30倍轻小型变焦光学系统设计
2022-06-30李京宸
张 坤,曲 正,钟 兴,李京宸,张 茜
(1.中国科学院 光电技术研究所,四川 成都 610207;2.中国科学院 长春光学精密机械与物理研究所,吉林 长春 130033;3.长光卫星技术有限公司,吉林 长春 130102)
1 引 言
变焦光学系统调节凸轮能够使镜头的焦距连续地变化,从而使被观测物体的成像倍率连续地变大[1]。因此,变焦光学系统不仅可以对感兴趣的目标进行广域的搜索,而且还能进行精密的跟踪和详细的观察[2-3]。变焦光学系统在目标跟踪、无人机光电吊舱、安防监测以及摄影等诸多领域都得到了广泛的应用[4-6]。
变焦光学系统的变焦类型可分为4种:光学式变焦、机械补偿式变焦、双组联动式变焦和全动型变焦。同其他变焦类型相比,机械补偿式变焦光学系统通过改变变倍组和补偿组的相对位置,可以连续地改变整个光学系统的焦距,具有结构简单和研制成本低廉等优点。然而,机械补偿式变焦光学系统已经发展了几十年,却仍然存在大变倍比和轻小型的设计矛盾[7-9]。2019年,张健等[10]利用正组补偿结构设计了一款焦距为30~300 mm的机械补偿式变焦光学系统,通过引入非球面和渐晕的方法把整个系统的质量从937 g减小到了584 g,但整个系统的长度仍然高达330 mm,其凸轮曲线也出现了拐点。2020年,刘圆等[11]设计了一款焦距为50~1 000 mm的机械补偿式变焦光学系统,该光学系统由28片球面透镜组成,最大口径为100 mm,总长为399.9 mm。2020年,刘云鹏等[12]设计了一款50倍五组变焦光学系统,该系统的第二组元和第三组元是运动组元,第四个组元是一个可替换透镜组元。整个系统结构紧凑,但论文中并没有对该系统是否具有50倍连续变焦的功能进行分析。
为了解决机械补偿式变焦光学系统大变倍比和轻小型设计之间的矛盾,本文对大变倍比变焦光学系统的光焦度分配方式进行了理论分析,并利用平滑换根取段和变F数的方法来实现轻小型设计,从而提出了一种大倍率轻小型机械补偿式变焦光学系统设计方法,使用全球面透镜设计了一款焦距为7~210 mm的机械补偿式变焦光学系统,该变焦系统的最大口径为67 mm,全长为190 mm。
2 原 理
2.1 大倍率变焦光学系统的光焦度分配
机械补偿式变焦光学系统应用非常广泛,其光学系统仅有两条凸轮曲线,即一条直线和一条曲线。同双组联动型变焦光学系统和全动型变焦光学系统[12]相比,机械结构更加简单、研发成本更低。然而,机械补偿式变焦光学系统分为负组补偿式变焦光学系统和正组补偿式变焦光学系统两种结构,负组补偿式变焦光学系统的特点是整个光学系统的口径大、长度短,正组补偿式变焦光学系统的特点是整个光学系统的口径小、长度长[13]。机械补偿式变焦光学系统中,前固定组、变倍组、补偿组和后固定组的光焦度分配有多种形式[14]。
当密接薄透镜组位于空气中时,透镜组的位置色差和倍率色差分别为:
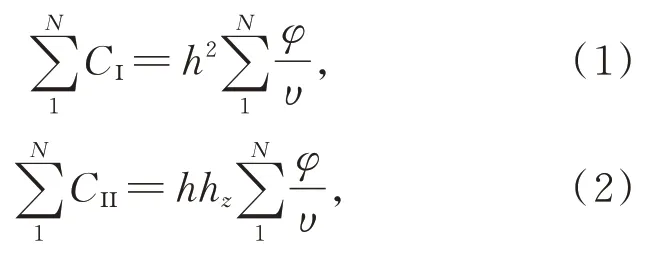
其中:N为薄透镜组中薄透镜的个数,φ为薄透镜的光焦度,υ为透镜的阿贝数,h为透镜的半通光口径,hz为主光线在透镜表面上的入射高度。根据式(1)和式(2)可知,变焦光学系统前固定组的口径越大,前固定组的色差越大。为了减小前固定组的色差,前固定组的光焦度越小越好,即焦距越大越好。
负组补偿式变焦光学系统的口径大、长度短。根据式(1)和式(2)可知,光学系统的口径越大色差越大,色差校正越困难。根据球差方程:

其中:n为透镜的折射率,i,i'分别表示光线的入射角和出射角,u为第一近轴光线的孔径角。变焦光学系统的口径越大,h越大,光学系统的球差越难校正。正组补偿式变焦光学系统的口径小、长度长。因此,与负组补偿变焦光学系统相比,正组补偿变焦光学系统对色差和球差的校正能力更强。综上分析可知,在不使用特殊光学元件的时候,正组补偿结构更适合大倍率变焦光学系统设计。
正组补偿式变焦光学系统前固定组的光焦度通常为正值,后固定组的光焦度可为正值也可为负值。当后固定组的光焦度为正值时,为了满足光焦度分配方程,前固定组的正光焦度将变小。由式(1)和式(2)可知,前固定组的光焦度越小,位置色差和倍率色差就越小。因此,后固定组的光焦度为正值的正组补偿式变焦光学系统更有利于色差校正。
综上所述,当机械补偿式变焦系统的前固定组、变倍组、补偿组和后固定组的光焦度分配分别为“+,-,+,+”时,更有利于大倍率变焦光学系统的像差校正。
2.2 初始结构计算
当机械补偿式变焦系统的前固定组、变倍组、补偿组和后固定组的光焦度分配分别为“+,-,+,+”时,变焦光学系统的变焦原理如图1所示。从图1可知,机械补偿式变焦光学系统有4个组元,分别为前固定组、变倍组、补偿组和后固定组,各组元对应的光焦度分别为φ1,φ2,φ3和φ4。当变焦光学系统位于短焦位置时,变倍组距离前固定组最近,补偿组距离后固定组最近。当变焦光学系统逐渐由短焦向长焦变化时,变倍组将逐渐向右远离前固定组,补偿组向左远离后固定组,最后变倍组和补偿组的距离达到最小值,此时光学系统的焦距最长。
在计算变焦光学系统的初始结构时,为了避免相邻组元在运动过程中发生碰撞,相邻组元之间必须留有足够的间距。这里利用高斯光学来计算变焦光学系统的初始结构[15]。

图1 正组补偿变焦光学系统原理Fig.1 Principle diagram of positive group compensation zoom optical system
在变焦光学系统中,假设变倍组和补偿组的归一化焦距分别为f2'和f3',根据长焦距时变倍组和补偿组的归一化倍率m2l和m3l,可得变倍组与补偿组之间的距离为:

变倍组从长焦距变化到短焦的总移动距离为:

短焦时变倍组的倍率为:

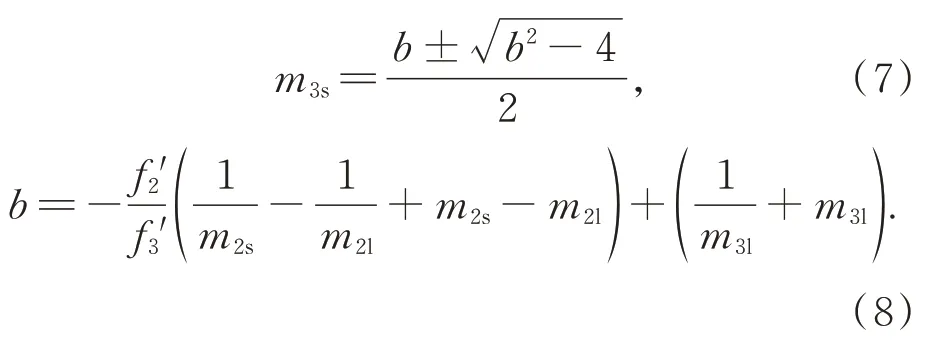
根据变焦微分方程可得短焦距时补偿组的倍率m3s:
补偿组从长焦距变化到短焦的总移动距离为:

变焦光学系统的总变倍比可表示为:
当变焦光学系统在短焦时,前固定组和变倍组的距离为d12s,补偿组与后固定组的距离为d34s,后固定组的倍率为m4s,则光学系统前固定组的焦距f1'为:

其中:l'3s表示光学系统在短焦时补偿组的像距。
根据式(7)可知,变倍组的一个位置对应补偿组的两个位置。因此,利用补偿组的这两个位置可以进行换根,变焦光学系统的平滑换根原理如图2所示。图中,A1-A2-A3为变倍组的运动轨迹,B1-B2-B3和C1-C2-C3为补偿组对应的两条运动轨迹。

图2 平滑换根原理Fig.2 Schematic diagram of smooth root exchange
若要保证补偿组的运动曲线不出现拐点,必须使补偿组的两条运动曲线相切以实现平滑换根,即在B2和C2处相切。此时,相切处补偿组的放大倍率m3m应满足:

平滑换根的补偿组仍然具有两条运动曲线,即B1-B2-B3和C1-B2-B3。从A1运动到A3的过程中,变倍组放大率的绝对值一直在增大。从C1运动到B2再运动到B3的过程中,补偿组放大率的绝对值也一直在增大。因此,当补偿组的运动曲线为C1-B2-B3时,光学系统可实现快速变焦。
综上所述,根据式(4)~式(13)并利用参数设定的方法,可计算出f1',f2',f3',f4'和各组元之间的距离。
3 变焦光学系统设计
3.1 设计指标
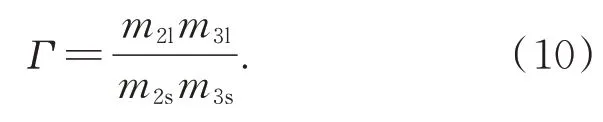
光学系统的设计指标与用户使用的要求和所选探测器的参数相关。本文所选探测器的像元尺寸为4.8μm×4.8μm,其对应的奈奎斯特频率为104 lp/mm。为了满足广域搜索和高分辨率观察的应用需求,变焦光学系统的详细设计指标如表1所示。
表1 变焦光学系统的设计指标Tab.1 Design parameters of zoom optical system
3.2 光学系统设计
根据2.2节可知,式(4)~式(13)属于欠定方程组,因此机械补偿式变焦光学系统的初始结构具有多重解。为了快速有效地解算出较佳的初始结构,本文提出了利用参数设定和光学设计软件联合解算的方法。解算步骤如下:
(1)为了实现补偿组平滑换根,以变倍组和补偿组的放大倍率为-1作为计算的起始状态,假设变倍组的焦距为-1,计算出补偿组的焦距、补偿组与变倍组的物像距离和它们之间的间距;
(2)设定长焦时变倍组的放大率,求取长焦时变倍组的物距、像距和沿光轴的移动量,再通过变倍比计算出短焦时变倍组和补偿组的放大倍率等参数;
(3)以起始状态为基准(变倍组和补偿组的放大率为-1),计算短焦时光学系统的参数;
(4)选取短焦状态,计算出前固定组的焦距;
(5)选取短焦状态,设定后固定组的放大率,再计算出后固定组的焦距;
(6)通过系统参数缩放,获得长焦、中焦和短焦时各组元之间的距离;
(7)把计算出的参数带入光学设计软件中,对系统的光阑位置和F数等参数进行优化,并保证光学系统结构紧凑和变焦曲线平滑无拐点。
利用上述计算方法,对30倍变焦光学系统的初始结构进行解算和优化,最后得到变焦光学系统中各组元的焦距,如表2所示。

表2 四组元的初始焦距Tab.2 Focal length of four groups in initial structure
变焦光学系统的焦距分别在7,60和210 mm处各组元之间的间距如表3所示。
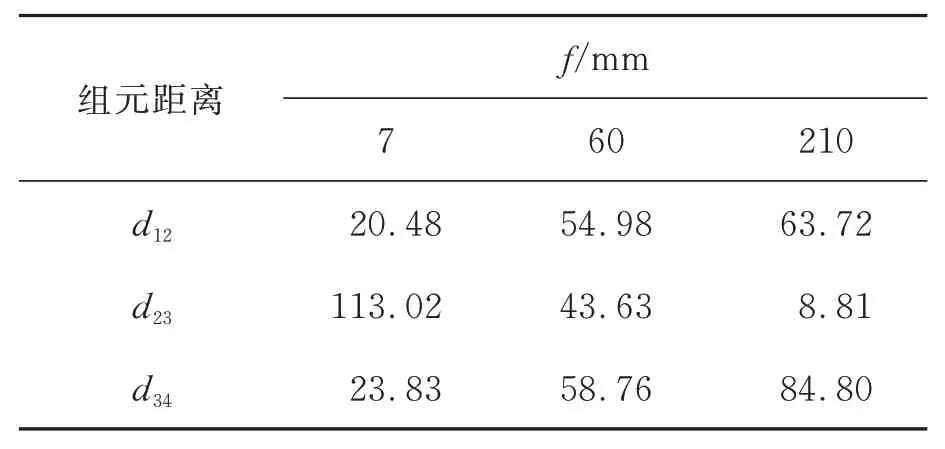
表3 四组元之间的间距Tab.3 Spacing between four groups
变焦光学系统的理想结构模型如图3所示。变焦光学系统的总长为180 mm,孔径光阑位于补偿组前方1 mm处。在连续变焦的过程中,孔径光阑与补偿组同步运动,孔径光阑的口径保持不变,光学系统的F数会随着焦距的变化不断改变。
从图3可知,光学系统的焦距从7 mm连续变化到210 mm的过程中,变倍组逐渐远离前固定组,补偿组逐渐靠近前固定组。在连续变焦的过程中,两条变焦曲线没有出现拐点。
把表2和表3中的数据代入光学设计软件中进行透镜替换,经过优化设计得到的变焦光学系统的结构如图4所示。变焦光学系统的全长为190 mm,最大口径为67 mm。
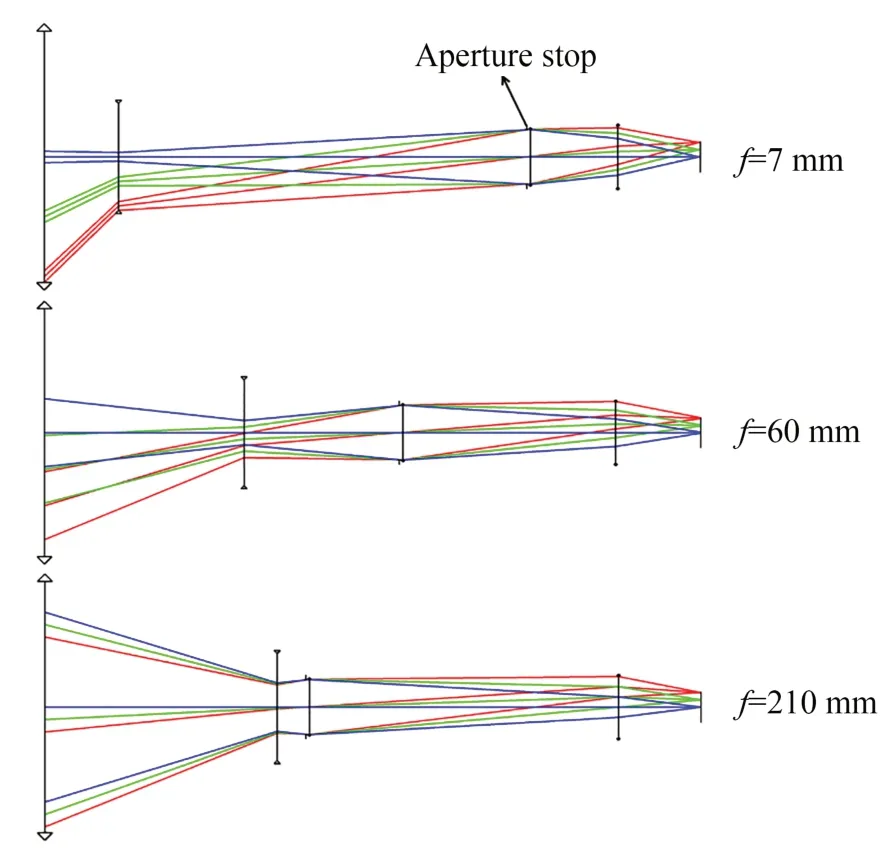
图3 变焦光学系统的理想模型Fig.3 Ideal model of zoom optical system
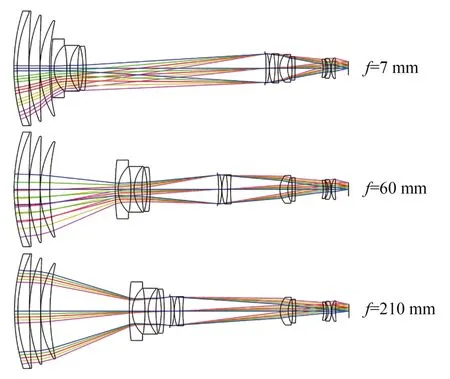
图4 变焦光学系统结构Fig.4 Structure diagram of zoom optical system
4 系统评价与分析
4.1 像质评价
调制传递函数(Modulation Transfer Function,MTF)、点列图和畸变是评价光学系统成像质量的重要指标。MTF表示光学系统成像的调制度变化情况,通过MTF曲线可以比较全面地评价系统的成像质量。图5为变焦光学系统的MTF曲线,由图5可知,当变焦光学系统的焦距分别为7,60和210 mm时,奈奎斯特频率104 lp/mm处全视场的平均MTF均大于0.25。
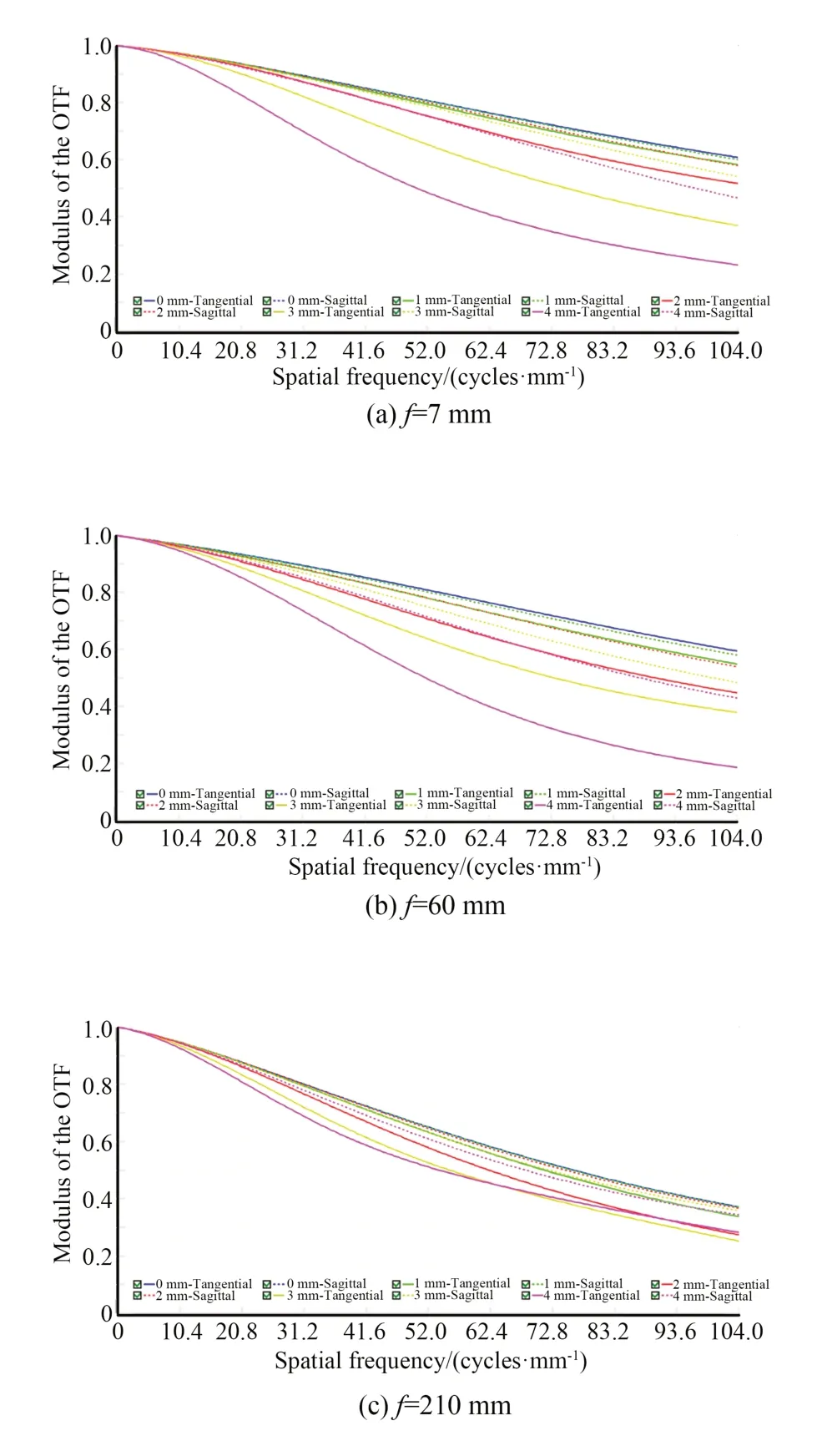
图5 变焦光学系统的MTF曲线Fig.5 MTF curves of zoom optical system
点列图可以比较准确地反应出光学系统成像光线的弥散情况。点列图中的均方根(Root Mean Square,RMS)弥散斑半径越小,光学系统的成像质量就越好。图6为变焦光学系统的焦距分别为7,60和210 mm时的点列图。
图7为变焦光学系统的焦距分别为7,60和210 mm时的场曲和畸变曲线。从图7可知,光学系统全焦段的畸变都小于3%。
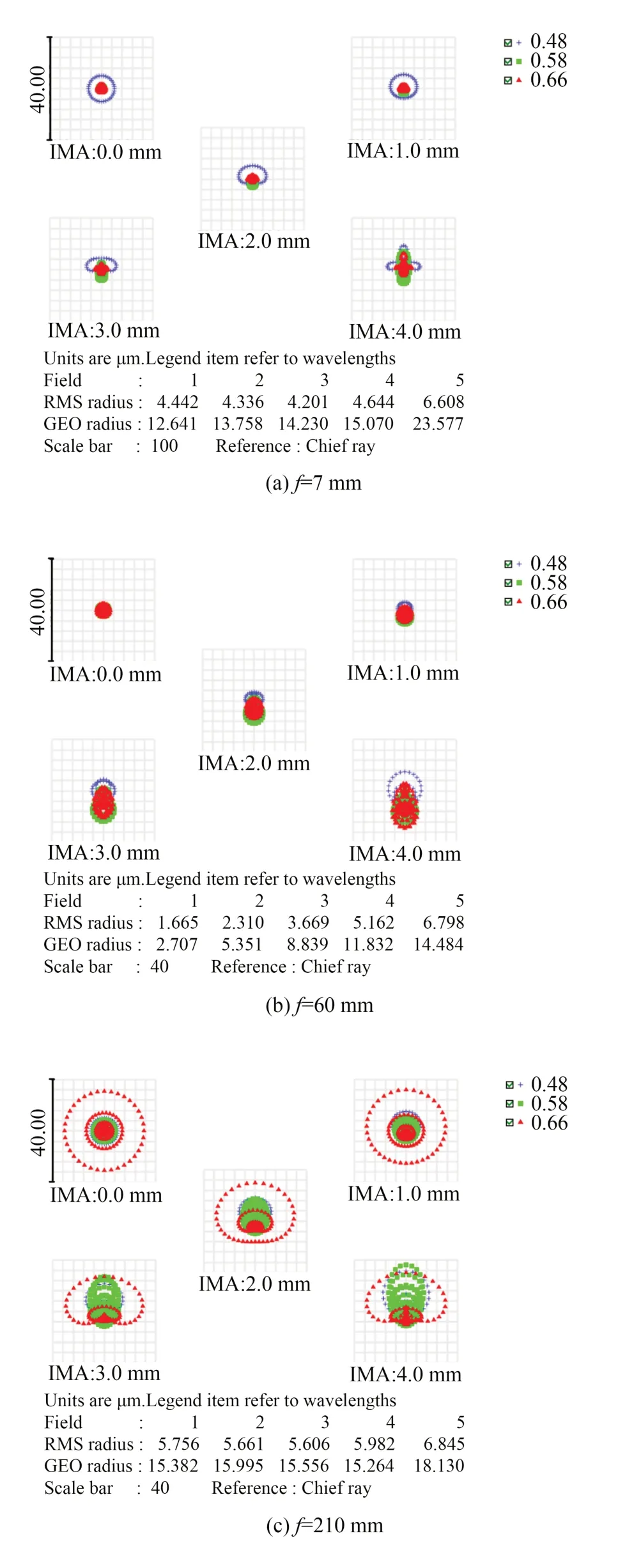
图6 点列图Fig.6 Spot diagram
4.2 公差分析
公差分析是变焦光学镜头加工装配前的重要分析环节之一,利用光学设计软件中的公差分析功能,可以快速有效地评估出变焦镜头的制造难度。综合考虑变焦光学系统在短焦、中焦和长焦处时各光学透镜的公差灵敏度,最终确定变焦光学系统的公差分配情况,如表4所示。

图7 场曲和畸变曲线Fig.7 Field and distortion curves
根据蒙特卡洛分析可得,当采用表4的分配公差时,变焦光学系统在奈奎斯特频率104 lp/mm处全视场的平均MTF分布规律如图8所示。蒙特卡洛分析表明,80%的系统在全焦段内的MTF均大于0.14。
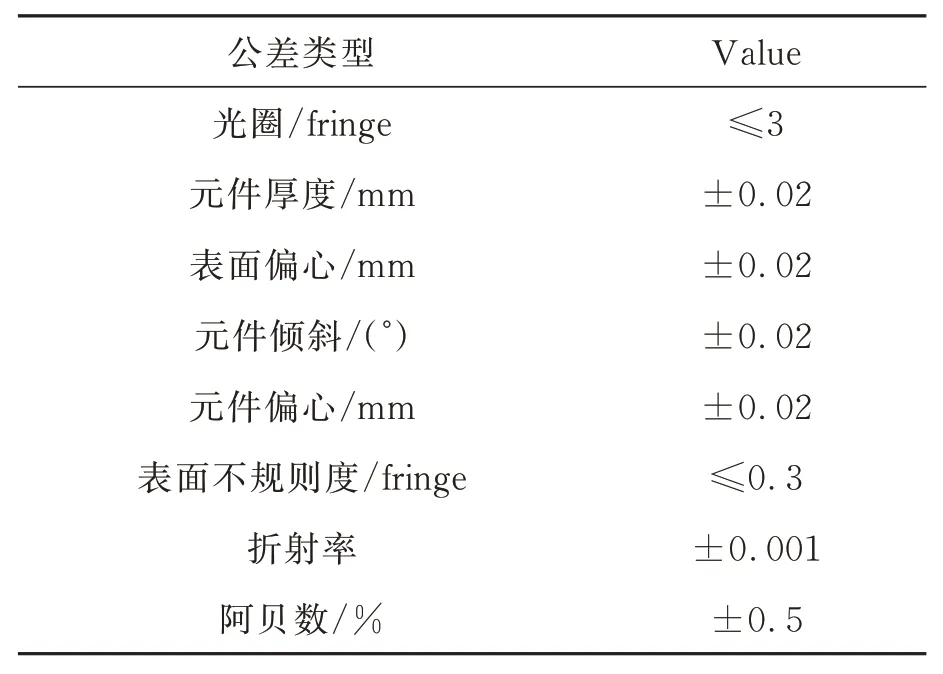
表4 变焦光学系统的公差分配Tab.4 Tolerance distribution of zoom optical system
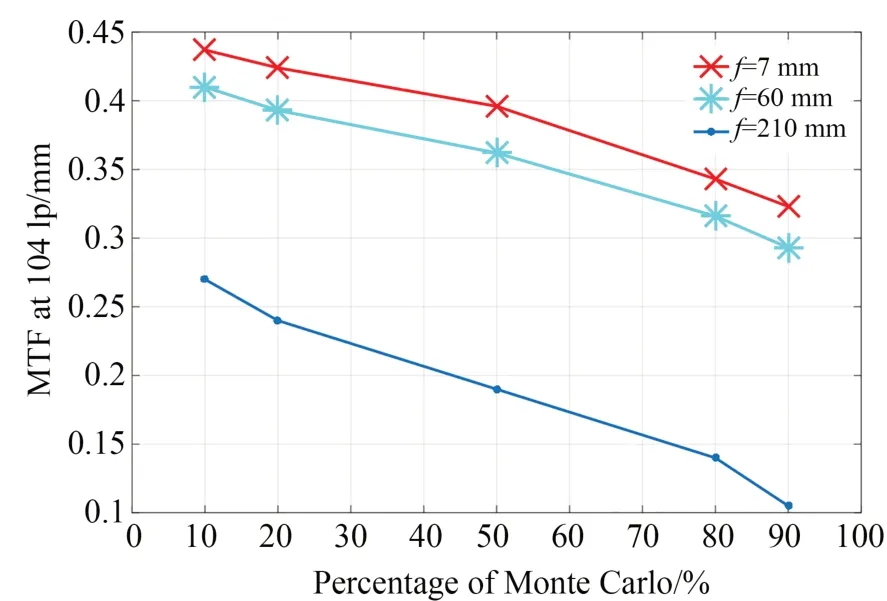
图8 蒙特卡洛分析概率Fig.8 Probability of Monte Carlo analysis
4.3 变焦曲线
在变焦光学系统中,若变焦曲线出现了拐点,极可能会出现变焦卡死的现象。因此,为了能够保证变焦镜头平滑变焦,变焦曲线尽量不要出现拐点[16-17]。此外,机械补偿式变焦光学系统在变焦曲线设计的过程中,为了降低凸轮的加工难度,一条变焦曲线设计为直线,另外一条变焦曲线设计为高次曲线。
本文的30倍变焦光学系统采用变倍组线性运动,补偿组非线性运动的方式进行连续变焦。当变焦镜头的凸轮直径为50 mm时,变倍组和补偿组与凸轮旋转角度的变化曲线如图9所示。

图9 凸轮拟合曲线Fig.9 Fitting cam curves
5 结 论
为了缓解机械补偿式变焦光学系统大变倍比和轻小型设计之间的矛盾,本文提出采用平滑换根的“+,-,+,+”光焦度分配方式,结合变F数的方法来实现轻小型设计,并提出利用结构参数设定和光学设计软件联合解算的方法,来合理地分配各组元的光焦度,保证变焦曲线平滑无拐点,从而快速有效地解算出变焦光学系统的初始结构参数,提高光学系统设计的成功率。利用全球面透镜设计了一款焦距为7~210 mm的30倍连续变焦光学系统,可匹配1/2英寸的探测器,该变焦系统的最大口径为67 mm,全长为190 mm,在奈奎斯特频率处全视场的MTF均大于0.25,该系统还具有全视场无渐晕、变焦曲线无拐点、制造成本低廉等优点,在目标跟踪、安防监测等领域具有广泛的应用前景。
