常导电磁型高速磁浮列车主动导向能力的评估与验证
2022-06-22翟明达朱朋博李晓龙龙志强
翟明达 ,朱朋博 ,,李晓龙 ,龙志强 ,刘 信 ,杨 宾
(1.国防科技大学智能科学学院,湖南 长沙 410000;2.63898部队,河南 济源 454650)
常导电磁型高速磁浮列车是一种新型轨道交通工具,利用电磁铁与轨道间的电磁吸力实现列车的主动悬浮与导向,因此,摆脱了传统轮轨列车的黏着限制、噪音振动以及车轨磨损,具有高速快捷、安全可靠、绿色环保、维护成本低等优点[1-3].为实现我国在高速磁浮领域的领跑,我国“十三五”交通领域科技创新规划明确提出,研究和发展高速磁浮交通系统是未来我国交通领域优先发展方向[4].2021年7月20日,具有我国完全自主知识产权的时速600 km常导电磁型高速磁浮交通系统在青岛成功下线.该列车能够有效弥补飞机与高铁之间存在的运行速度空白,有助于构建和形成我国高效便捷的高速客运交通体系.
常导电磁型高速磁浮列车线路转弯半径小,坡度大,线路条件复杂,实际运行速度高,列车为了能够顺利通过弯道并抵抗侧向干扰,必须依靠主动导向系统.文献[5]提出了磁悬浮列车新型导向电磁铁结构及其单体配置方式.文献[6]建立了双电磁铁导向系统模型.文献[7-8]研究了系统弯道运行时的导向特性.文献[9-11]设计了导向系统的鲁棒控制器和自适应控制器,使得在不同的干扰力作用下系统能保持一致的控制性能.文献[12]提出了一种可提高列车转向能力的改进方案,为改进高速磁浮列车的转向能力提供了一定的理论依据.
上述文献都是从导向控制器设计的角度对导向系统模型、控制策略、参数优化等某方面进行研究.然而,高速磁浮列车能否安全通过曲线线路不仅与导向系统本身的能力有关,还与线路半径、列车通过速度等因素密切相关.为了科学准确地分析和评估列车的导向能力,本文利用导向系统运行过程中获取的导向间隙、电流以及加速度等状态信息,基于模糊综合评价法提出了可量化的、适合于常导电磁型高速磁浮列车的评价标准.通过对导向系统在不同曲线半径、运行速度和有效载荷下的性能分析与评估,有效检验导向系统在不同线路条件下的导向能力.空气弹簧连接,悬浮磁铁、导向磁铁、制动磁铁按特定的分布方式安装在悬浮架上,高速磁浮列车主动导向系统由安装在轨道两侧的2个导向电磁铁、导向控制器及传感器组成,每节车共有32个导向单元,每个导向单元为一套完整的导向控制系统,图2为2个导向电磁铁组成的导向电磁铁模块.
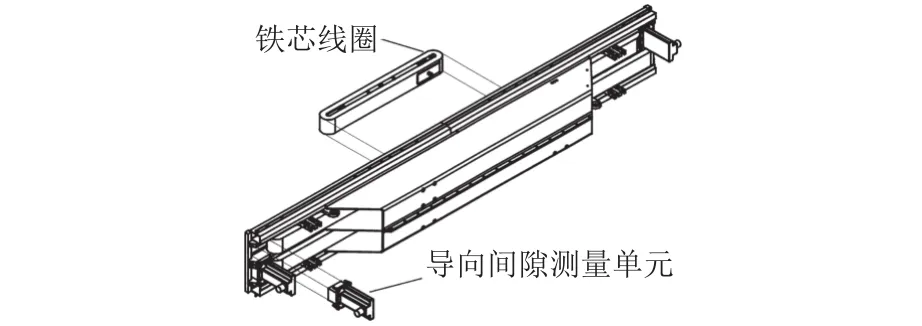
图2 导向电磁铁模块Fig.2 Module of guidance electromagnet
1 常导电磁型高速磁浮列车主动导向系统
同性磁极相互排斥,异性磁极相互相吸,常导电磁型高速磁浮列车利用导向电磁铁与导轨间的电磁引力实现列车的主动导向.导向系统模块工作示意图如图3所示,图中,PWM为脉冲宽度波.导向控制器根据导向传感器检测到的两侧导向电磁铁与轨道侧表面的间隙来调整导向电磁铁中的电流,保证两侧导向电磁铁与轨道侧面的间隙基本相等,使列车在侧向居于轨道中心线上,实现导向功能,保证列车可以顺利通过弯道并抵抗侧向干扰力.
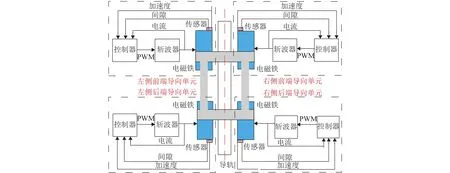
图3 导向模块工作示意Fig.3 Working diagram of guidance module
常导电磁型高速磁浮列车辆总体结构分为上下两层,以车厢为主的上层结构与轮轨列车基本相同,以悬浮架以及悬浮、导向、涡流制动系统为主的下层结构与轮轨列车完全不同.
常导电磁型高速磁浮列车总体结构如图1所示,每节车包含4个悬浮架,车厢与悬浮架之间通过
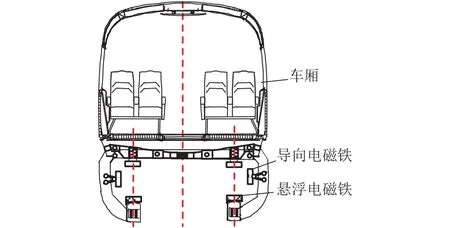
图1 车辆总体结构Fig.1 Overall vehicle structure
2 考虑线路变化的导向系统模型
高速磁浮列车车辆与轨道之间由于不存在接触与磨损,因此线路选线更加灵活.高速磁浮线路平面一般都由直线、圆曲线和缓和曲线组成,如图4所示.两条直线之间需要圆曲线连接,圆曲线的半径限定了高速磁浮列车的安全通过时速.为保证列车运行的平顺,在直线与圆曲线之间需要缓和曲线连接.
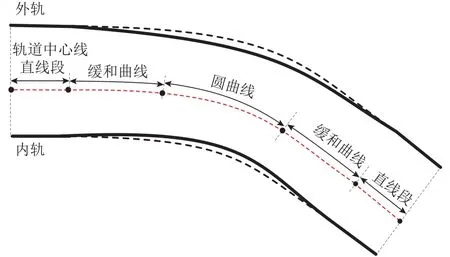
图4 高速磁浮线路平面曲线Fig.4 Plane curve of high-speed maglev line
由于高速磁浮列车能否安全通过平面曲线线路不仅与导向系统本身的能力有关,还与线路半径、列车通过速度等因素密切相关.因此,需要建立考虑线路曲线变化的导向系统模型,分析和研究主动导向系统在不同曲线半径、运行速度和有效载荷下的性能,检验导向系统在不同线路条件下的导向能力.
对于常导电磁型高速磁浮列车主动导向系统这个复杂的机电系统,在建立系统模型时为了降低微分方程阶次,降低求解难度,往往会忽略很多因素.本文假设悬浮间隙始终保持不变,悬浮电磁铁与转向架视为刚性连接,导向电磁铁与托臂也是刚性连接.
根据电磁学理论,导向电磁铁和导轨之间产生的电磁力为
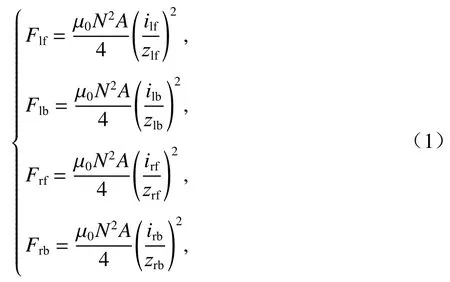
式中:F、i、z分别为导向电磁力、线圈电流和导向间隙,下标lf、lb、rf和rb分别表示左侧前端、左侧后端、右侧前端和右侧后端; μ0为真空中的磁导率;A为导向电磁铁的等效磁极面积;N为线圈绕组的匝数.
根据电路理论,导向电磁铁电压和电流的变化关系可以表示为
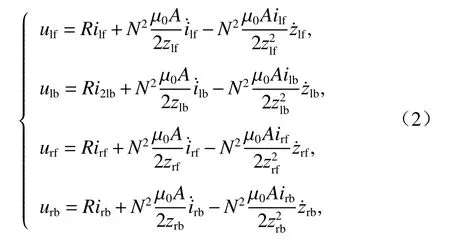
式中:ulf、ulb、urf、urb分别为左侧前端线圈电压、左侧后端线圈电压、右侧前端线圈电压和右侧后端线圈电压;R为导向电磁铁电阻.
考虑线路曲线变化,列车导向系统的动力学方程为

式中:m为系统质量;Iz为转动惯量;V为列车运行速度; θ 为轨道的横坡角; κ 为轨道的曲率; α 为偏航角;Fy为导向系统横向受到的合外力,包括导向电磁力、干扰力和重力;Mz为系统受到的合外力矩,包括导向电磁合力矩和干扰力矩.Fy与Mz的表达式为

式中:Fd为横向干扰力;Md为干扰力矩;r1、r2分别为系统两侧的相对力臂.
由式(1)~(4)能够建立出考虑线路曲线变化的常导电磁型高速磁浮列车主动导向系统的数学模型.
3 基于模糊综合评价法的导向能力评估方法
为了科学准确地分析和评估列车的导向能力,结合常导电磁型高速磁浮列车主动导向系统的工作原理与工程实际,从安全性、平稳性以及舒适性三个维度来评估主动导向系统的导向能力.而导向系统运行过程中利用传感器测量得到的导向间隙、电流以及加速度等量测数据能够准确地反映导向系统的工作状态与性能.因此,本文利用量测数据,基于模糊综合评价法建立评价指标和评价集,构建权重矩阵与隶属度函数,最终建立起适合于常导电磁型高速磁浮列车的评价标准.
3.1 评价指标和评价集
常导电磁型高速磁浮列车通过曲线时的安全性与导向间隙的最小值直接相关,其值越小说明列车偏离轨道中心线的距离越大,越有可能发生碰撞.列车运行过程中的导向间隙与导向电流的离散程度体现了导向系统的平稳性,其值越小说明列车越平稳.列车通过曲线时的舒适性与导向加速度的离散程度直接相关,其值越小说明列车上的乘车舒适度越高.因此,选取导向间隙的最小值、导向间隙的离散程度、导向电流的离散程度、导向加速度的离散程度作为导向系统的评价指标.
导向系统的因素集为U= {导向间隙最小值,导向间隙离散程度,导向电流离散程度,导向加速度离散程度}.
为了清晰地评价列车的导向能力,建立评价集B= {优秀,良好,一般,差}.
3.2 构建权重向量
参数C1、C2、C3、C4分别表示导向间隙最小值、导向间隙离散程度、导向电流离散程度、导向加速度离散程度,基于侯岳衡等[13]提出的指数标度法得到对应的评分结果,如表1所示.
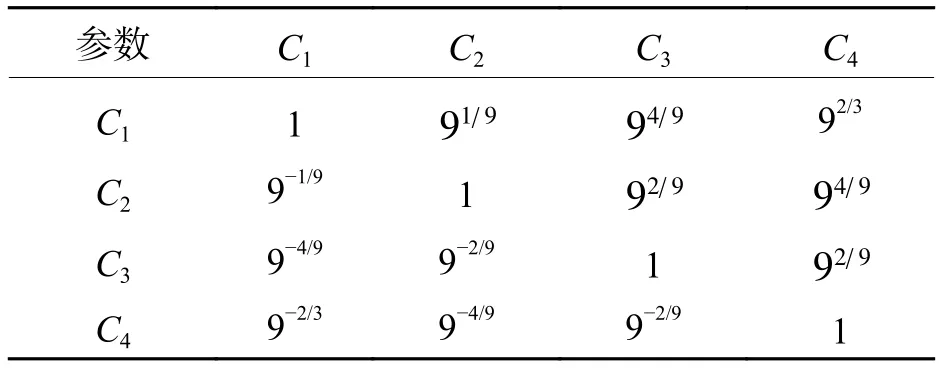
表1 评分结果Tab.1 Grading results
计算表1所示矩阵每一行元素的乘积,并对其取4次方根,归一化处理后得到权向量,经过一致性检验,权重向量为

3.3 构建隶属度函数
隶属度函数的构建采用模糊分布法,并选择梯形分布,计算简便、分布合理,适合作为常导电磁型高速磁浮列车主动导向系统的评价模型.隶属度函数如图5所示,x轴表示需要评判的某参数值,y轴表示某参数值的隶属度,值为0~1.
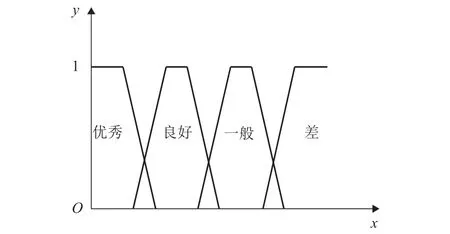
图5 隶属度函数Fig.5 Membership function
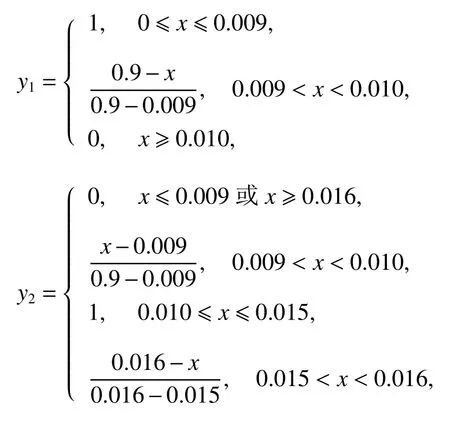
y1、y2、y3和y4表示评价集中优秀、良好、一般和差的隶属函数.关于“导向间隙最小值”评价集的隶属函数表示为

关于“导向间隙离散程度”评价集的隶属函数表示为
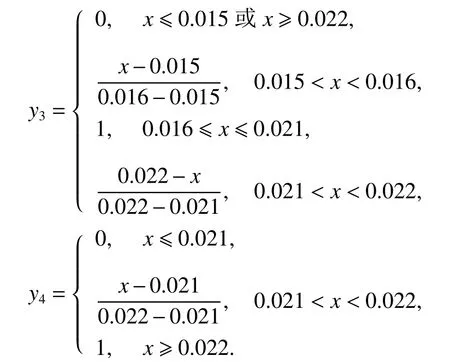
关于“导向电流离散程度”和“导向加速度离散程度”评价集的隶属函数表示为

综上,关于“导向间隙最小值”“导向间隙离散程度”“导向电流离散程度”和“导向加速度离散程度”评价集的隶属函数构建完毕.利用导向系统运行过程的量测数据就可以计算得到隶属度矩阵,将隶属度矩阵与前文所得到的权向量相乘,即可得到评估结果向量w,根据最大隶属度原则,通过查看评估结果向量中的最大值在评价集B中所对应的评语,即可得到对应的评价结果.
4 平面曲线条件下的高速磁浮列车导向能力的分析与评估
为了分析和评估导向系统在不同曲线半径、运行速度和有效载荷下的性能,有效检验导向系统在不同线路条件下的导向能力,本文基于建立的考虑线路曲线变化的导向系统模型,利用导向系统运行过程中获取的导向间隙、电流以及加速度等状态信息,通过前文建立的评价标准对高速磁浮列车的导向能力进行对比研究.
4.1 曲线半径不同时的导向系统性能
常导电磁型高速磁浮列车在标准载荷工况下,设定速度为60 km/h,分别通过曲线半径r为300、400、600 m的平面曲线线路时,导向间隙和电流如图6所示.

图6 曲线半径不同时的导向间隙和电流Fig.6 Guidance gap and current with different curve radiuses
导向控制器利用传感器检测到的导向电磁铁与轨道两侧的间隙,采用差动控制策略调整导向电磁铁中的电流,保证两侧导向电磁铁与轨道侧面的间隙基本相等,列车在侧向始终居于轨道中心线上.因此,当列车进入平面曲线线路时,右侧导向单元的电流会快速减少直至变为0,左侧导向单元的电流会快速增加来提供通过曲线所需的导向力;当列车退出平面曲线线路时,右侧导向单元的电流会快速增加到初始工作状态,左侧导向单元的电流会快速减小到初始工作状态;同时,通过不同曲线半径导向间隙的变化幅度以及所需的导向力不同,导致导向电流变化的幅度不同.半径越小,电流波动越大.
由于4个导向单元具有高度耦合性,这里以右侧前端导向单元为例,不再重复计算其他3个导向单元的评估结果.常导电磁型高速磁浮列车在标准载荷和设定速度条件下,分别通过曲线半径r= 300,400,600 m的平面曲线线路时,其评估结果向量分别为
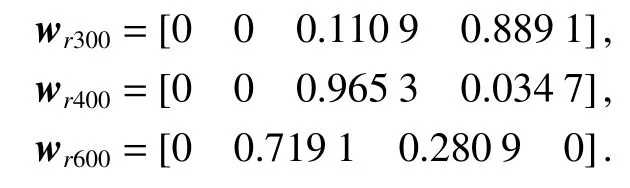
根据最大隶属度原则,通过查看评估结果向量中的最大值在评价集B中所对应的评语,即可得到对应的评价结果.当列车通过曲线半径为300、400、600 m的平面曲线线路时,评估结果向量最大值分别为0.889 1、0.965 3、0.719 1,对应的评价集评语分别为“差” “一般” “良好”.
线路曲线半径越大,常导电磁型高速磁浮列车主动导向系统的性能评估结果越好.结果表明在标准载荷和设定运行速度条件下,增大平面线路的曲线半径能够提高常导电磁型高速磁浮列车通过曲线线路时的导向能力,有利于列车的运行安全.
4.2 运行速度不同时的导向系统性能
常导电磁型高速磁浮列车在标准载荷工况下,r= 400 m,分别以列车运行速度V= 60,90,150 km/h通过曲线时,导向间隙和电流如图7所示.
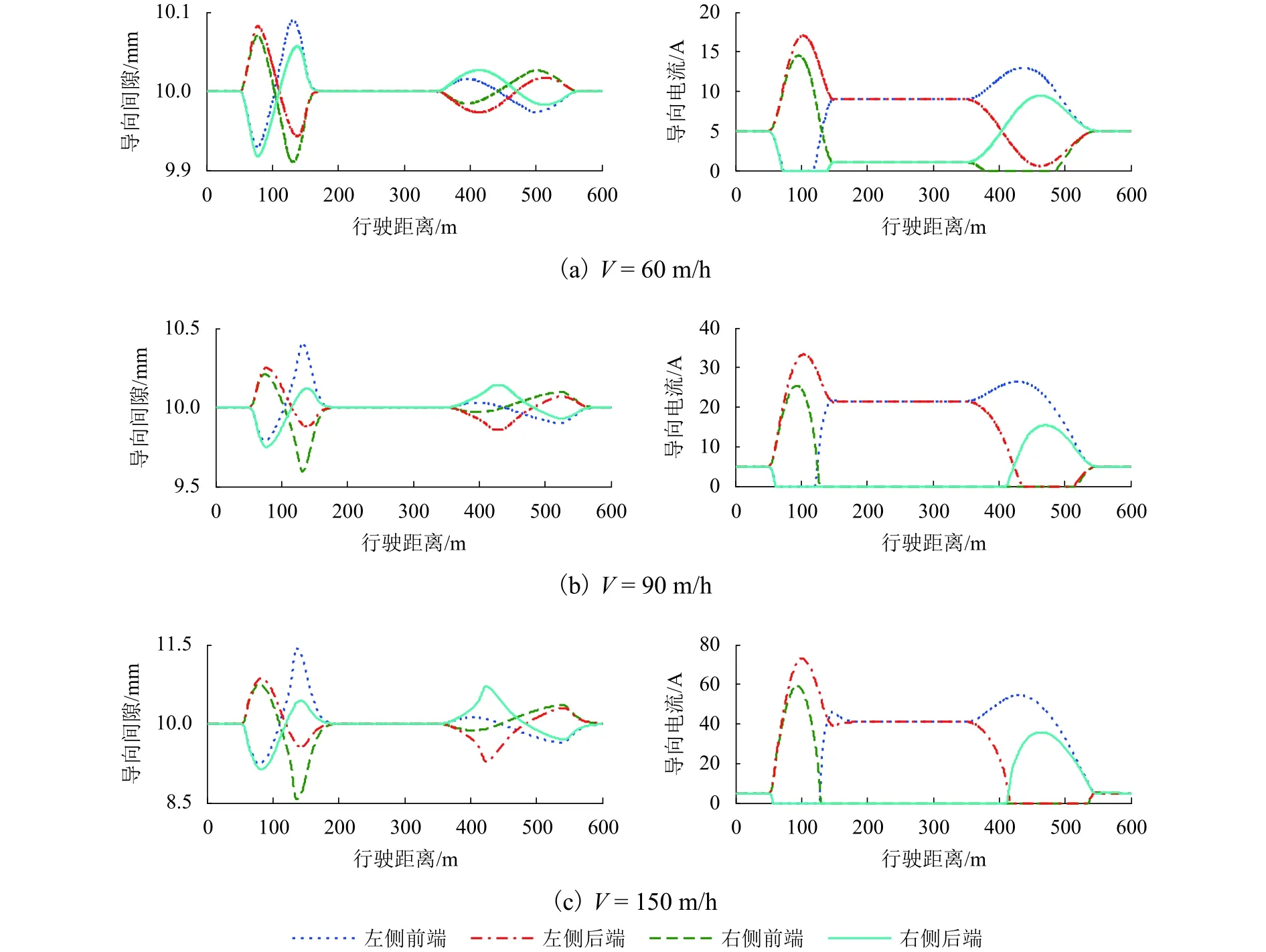
图7 运行速度不同时导向间隙和电流Fig.7 Guidance gap and current with different speeds
当列车以不同速度通过平面曲线线路时,导向间隙的变化幅度以及所需的导向力不同,导致导向电流变化的幅度不同.速度越快,电流波动越大.
常导电磁型高速磁浮列车在标准载荷和设定线路曲线半径条件下,分别以V=60 , 9 0 , 1 50 km/h通过曲线时,其评估结果向量分别为

当列车的运行速度分别为60、90、150 km/h时,评估结果向量最大值分别为0.889 1、0.399 2、0.889 1,对应的评价集评语分别为“优秀” “良好” “差”.
列车运行速度越快,常导电磁型高速磁浮列车主动导向系统的性能评估结果越差.因此,在标准载荷和设定线路曲线半径条件下,提高列车通过曲线线路时的运行速度会直接减弱常导电磁型高速磁浮列车的导向能力,损害列车的运行安全.
4.3 载荷不同时的导向系统性能
r= 400 m,V= 60 km/h,常导电磁型高速磁浮列车在标准载荷、载荷增加25%和载荷增加50%工况下的导向间隙和电流曲线如图8所示.
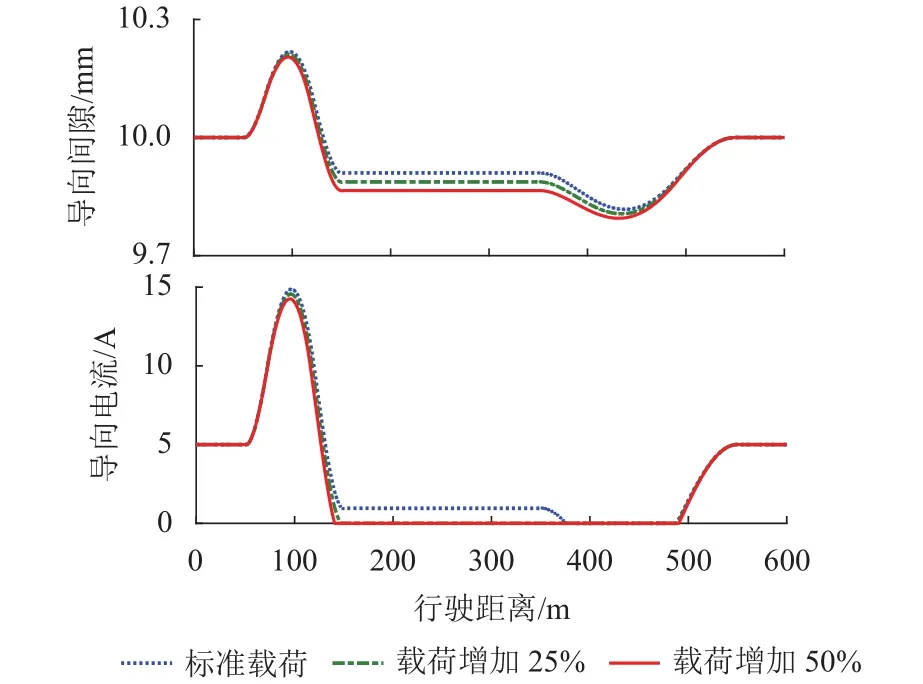
图8 载荷不同时的导向间隙和电流Fig.8 Guidance gap and current with different loads
当列车以不同载荷通过平面曲线线路时,右侧导向单元的电流应该快速减小,同时左侧导向单元的电流应该快速增加.载荷M越大,这种变化越明显,直至右侧前端导向单元的电流变为0.
常导电磁型高速磁浮列车在设定运行速度和线路曲线半径条件下,标准载荷、载荷增加25%和载荷增加50%的工况下的评估结果向量分别为
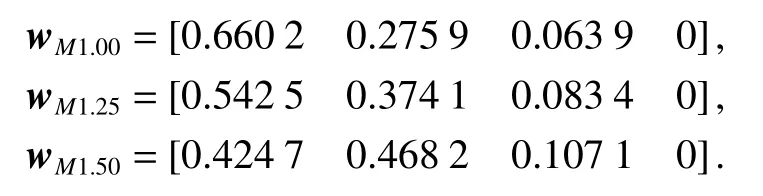
在标准载荷、增加25%载荷、增加50%载荷工况下,评估结果向量最大值分别为0.660 2、0.542 5、0.468 2,对应的评价集评语分别为“优秀” “优秀”“良好”.
随着载荷的增加,常导电磁型高速磁浮列车主动导向系统的性能评估结果开始变差.因此,在设定运行速度和线路曲线半径条件下,增加列车通过曲线线路时的载荷会直接减弱常导电磁型高速磁浮列车的导向能力,损害列车的运行安全.
4.4 实际线路测试
本文利用上海同济大学嘉定校区1.5 km高速磁浮试验线开展实际线路测试,如图9所示,一节完整的时速600 km高速磁浮原理样车正在线路上进行动态测试.由团队研制的常导电磁型高速磁浮列车导向单元为列车提供主动导向能力.为进一步验证实际线路条件下列车的导向能力,选取一个悬浮架上的右侧前端导向单元记录车辆运行时的导向间隙、导向电流等实际运行数据.

图9 同济大学高速磁浮试验线Fig.9 High-speed maglev test line at Tongji university
列车在标准载荷工况下,在牵引系统的作用下以时速35 km通过一段曲线半径为400 m的路段,导向间隙和电流曲线如图10所示.
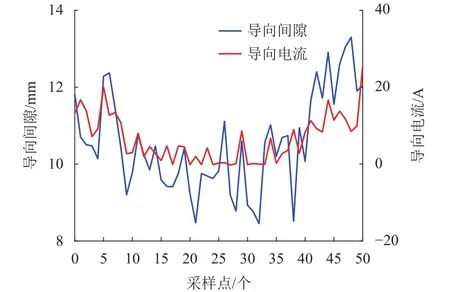
图10 实测运行中的导向间隙和电流Fig.10 Guidance gap and current in measured opertation
基于本文提出的模糊综合评价法的导向能力评估方法,利用导向间隙、电流以及加速度等实际运行数据,参照前文建立的评价标准对列车的导向能力进行分析和评估,其评估结果向量wt为

根据最大隶属度原则,实际线路测试的评估结果向量最大值为0.594 7,对应的评价集评语为“优秀”.
5 结 论
1) 在标准载荷和设定运行速度条件下,增大平面线路的曲线半径能够提高常导电磁型高速磁浮列车通过曲线线路时的导向能力,有利于列车的运行安全.
2) 在标准载荷和设定线路曲线半径条件下,提高列车通过曲线线路时的运行速度会直接减弱常导电磁型高速磁浮列车的导向能力,损害列车的运行安全.
3) 在设定运行速度和线路曲线半径条件下,增加列车通过曲线线路时的载荷会直接减弱常导电磁型高速磁浮列车的导向能力,损害列车的运行安全.
综上,线路平面的曲线半径应因地制宜、由大到小合理选用,对运行速度有限制的曲线半径宜集中使用.