基于RSSI的低成本室内三维空间定位模型研究
2022-07-21顾祥玉赵千倩
陈 静,顾祥玉,赵千倩,吴 莹,余 雨
(南京工程学院 信息与通信工程学院,江苏 南京 210000)
0 引 言
2019年,第五代移动通信(5G)系统开始商业化。在5G三大应用场景中,大规模机器通信(mMTC)作为物联网和工业互联网潜在而重要的应用场景,一直以来深受国内外研究者关注。
伴随移动通信技术的不断更新,无线传感器网的布设和应用量得到了前所未有的提升。无线传感器网是由大量微型低成本传感器构成的多跳自组织网络,在节点处采用无线的方式进行通信,被监控对象的信息以协同的方式被感知、收集、处理和传输,具有实现区域的监测、为用户提供服务的多项功能,因此被广泛应用于各个领域。
在无线传感器网中,如果要确定各个传感器、智能设备和物联节点的位置,从而开展设备维护、信息更新和数据采集任务,那么定位功能不可或缺。位置信息的获取和应用成为人们生活中的重要需求,缺失定位的监测信息是不完整的。因此,无线传感器网中的定位问题已经成为人们研究的热点。
在mMTC应用场景下大量的传感节点被布设在环境中,如果单独引入定位系统,将会较大程度地增加通信系统构建的成本,采用传感器、智能设备和物联节点自带的信号或者功能进行定位是较好的解决方案。实际上,当前物联网环境中,大部分节点采用ZigBee、WiFi或蓝牙进行无线通信,未来可能会应用毫米波频段相关技术进行数据传输和汇集。这些无线通信技术有一个共同的特点,即采用RSSI或类似指标进行信号强度检测。因此,为了保证物联网应用的准确性、完整性和经济性,如何利用RSSI信号构建低成本的室内物联网环境下3D定位系统成为了亟需解决的关键问题。
1 相关研究工作
现有无线传感网定位方法可以分为3类:邻近信息法、场景分析法、几何特征法。其中,几何特征法是一种基于几何原理的定位算法,是目前应用最广泛的定位算法,一般情形下需要确定多个点及多条边作为已知条件。
1.1 基于RSSI的质心定位算法
质心定位算法是利用连接性进行定位的算法,在不确定距离信息的情况下就可以进行简单的定位,容易实现。算法的原理主要是利用锚节点以一定的时间为周期向四周发射自身的位置信息和唯一的标识符,待定位的盲节点不断搜索附近不同的锚节点信息,当收到的信息来自不同的锚节点并且锚节点的数达到某一阈值后,就通过个锚节点确定自身的位置。假设盲节点的坐标为(,),个锚节点的坐标依次为(,),(,),...,(x,y),利用质心算法可得未知节点的坐标为:

传统质心定位算法的不足之处在于:当盲节点所发射的信号在各个锚节点处形成的信号强度值方差相差很大时,就会导致较大的定位误差。
1.2 三边定位算法
三边定位算法通过测量待定位节点与三个信标节点间的距离,计算得到未知节点的位置。通过此种定位算法不难得出未知节点接收信标节点的数据信息,待定位未知节点必须在其通信范围内。基本原理如图1所示。

图1 三边测量法的原理
已知未知节点接收来自于、、位置信息的数据包,、、三点的坐标信息为(x,y)、(x,y)、(x,y)、节点接收数据信息的距离为d、d、d,令未知节点的坐标为(,),建立如下方程即可解得点的值:

然而这些研究主要采用的是WSN技术,成本高,且只能进行二维定位,缺乏对设备的高度信息的反馈。因此,本文针对上述问题,提出一个基于RSSI的低成本室内三维空间定位模型并通过实验进行验证。
2 实验方案设计
如前所述,现有大部分传感器、智能设备或物联节点都采用ZigBee、WiFi或蓝牙无线通信协议,这些无线通信协议的RSSI信息较易获取。为了构建低成本的室内物联网环境下3D定位系统,不失一般性地,本文采用ZigBee技术对三维室内空间的定位进行研究,进而推广到WiFi或蓝牙技术的定位。
ZigBee技术是无线传感器网络中常用的无线通信技术,具有低功耗、低成本、高扩充及自组织等特性,且部署简单,在军事、环境、医疗、智能家居和工业控制等诸多领域都已展现出较为广阔的应用前景。使用ZigBee技术进行定位研究,有低成本、易实现及灵活性高等特点,在无线传感器网络中有着难以替代的作用。
CC2530是TI公司推出的用于2.4 GHz IEEE802.15.4和ZigBee应用的真正的片上系统(SoC)解决方案,它具有业界领先的ZigBee协议栈(Z-Stack)并且能够提供强大和完备的ZigBee解决方案。因此,研究基于ZigBee的物联网环境中3D定位技术具有相当大的可行性和重要的现实意义。
对点到点的RSSI数据和距离数据在实验室环境中进行了测试。测试条件:空旷室内环境,尺寸为6 m×5 m×3 m。三个CC2530定位模块每隔1 s分别定时发送数据给另一个CC2530待测定位模块,每个位置点测试10次取平均值,同时将RSSI数据通过串口发送到笔记本电脑。笔记本电脑通过程序将RSSI数据处理成距离数据并矫正。
锚节点和盲节点硬件完全一致,差别在于所烧写的软件固件程序参考节点与移动节点采用了2.4 GHz IEEE802.15.4/RF4CE/ZigBee的片上系统解决方案,节点模块可独立上电使用。
RSSI测距算法公式为:

其中:表示信号射频参数,单位为dBm,含义是距离信标节点1 m处接收到的信号平均能量的绝对值,即距离信标节点1 m处的无线电信号强度;为信号衰减参数,该参数值与环境有关。
利用RSSI进行定位时,为减小环境和设备安装所带来的距离计算偏差,须采集多组值和RSSI值来确定和的值。
3 基于RSSI的低成本室内三维空间定位模型
相对于点的三维定位数据如下:

三维定位是二维平面定位的延展,当节点要实现在三维空间的定位时,用于定位的各项变量无论是锚节点的坐标还是节点之间的距离,亦或者是角度数据都必须要扩展到三维空间当中去。此外,在进行三维定位研究时,因考虑到的因素比二维更加复杂,在实际研究过程中需要采用适当的定位位置计算算法以及定位研究模型,才能实现理论上可行的三维空间定位。本研究模型的构建基于三维空间中的四个锚节点位置实现对空间盲节点的定位。基于ZigBee的物联网环境中3D定位场景如图2所示。

图2 基于ZigBee的物联网环境中3D定位场景
因研究中采集到的信号在实际传输过程中会受到各种干扰,如人的走动、环境信号噪声等,因此需要对采集到的信号数据进行处理,对算法进行误差校正。整个过程中的误差主要由时间误差和定位误差两部分组成,关系到未知节点的定位精度与RSSI的参数和基站节点测量位置的精度。在测量RSSI值参数时会受到多路径、通信信道以及空间中的各种噪声,甚至包含一些电磁场的干扰;另外,在计算定位过程中估计的误差是不确定的。
4 实验测试与仿真
表1给出了定位模型试验数据对比结果,其中、、为理论坐标值,、、为实际坐标值。由表1数据可知,RSSI值与距离的拟合关系中存在着较强的线性关系。在实际的6 m×5 m×3 m空旷实验环境中,考虑到ZigBee天线本身、多路径及空间中的各种噪音,在各个发射和接收模块的天线角度不变的情况下,对射频参数即距离信标节点1 m处的无线电信号强度进行多次测量,并计算其平均值,以此减小误差,在本次实验中的取值为39 dBm;为信号衰减参数,该参数值与环境有关,在本次实验中经过多次测量和计算取值为3.15。
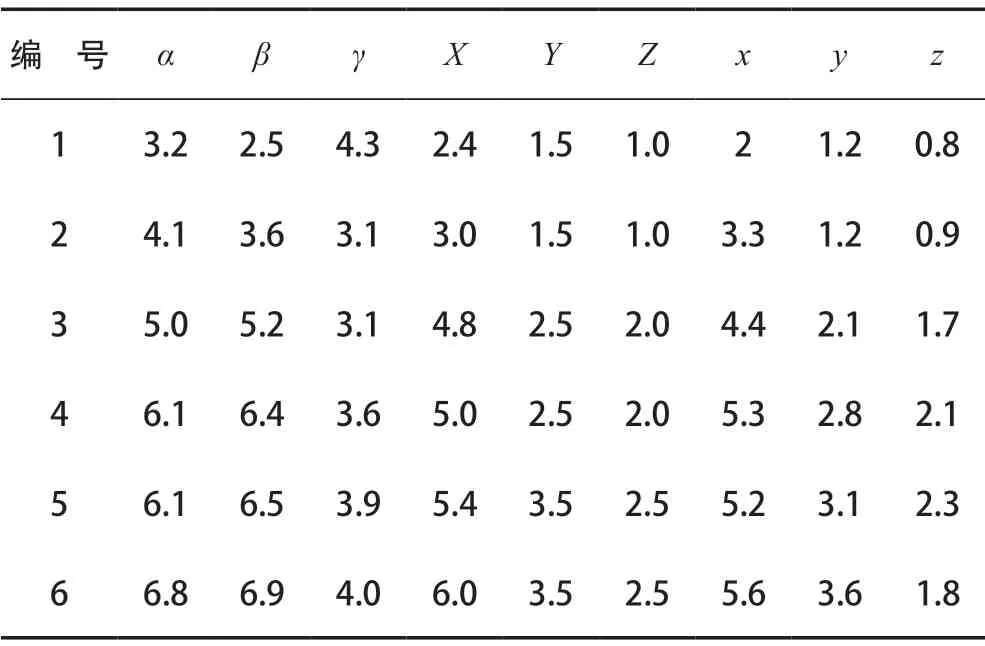
表1 定位模型试验数据对比表
在无线传感器网络的锚节点部署完成后,设定锚节点发射通信信号,盲节点会得到该锚节点的个RSSI数据值。由于ZigBee定位的精度不高,所以在数据分析的过程中对数据的处理显得尤为重要。先对改组数据序列进行预处理:在信号序列中,对信号强度数据进行大小排序,提出两端可能含有粗差的数据,找出信号强度数据的中位数,选取一个以中位数为中点的区间,实心信号区间内粗差数据减少;最后将选取的信号区域内信号值求平均,并将结果作为最终输出,用于最终坐标位置定位估算。
如图3所示,在文中的测试场景下RSSI值与三维坐标值之间存在一定的关系,并且实验中得到的实际数据和理论数据之间存在误差,但是在ZigBee模块的允许误差范围内。在复杂的应用场中,RSSI值转化的理论三维坐标与实际三维坐标之间的误差会增大,但是通过多组数据之间的拟合计算,可以实现简易、粗略的测距和定位功能。

图3 节点分布
5 结 语
本文从理论上提出了基于RSSI值的无线ZigBee测距定位技术,构建了基于RSSI的低成本三维空间定位模型,在实际操作中运用了CC2530测距定位模块实现方式。通过实际测试,对RSSI和距离公式的参数设置精确化,得到了RSSI值与三维坐标之间的关系;并且对实际数据和理论数据的误差分析以及对原始数据处理的方法得到进一步提升,为进行下一步的高精度定位提供了实际基础。虽然基于RSSI的测距定位在定位的精度和环境的选取时存在较大的限制和影响,但是由于模块简单易得及其本身提供的工具丰富,不需要额外的硬件和软件,因此在定位测距方面依然具有比较高的价值和选取余地。
