检测模块、通信接口模块、存储模块以及特征提取模块。预处理采集的视频序列后,有效抑制了杂波及其他干扰的影响,为后续实现更精准的检测做好基础准备工作。
1.2 硬件设计
为了成功实施杂波背景下慢动目标多特征融合检测系统,设计硬件部分的预处理模块、模数转换模块、DSP模块,具体设计如下。
1.2.1 预处理模块
预处理模块是对采集到的视频序列进行有源低通滤波,消除其中包含的高频噪声[6]。为了后续目标检测时能有效抑制共模增益,在设计该模块时,低通滤波的输出端利用二阶有源巴特沃思滤波器实现了差分输出[7],具体过程如图2所示。
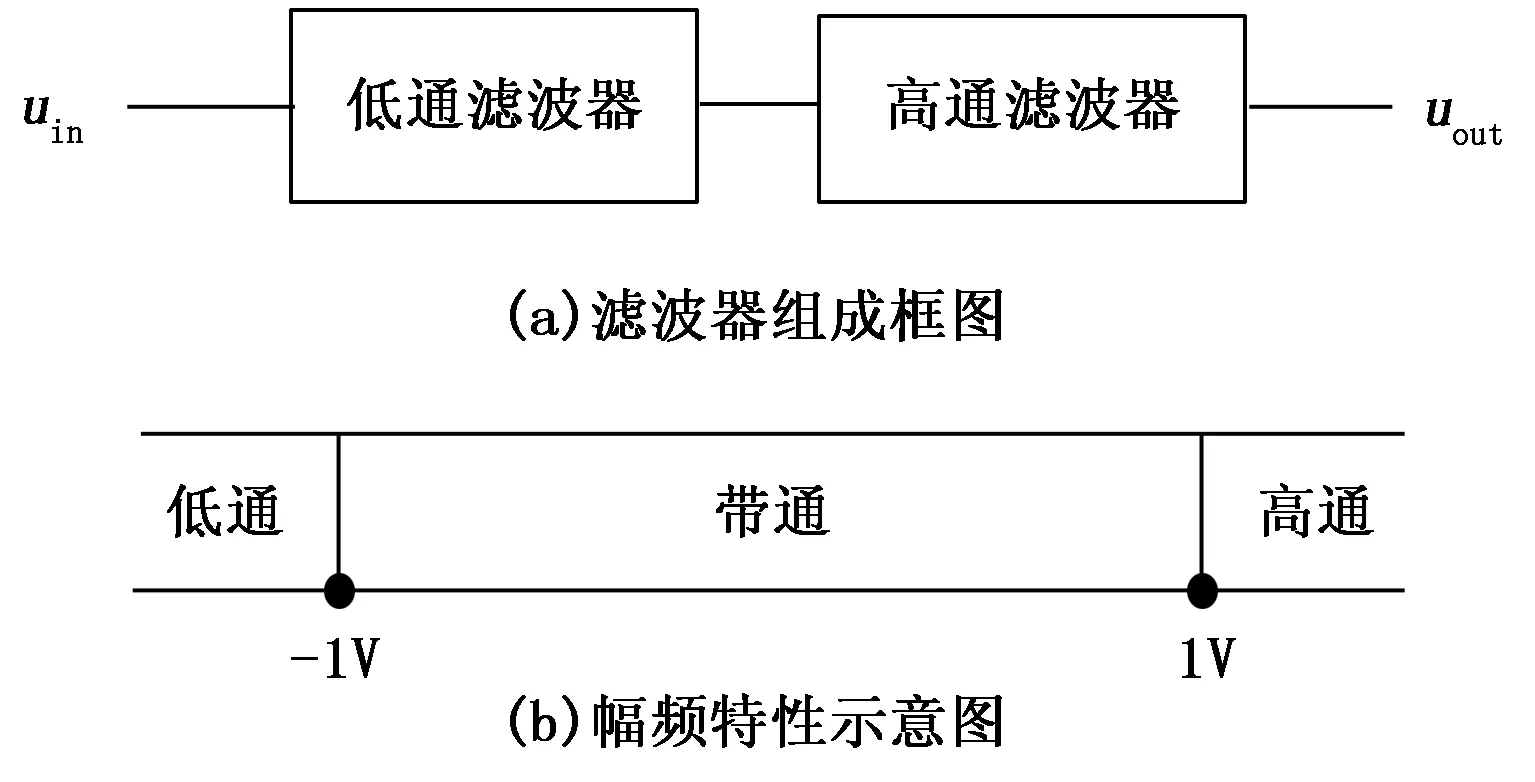
图2 滤波器原理
图2所示的滤波器AD芯片采用的是2.4 V电压,差分输入峰值低于2.2 V,目标回波幅度为[-1 V,+1 V],保证后续检测的高精准度。滤波器的通带增益Ao=-2,为了降低高频噪声的干扰,同时保证目标信号的无损失,将截止频率设置为fc=4 kHz。
选择AD公司研发的AD8132差模放大器实现差分输出。该放大器具有超强的过载恢复能力,不用配备相应的A/D转换器,不会对低频信息或直流信息产生任何影响,可以有效保证预处理的可靠性。在实际应用中,AD8132的同相端[8]输入信号时,其反相输出端采用了与同相端相同的电路结构,以确保系统整体电路的均衡性和运行可靠性。电路结构如图3所示。
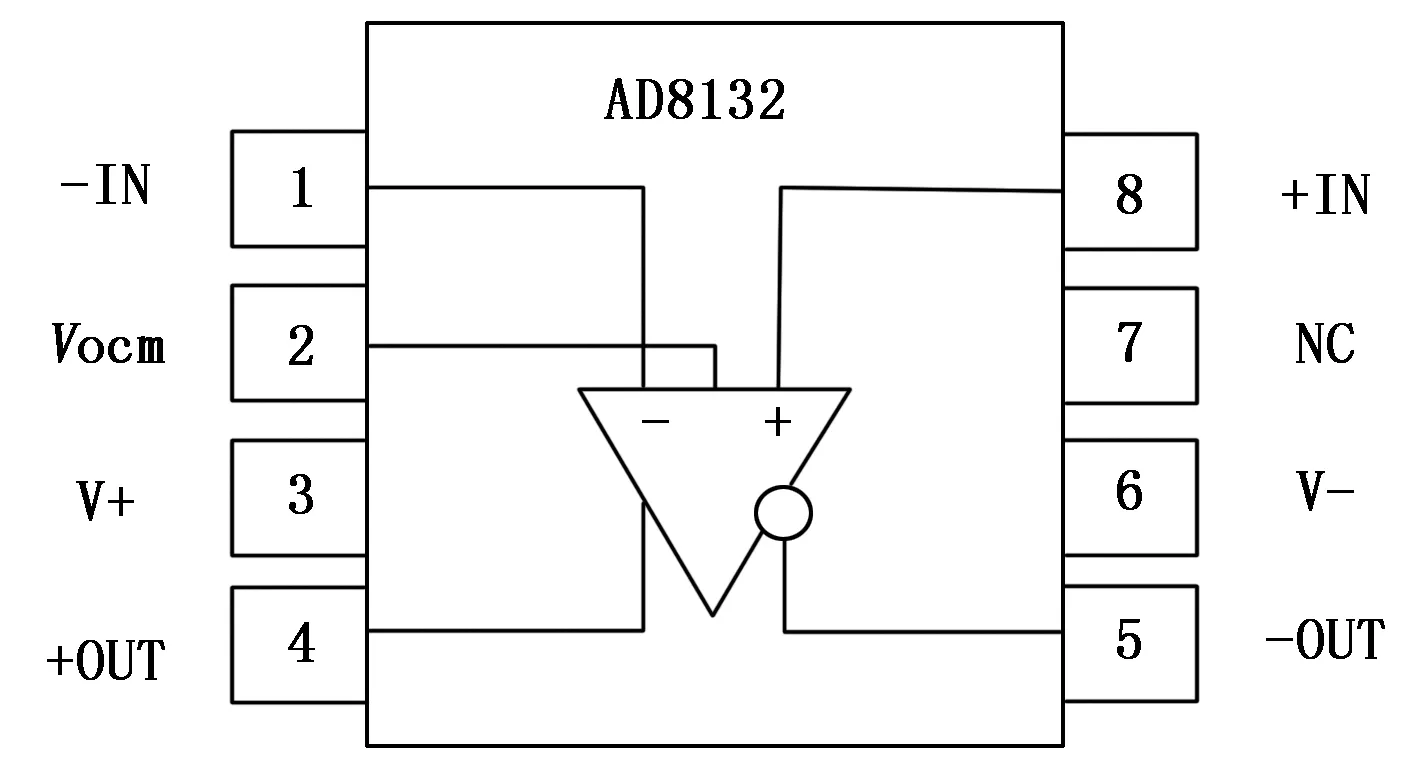
图3 AD8132差模放大器电路结构
1.2.2 模数转换模块
模数转换模块的主要作用是通过数字方式获取目标主体的多普勒回波信号,通过并行外部接口和 DSP实现数据互传。
本文设计的检测系统要求各个模块都尽可能地保留目标回波信号,同时抑制杂波的影响,降低信号的抖动频率,保证系统的低功耗。对于模数转换芯片的选取,需要配备相应的输出接口和PPI(parallel peripheral interface,并行外设总线)端口[9],具体接口如图4所示。
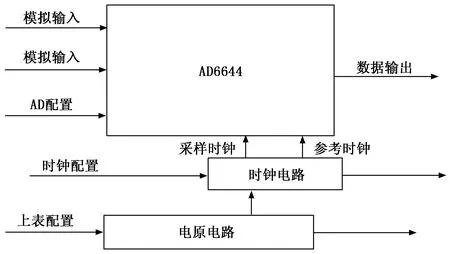
图4 通信接口示意图
根据图4可知,PPI端口主要包括模拟输入、AD配置、时钟配置、上电配置、数据输出等部分。本文选用的模数转换芯片为AD公司设计的具有超高性能的14位AD6644模数转换器,输出的格式为二进制补码,可以更好地抑制共模增益,降低杂波背景的干扰。AD6644内部具有三级转换结构,保证系统具有更高的检测精度。
1.2.3 DSP模块
DSP模块芯片采用的是TI公司设计的TMS320C6203B,频率为250 MHz,内部配备了384 kB的RAM(random access memory,随机存取存储器)和512 kB的数据RAM。同时,DSP模块设计了多通道缓冲串口,与系统的存储模块可直接进行信息传输。具体连接情况如图5所示。
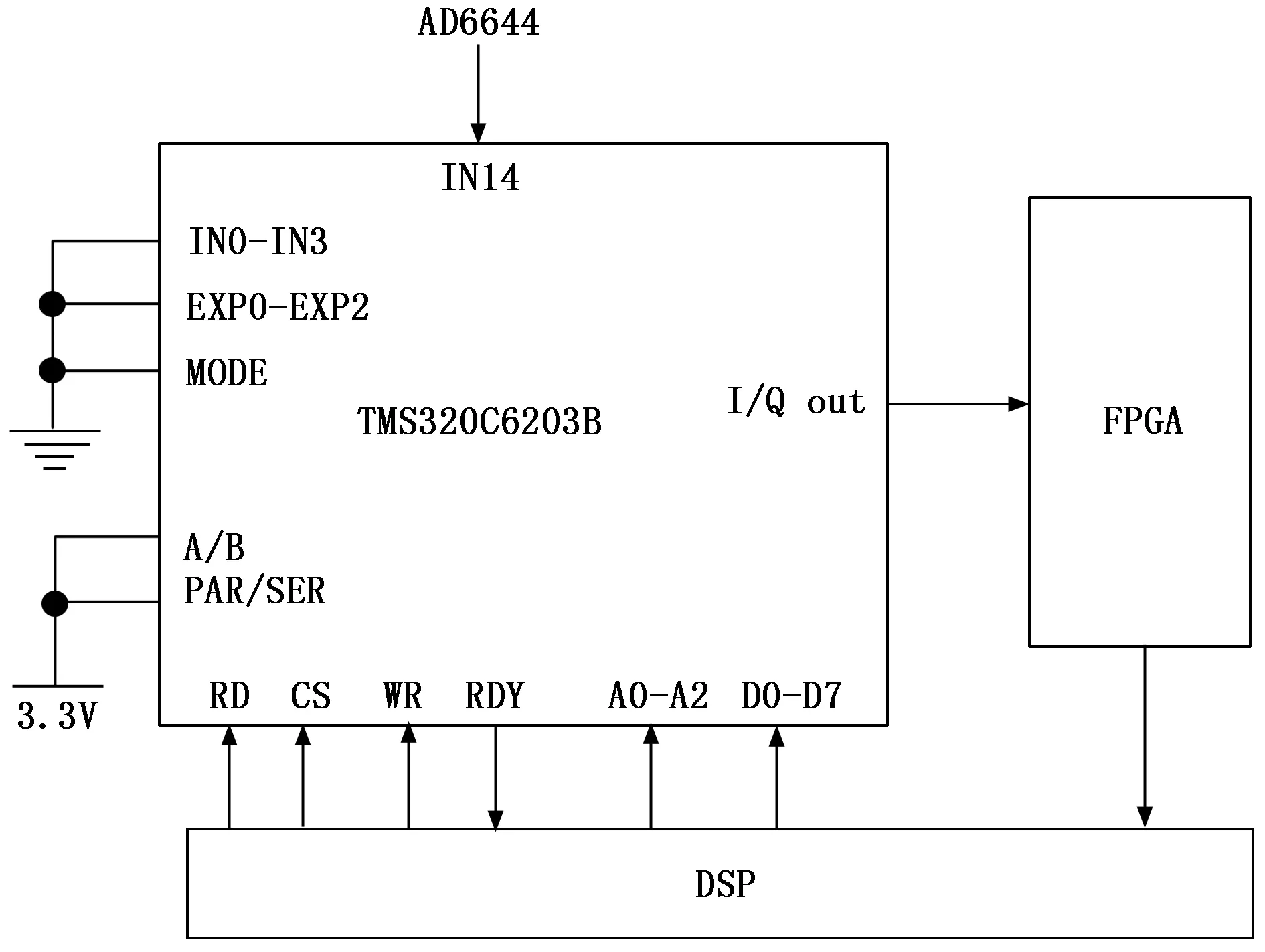
图5 DSP连接示意图
DSP在系统中的作用是控制其他模块,具体细分为内容的标记、控制目标多特征融合、与其他模块通信以及与存储模块信息互传等。DSP模块可剔除除目标主体外的其他障碍物或区域,仅保留目标信息,然后将其打包,传输至存储模块中。
1.3 软件设计
在DSP集成开发环境Code Composer Studio上,采用了模块化的设计思想完成了软件设计,主要由慢动目标多特征融合检测模块、通信接口模块、存储模块以及特征提取模块四部分构成。
1.3.1 慢动目标多特征融合监测模块
该模块在实际应用过程中,首先选取一段视频图像,在检测视频中慢动目标之前,需要将其分为若干个子区域,并计算每个子区域的CLBP(完全局部二值模式)直方图[10]和色调直方图[11]。然后通过对比目标的相似性,实现慢动目标多特征融合监测。
假设Mt表示t时刻时子区域的CLBP直方图,该区域慢动目标的相似性表示为:
(1)
式中,i表示子区域CLBP直方图的维度值,最大维度为n,M1,i、M2,i分别表示在i维度下,子区域CLBP直方图向量的归一化处理[12]结果,M1、M2分别表示子区域1、2的CLBP直方图。当M1=M2时,式(1)的计算结果为1。给定一个阈值σ,当SCLBP(M1,M2)≥σ时,说明子区域1、2之间具有相似的CLBP纹理特征。
每个子区域慢动目标的色调直方图相似性表示为:
SHue(N1,N2)=
(2)
式中,N1、N2分别表示子区域1、2的色调直方图,D表示子区域的长度,W表示子区域的宽度,N1,i、N2,i分别表示子区域1、2在维度i下的色调直方图的归一化处理结果。设定阈值为μ,当SHue(N1,N2)≥μ时,说明子区域1、2具有相似的色调特征。
对于阈值σ和μ,选值要格外注意,如果定义的值太大或太小,就会导致慢动目标的多特征与背景混淆在一起,无法实现精准检测。通常情况下会将σ和μ的值定义在[0.7,0.9]范围内,本文取其中间值0.8。
将CLBP纹理特征和色调等多种特征融合在一起,所能获得的即目标的最终特征,因此多特征融合检测问题也可以转化为融合目标检测问题,为此在式(1)和式(2)的基础上,选取某一块子区域与杂波背景模型做相似性计算,如式(3)所示:
S=αSCLBP(Mt,Mt,j)+(1-α)SHue(Nt,Nt,j)
(3)
式中,α表示多特征的融合的因子,取值范围为0≤α≤1,Mt,j、Nt,j分别表示背景模型中t时刻的第j个子区域,Mt、Nt分别表示子区域在t时刻下的CLBP直方图和色调直方图。
对于α值的确定,如果检测条件较好,一般取α=0.5;如果杂波背景影响较大,就要适当增大CLBP直方图相似性的权重值,α取值一般在[0.7,0.9]范围内,本文取中间值0.8;如果图像受到较大的阴影干扰时,就要适当增大色调直方图的相似性,α取值一般在[0.1,0.3]范围内,本文取中间值0.2。
在视频图像序列中,如果存在子区域的i值取值范围为1≤i≤L(其中,L表示第L个子区域),即可认定该子区域与杂波背景模型的相似度为S<2.5ηt,m(ηt,m表示t时刻下,子区域中第m个高斯分布的方差),则认定该子区域为图像背景,否则为目标。进一步利用GMM(gaussian mixed model,高斯混合模型)方法来更新杂波背景模型中的参数,具体实现过程如下所示:
1)预处理杂波背景模型;
2)将预处理后的背景模型代入到当前帧图像中,并将其分为若干个子区域;
3)计算每个子区域的CLBP直方图和色调直方图;
4)将子区域图像与杂波背景模型做相似性匹配[13]计算。如果二者匹配则将子区域代入到背景模型中,并更新图像整体参数,根据权值大小选择前m个背景模型后返回步骤(2);如果二者之间不匹配则将杂波背景模型中权值最小的筛选出来,明确慢动目标的多特征融合结果。
1.3.2 通信接口模块
通信接口模块采用DSP的多总线通信模块,其主要作用是建立系统各个模块之间的沟通连接。当图像经过预处理模块和DSP模块后,根据上位机中的缓冲空闲标志位[14],判定是否向目标多特征融合检测模块和存储模块发送图像数据。
为了降低系统软件部分的开发难度,通信接口模块利用了虚拟串口转换技术,将DSP模块的USB接口转换为虚拟的RS232串口。DSP负责通讯和控制总线规范, IIC总线负责采集和通信现场的数字信号,CAN (controller area network)总线负责与伺服设备的通信, SPI串行口负责高速的数据传输和存储,以太网则负责将最终的测试数据打包上传到网管中心进行数据共享。CAN总线的体系结构可划分为数据链路层、物理层和应用层3个层次。
1.3.3 存储模块
存储模块本文采用的TS201片上存储器,每个内核独享100 kB高速、专用L1存储器[15],大于128 kB的大容量信息将存入L2存储器内。TS201还有一个优势就是可以通过EBIU(外部总线接口单元)接口向外延伸,得到SDRAM(同步动态随机存取内存)[16-18]和Flash两种存储器。
SDRAM存储器由2片MT48L32M16A2组合在一起构成,可存储图像数据或者图像处理过程数据[19-20]。Flash存储器外扩的内存大小通常为64 MB,由S29GL064M90T构成,主要存储DSP模块和目标多特征融合检测模块传输过来的数据。存储模块框架图如图6所示。
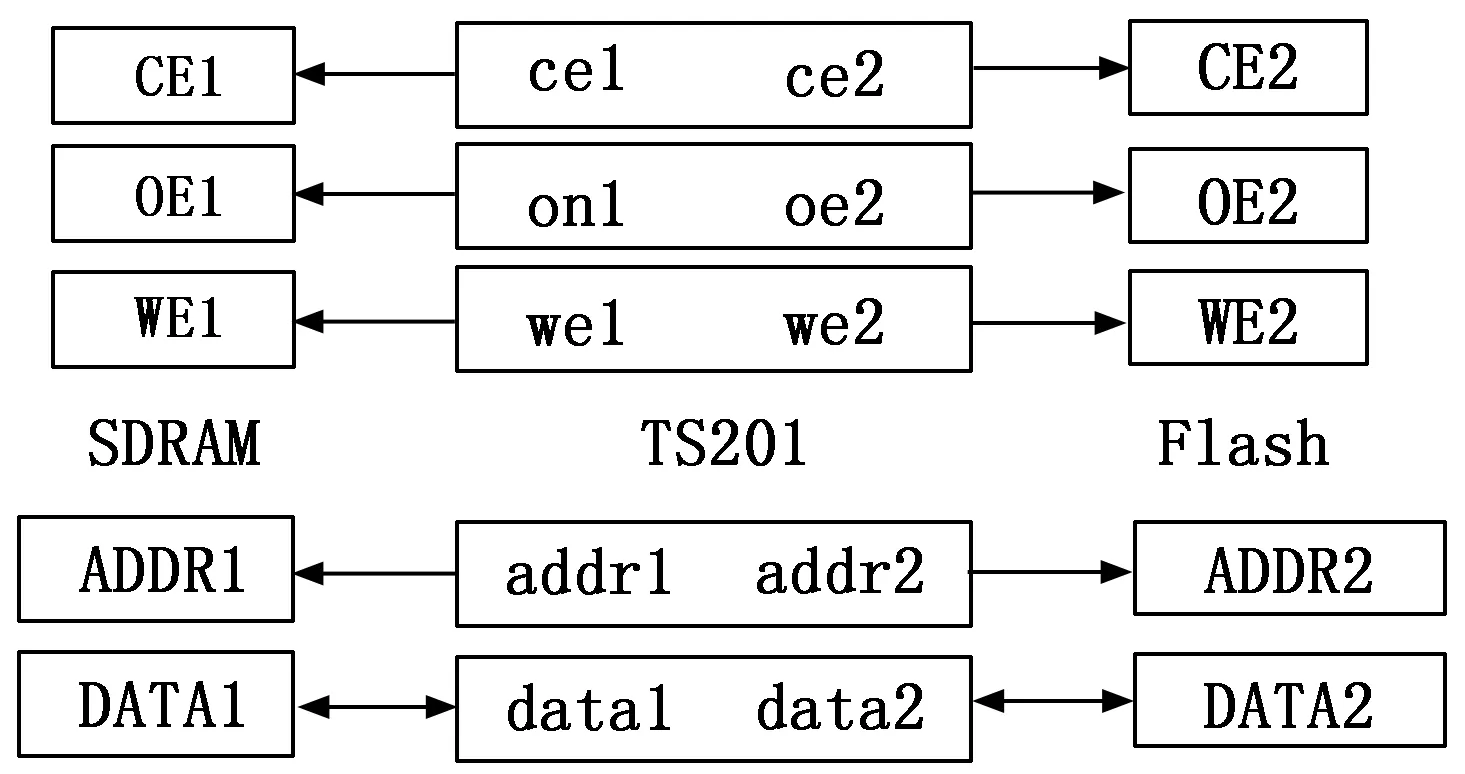
图6 存储模块框架图
外部扩展总线是由端口模拟而构成的,包括信号线、读/写控制信号线、片选信号线和中断请求信号。初始化程序设计实现主设备的初始化,一串口的初始化和与主控制器芯片的数据通信,这些都是系统软件的基础。主控制器的软件实现主要是完成核心驱动的功能,具体而言,就是只使用一种基本的数据传输方法。在此基础上,建立了相应的功能函数,实现了数据传输等操作。框架类协议在设备类中实现了一种传输协议,它可以执行不同类型的子类请求指令,从而对设备进行不同的访问和读写操作。在本设计中,基本数据传输的实现包含在传输函数中,该函数是严格按照协议格式编写的传输子程序,其参数包括传输数据的长度,数据缓冲区地址指针,端点和包号PID和负载。在参数和标识位初始化阶段,将内部地址分配到DATA0和DATA1,DATA1将有效负载加到DATA0上。
1.3.4 特征提取模块
LBP特征描述符是一种特殊的纹理描述符,它被广泛地应用于各个领域中,并在人脸识别中取得了很好的效果。当背景复杂边缘杂乱无章时,HOG 特征效果不佳,局部二值模式在这方面是互补的,将边缘形状特征和纹理信息结合在一起,可以更好地捕捉目标的外观。
LBP算子以邻近区域3*3为界,以邻近区域的中心像素作为阈值,将邻近8 个像素的灰度与中心像素进行对比,如果邻近像素值大于中心像素值,则将其编码为1,否则为0。通过改进LBP算子扩展3*3的邻域扩展到任意一个相邻域,从而得到了p个 LBP算子的公式:
(4)
式中,(x,y)表示中心像素点;gc表示中心像素点的灰度值;gi表示邻域内像素点的灰度值;p表示采样点个数;R表示圆的半径。若p等于8,则对均匀模式的LBP算子编码时,按从小到大的顺序其LBP图谱对应的灰度值为1~58,非均匀模式则被编码为0,即灰度值为0,故均匀模式的LBP图谱相比圆形LBP图谱整体偏暗。
综合上述内容,实现了杂波背景的处理和慢动目标的多特征融合,完成了杂波背景下慢动目标多特征融合检测系统设计。
2 试验结果分析
为了验证本文设计的检测系统在实际应用中是否合理有效,与引言中提到的双通道卷积自编码器和视觉特征融合算法展开了性能对比测试。
2.1 试验设置
实验是在MATLAB7.0平台上实现的,CPU为6 GHz,Windows 7 旗舰版,64 位操作系统。在四段视频内截取4张含有慢动目标的图像,如图7所示,其大小为320×256,灰度级为256,图像背景中含有一定的噪声。
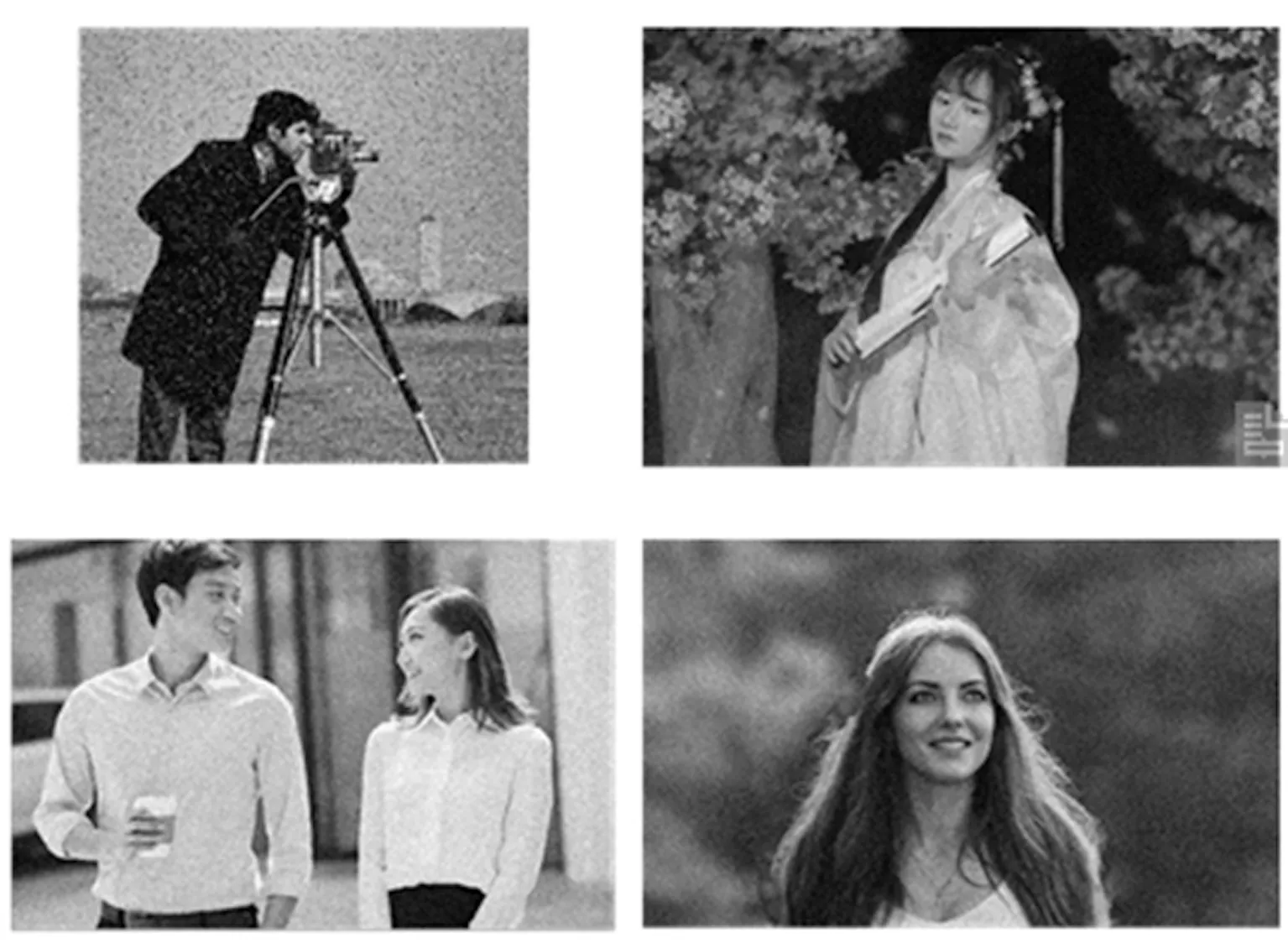
图7 原始图像
以图7所示的原始图像为基础,分别进行检测性能、检测概率、检测效率测试、CPU占比以及抗干扰性能,具体步骤如下:
检测性能测试:分别利用本文方法与双通道卷积自编码器、视觉特征融合算法3种算法对四段视频中的慢动目标进行特征融合,通过对比3种算法应用后的图像噪声分布情况验证其检测性能,其中噪声分布越少,证明背景中多余信息和无用信息更少,对应算法的特征融合效果越好,检测性能越好。
检测概率测试:将原始图像的信噪比σ定义为:
(5)
式中,GT表示目标主体的最大灰度平均值,GT表示原始图像的灰度平均值,σ表示灰度标准差。
再从一段视频序列中截取含有慢动目标的4张杂波图像,记为图像1~4。图像具体参数如表1所示。

表1 图像参数
设置4张图像的多特征融合结果数量分别为65、69、78和95,分别利用3种算法对4张图像进行检测,对比其多特征融合结果数量与预设数值的差异,验证其检测概率。
检测效率测试:以检测花费的时间为对比指标,取同一段视频序列中4张图像,分别使用3种算法对其进行检测,验证算法的检测效率。检测花费时间越短,证明对应算法的检测效率越高。
CPU占比以及抗干扰性能测试:随机选取150张原始图像,通过计算机自带软件统计CPU占比,CPU占比高,即证明该方法下的设计系统出现了计算机运行卡顿现象。同时选取信噪比峰值为实验性能指标,信噪比峰值越大,则表明该方法下系统的抗干扰性能越好。
2.2 结果分析
2.2.1 3种算法检测性能对比
首先对比本文方法与双通道卷积自编码器、视觉特征融合算法在慢动目标多特征融合检测方面的性能,结果如图8所示。
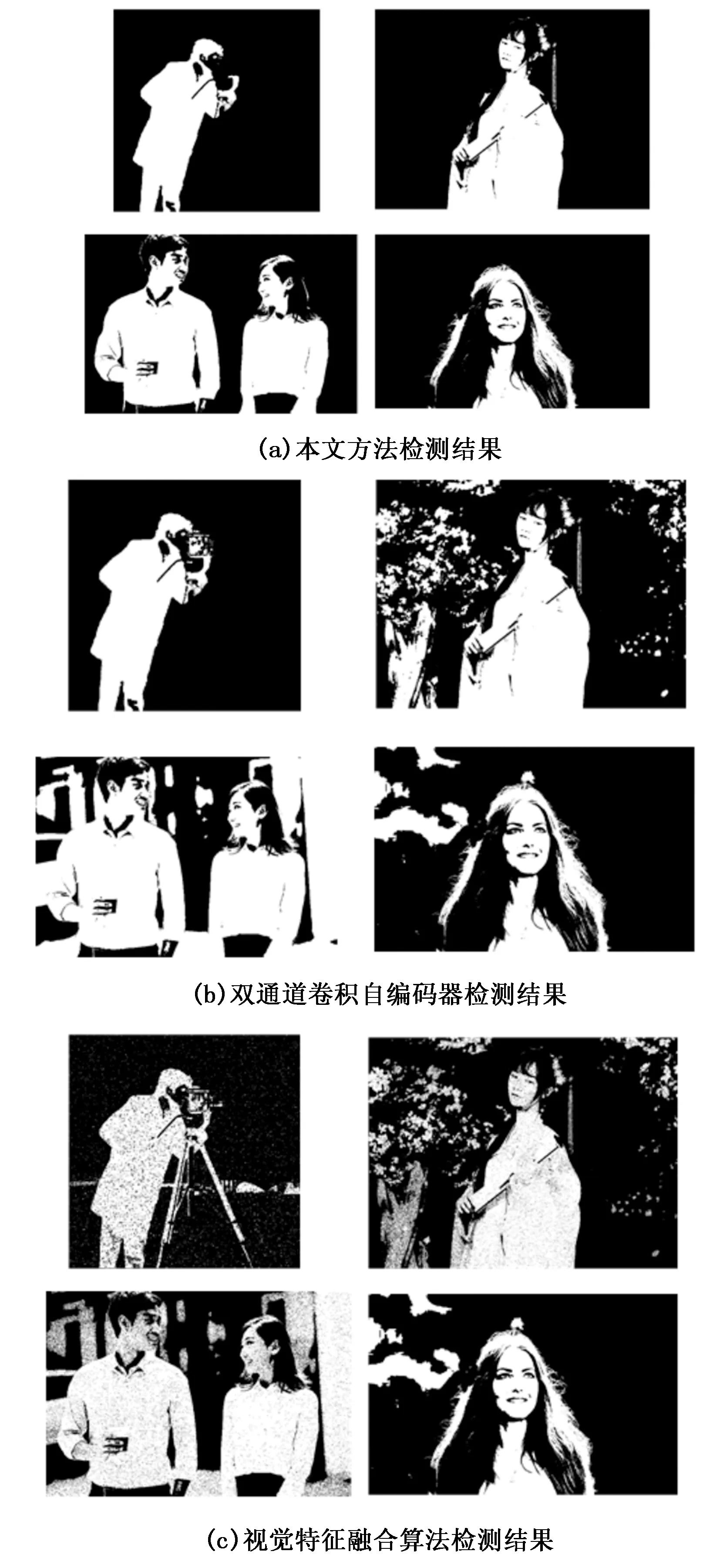
图8 3种算法检测结果对比
从图8中可以看出,由于原始图像杂波背景的影响,对比算法的检测结果中含有大量的多余信息和无用信息,使得目标多特征融合检测结果误差较大。而本文方法的检测结果中没有出现多余的部分,有效抵抗了杂波背景的影响,得到了精准的多特征融合检测结果。其主要原因是本文方法将原始图像分成了若干个子区域后计算了其CLBP直方图和色调直方图,通过与背景模型的相似性匹配,提高了最终检测结果的精度。
2.2.2 3种算法检测概率对比
3种算法的检测概率结果如表2所示。

表2 3种算法检测结果
通过表1可以很清楚地看出,随着视频序列的时间推移,目标特征亮度越来越小,σ值最终也从1.474降到了-0.022,说明图像4中的目标特征最大灰度平均值要比图像整体的灰度均值低。结合表2可知,在这种影响因素较多的情况下,本文方法依然取得了非常理想的多特征融合检测正确率,平均值达到了99.1%,双通道卷积自编码器为93.7%,视觉特征融合算法为95.8%。综合对比之下,可以发现本文方法具有更高的检测概率。
2.2.3 3种算法检测效率对比
利用3种方法对同一段视频序列中4张图像的检测花费时间对比结果如图9所示。

图9 3种算法检测效率对比
通过图9可以看出,随着图像中目标融合数量的逐渐增多,本文方法所需的检测时间呈现缓慢增长趋势,且整体波动较为平稳。而其他两种方法的检测时间曲线均出现了大幅度的增长,尤其是双通道自编码器,曲线波动较大,说明该算法的稳定性较差。
2.2.4 3种算法检测目标的CPU占比对比
设计方法是否具有实际应用价值,需要分析很多指标,其中一个指标为CPU占比,如果设计方法在运行时CPU占比高,导致计算机运行出现卡顿等现象,则其应用价值不高,即检测方法的存在一定的局限性,需要进一步改善,因此,为了进一步验证该方法的性能,对比分析检测方法的CPU占比,此次分析随机选取100张原始图像,通过计算机自带软件统计CPU占比,实验结果如表3所示。
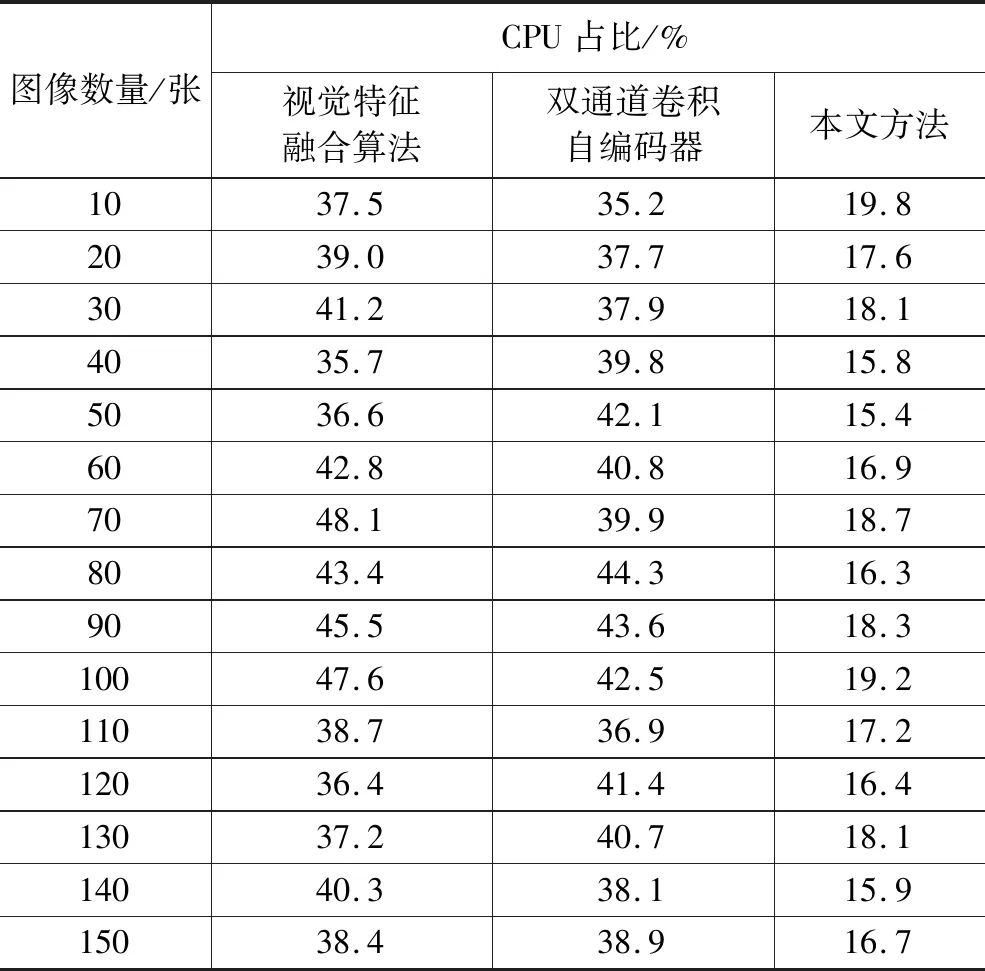
表3 3种算法检测的CPU占比结果
根据表3可知,视觉特征融合算法的CPU占比均在35.0%以上,最高CPU占比达到了48.1%,双通道卷积自编码器的CPU占比也均在35.0%以上,其最高CPU占比达到了44.3%,该值虽然低于视觉特征融合算法的CPU占比最高值,但是也相对较高,本文方法CPU占比均在20.0%以下,CPU占比最高值仅为19.8%,3种目标检测方法相比可知,本文方法的CPU占比最低,分别比视觉特征融合算法和双通道卷积自编码器降低了15.0%以上,因此,本文方法有效地降低了CPU占比,提高了慢动目标检测的运行效率,具备一定的应用价值。
2.2.5 3种方法抗干扰性对比
在实际检测慢动目标时,实际场景下目标检测经常受到各种各样的干扰,导致检测结果不准确,因此,目标检测方法的抗干扰性能,以信噪比峰值为实验性能指标,信噪比峰值越大,则表明验证的方法的抗干扰性能越好。实验随机选择150张原始慢动图像,整体实验数据如表4所示。

表4 3种算法信噪比峰值对比结果
根据表4可知,3种目标检测方法的信噪比峰值均没有随着检测数量的增加而增加,整体呈现相对稳定的状态。视觉特征融合算法的信噪比峰值最低为4.11 dB,最高信噪比峰值仅为4.97 dB,双通道卷积自编码器的信噪比峰值最低为4.12 dB,最高信噪比峰值仅为4.98 dB,这两种方法的信噪比峰值相对较低,本文方法的信噪比峰值最低为8.61 dB,最高信噪比峰值仅为8.93 dB,本文方法的最低信噪比峰值分别比视觉特征融合算法和双通道卷积自编码器的最高信噪比峰值高出3.64 dB和3.63 dB,3种目标检测方法相比,本文方法的信噪比峰值最高,因此,本文方法的抗干扰性能最佳,有效提高了抗干扰性能。
3 结束语
在杂波环境下,由于杂波中噪声的影响,会严重降低视频质量,给目标跟踪和识别造成不便。因此,如何在杂波环境下有效识别目标,融合慢动目标特征成为相关领域亟需解决的问题。本文设计的慢动目标多特征融合检测系统,可有效抑制杂波的干扰和影响,具有较高的检测精度和检测效率,能很好地适应复杂检测背景。但是本文设计的检测系统在处理杂波影响较为严重的图像时,检测精度还有一定的提升空间,下一步将以此为研究重点,进行更深入地研究。
