智能建造
——工程机械智能化
2022-06-18吴军凯朱敏言
陆 亮, 吴军凯, 孙 宁, 朱敏言
(1.同济大学 机械与能源工程学院, 上海 201804;2.浙江大学 流体动力与机电系统国家重点实验室, 浙江 杭州 310027)
引言
随着科学技术的进步,第四次工业革命带来了物联网、云计算、人工智能、信息物理系统等信息化技术的迅猛发展,推动传统建筑业向“智能建造”的方向发展[1-2]。智能建造目前尚未形成被广泛认可的定义,总体上可以认为是“一种基于智能科学技术和组织管理技术的新型建造模式,通过改变建筑物建造时全生命周期过程的组织方式、生产工具,使建造系统有类似于人类智能的各种能力,从而实现更安全、更高效、更优质、更快速、更绿色的建造过程”[1-3]。
如上所述,智能建造包含两方面,一方面是以智能科学技术为主导的各种生产工具的智能化,包括生产、运输、施工、装配,以及装修、检测、安防等,另一方面则是生产组织方式的提升,通过管理方式的智能化,实现对建筑全生命周期建造过程中的设计、制造、质量控制、人员设备管理等全面的监控与优化,从而提高建造过程的组织管理水平以及决策能力。
1 智能建造
1.1 智能管理技术
智能管理技术以建筑信息模型(Building Information Modeling,BIM)技术为代表,BIM是一种借助多维数据对项目全生命周期阶段信息进行整合的数字化工具,可为建筑工程预测项目进度、信息交互、精细化管理提供数据支持。BIM技术自2003年于美国开始应用,后续在日本、欧洲、韩国均得到推行,我国自2003年引进BIM技术,纳入国家“十一五”、“十二五”、“十三五”建筑业发展规划当中,BIM技术已成为全球趋势[4]。使用BIM进行现场施工的模拟图,如图1所示。
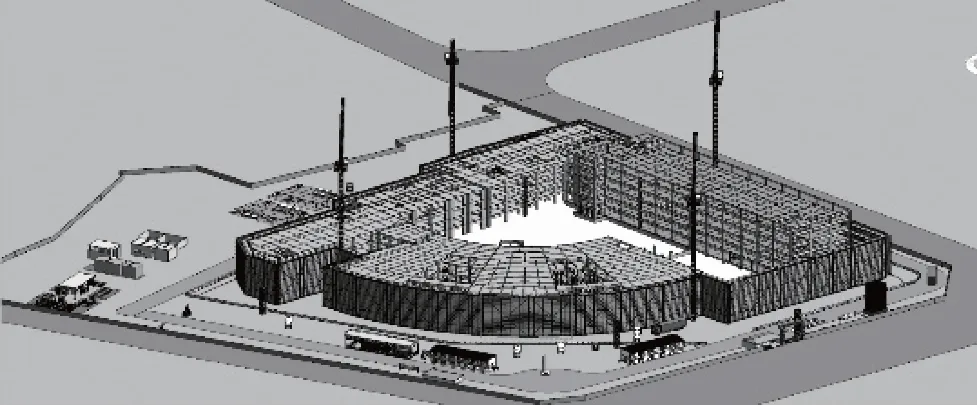
图1 使用BIM进行现场施工模拟Fig.1 Use BIM for on-site construction simulation
1.2 智能科学技术
智能建造的科学技术包括生产、施工(土建)、装配、装修、检测和安防等。生产技术包括预制化生产房屋、桥梁等,通过智能管理技术的配合,实现高效的标准化生产,并且支持特别的定制生产。
土建一般指建筑、构筑物等的一次建设,如降水、挖土方、打地基、浇筑柱梁板墙等围护结构的浇筑与砌筑工程及其配套的钢筋、简单装饰等。土建施工的智能化,一方面要优化工作模式,包括改进建造模式以及优化管理技术,另一方面要提高生产工具的技术水平,应用工程机械智能化技术。
装修是指对建筑物的内、外进行改造、修理、整复等工程活动[6]。采用智能设备进行建筑装修的主要手段和内容包括:建筑物内部的瓷砖铺设、喷涂、抹灰等工作;增加建筑物外部的幕墙等维护结构等。2014年新加坡ETH中心发布了其研制的瓷砖自动铺贴机器人,通过机械手臂,可以实现自动涂胶、精准自动铺贴、振捣压实等工作[7]。南洋理工大学研发的内墙喷涂机器人Pictobot提高了25%以上的喷涂效率,降低了对喷涂人员的要求[8]。
智能检测是指在建筑施工完成后或施工进行过程中进行的,利用机器人、传感设备等对生产设备、设施与环境以及施工效果和质量等进行检测的过程,包括作业场所危害因素检测、设备状态检测、生产成品探伤等,如斜拉大桥使用缆索爬升机器人自动检测缆索的内部与表面病害[9],使用探测机器人进行沥青路面养护智能检测与决策[10],使用多种定位方式进行塔机状态检测等[11]。
安防的智能化是指借助于仪器、传感器、探测设备等迅速而准确地了解生产系统与作业环境中的危险因素,并通过具有一定决策能力的智能控制系统进行处理的过程,包括对生产设备的安全情况进行检测与报警,对生产过程中的有关数据进行安全情况分析与报警[12],减少或避免因设备损坏、人员误操作、无关人员破坏等造成的损失。
本研究主要针对智能建造中的智能土建工具,即工程机械智能化技术进行简要的叙述。
2 工程机械智能化
工程机械智能化将信息技术、智能控制技术、计算机技术等集合在机械设备中,融合了多信息感知、故障诊断、高精度定位导航等技术的新型施工机械[13]。我国于20世纪末,在科学家蒋新松的倡导下,从工程机械机器人化、挖掘机智能化、推土机智能化和自动牵引车技术4个方面开始研究。按智能对象数量划分,包括单机智能化与机群智能化2个层面。单机智能主要包括无人驾驶技术、机器视觉技术、人工智能技术、智能自动控制技术等。机群智能则交叉运用统计、运筹、计算机、人工智能等多学科技术,从整体上优化机群作业管理方式,从而达到节约、高效、优质的作业效果[4]。近年来的先进产品有结合了计算机视觉、人工智能等技术的百度无人挖掘机及AES系统[14](如图2所示),Built Robotics公司的无人自主挖掘机器人等[15]。
本研究以工程机械典型代表挖掘机为例,从智能化分级的定义开始,引入现阶段各科研单位和公司研究应用的进展,并从液压技术和定位技术2个层面,介绍支撑工程机械智能化的技术进展。
2.1 智能技术分级
工程机械自主作业的研究一直是近年来的研究热点,但对于不同级别的自主作业的定义却没有一个准确的说法。工程机械包含的种类繁多,挖掘机、装载机、吊机等这些常见的种类其作业方式和移动特性也大不相同,因此概括地对工程机械进行自主作业级别的定义是困难的。以建筑施工中很重要的土方作业为例,多位研究者对土方作业中主要使用的挖掘机的自动化升级进行了研究,并对其自主作业级别做相应的定义。DADHICH等[16]对土方作业机械自动化升级的各项关键技术进行详细的调查,将远程控制视为一种自动作业的阶段,并且在附近遥控和控制室控制是不同的。提出了实现全自动作业的5个阶段:

图2 百度无人挖掘机作业系统Fig.2 Autonomous Excavator System (AES) from Baidu
(1) 手动操作:驾驶员在机舱内手动完成所有操作;
(2) 近距离遥控操作:驾驶员在挖掘机附近通过遥控手柄目视完成所有操作;
(3) 远程离遥控操作:驾驶员在远处的控制室通过视频监控完成所有操作;
(4) 远程辅助操作:驾驶员通过辅助功能远程完成大多数操作,重要的任务需要驾驶员手动介入;
(5) 全自动操作:自主作业系统完成所有操作,驾驶员只提供高层次指令以及错误和紧急情况的处理。
HASHIMOTO等[18]在此基础之上与一些项目负责人、建筑工人和工程师合作,提出了土方作业系统分解图和土方作业机器的自动作业级别,如表1所示,以美国汽车工程师学会(SAE)发表的汽车自动驾驶级别标准SAE J3016为参考,将其中的条目替换为相应工程作业机械,形成了挖掘机的自主作业级别。
SAE J3016标准中,自动驾驶的级别从4个方面衡量:车辆运动控制,物体和事件检测(ODER),动态驾驶任务处理(DDT fallback),可操作区域(ODD)。这4个方面是从由驾驶员还是系统完成,或者是否有限制,来确定其对应的自动驾驶级别。
类比挖掘机,相应的概念则是:机器控制,高效施工的检测和判断,作业失败的响应和施工场景的条件限制。挖掘机自主作业分级如表1所示,单个作业动作,如移动、挖掘、回转的自动化则达到1级自主作业,但这些动作的控制点、时间、完成条件等需要驾驶员输入;多个连续动作的自动完成达到2级自主作业,如土方作业的典型工作循环:挖掘-抬起回转-卸载-返回;当系统能够自主计算动作,决定最优的作业方式时,驾驶员便不再关心是否高效,达到3级自主作业;4级自主作业限定某种场景,对施工条件有一定要求,如地形、天气等,能对突发事件进行自主处理;而5级自主作业则面向开放场景。远程操作不被视为一个阶段,因为远程可以附加在任何一个需要驾驶员的级别之上,驾驶员的工作条件会变好但所做的事情并没有改变。类比挖掘机自主作业级别的定义,可以将该定义推广到各类工程机械。
综上所述,挖掘机从现在的纯人工操作机械化作业到实现完全智能的自主作业,首先会经历辅助阶段,系统为驾驶员提供机器作业的辅助信息助其准确高效地操作,进而能够自动控制一些简单重复的动作,如固定深度挖掘、固定高度距离卸载、固定斜率切削等;其次是半自主作业,由操作员设定高阶的指令之后可以完成一系列复杂的动作,如挖掘-抬起回转-卸载-返回,驾驶员不必关注具体的高度、距离等参数,系统会为作业规划最优的方式,但是有任何程序以外的情况发生还是必须驾驶员介入;自主作业则意味着完全脱离驾驶员, 当系统遇到任何意外情况均能从中断恢复作业。自主作业从有限场景到开放场景,需要更加智能的系统的支持,面临巨大的挑战。单机的自主作业通过互相的联通可以形成整个施工现场的集群自主作业,各机器之间互相配合,由系统统一进行规划调度,这能极大提升整体的作业效率。
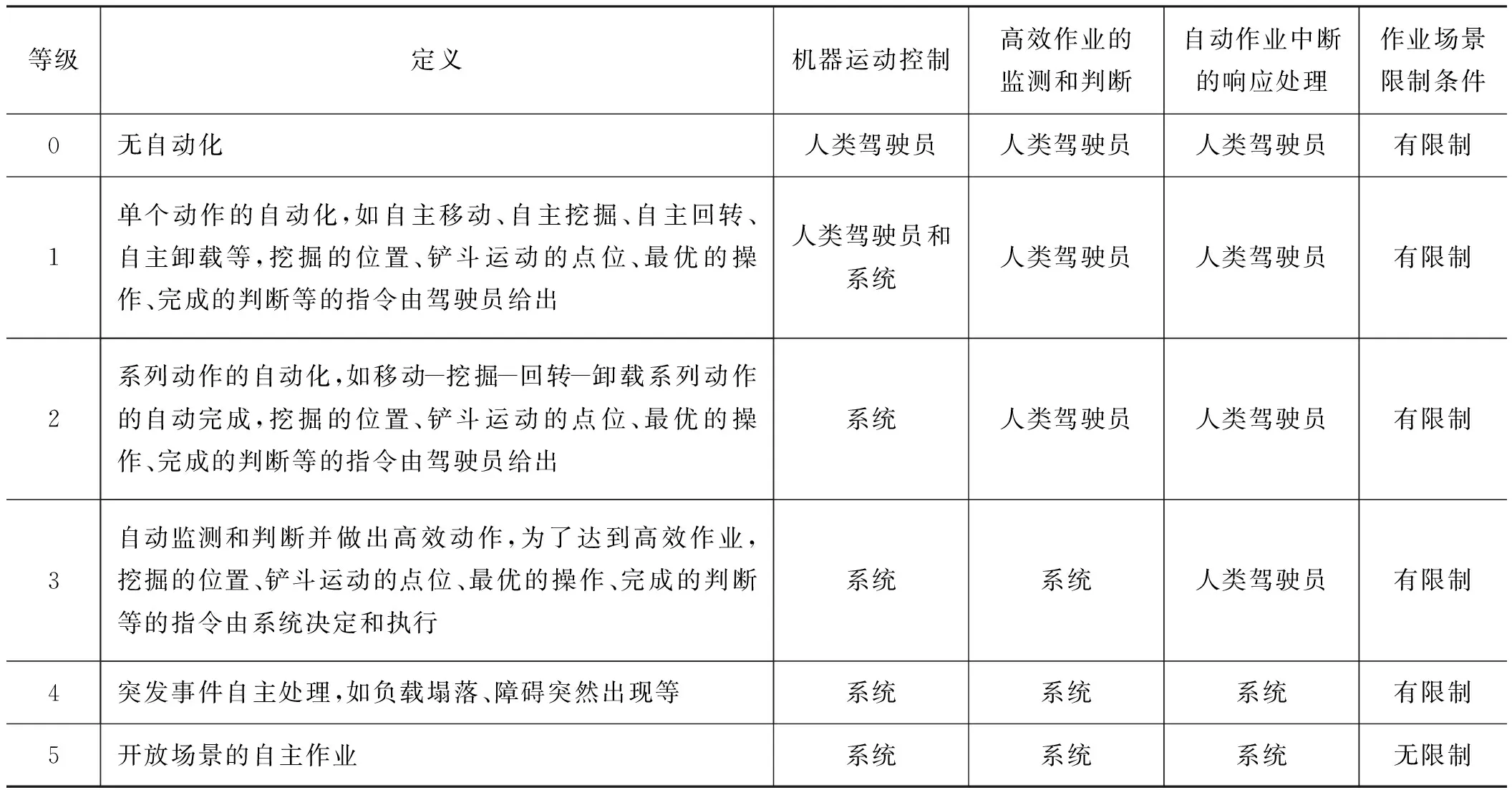
表1 挖掘机自主作业分级Tab.1 Levels of automation for excavator
对各类工程机械自主作业相关技术进行研究是目前的一个热点,主要集中在半自主向部分自主作业迈进的阶段。HALBACH等[19]对装载机进行自动化改造,使用GNSS、IMU和轮速传感器进行机器的定位,用2D激光雷达来获得施工场地表面的点云数据;在无障碍和短距离的施工场景中,装载机被手动驾驶到此处并面向瓦砾堆,在图形操作面板手动指定装载和卸载的区域之后,剩下的工作将自动规划完成;实现了一个基本的自主作业测试系统,主要针对自主驾驶进行了研究,在装载策略等自主作业方面还存在一些问题,铲斗动作的定位和控制也有不足。HASHIMOTO等[18]对挖掘机进行自动化改造,使用IMU测量动臂、斗杆和铲斗的姿态,旋转编码器测量履带角度,GNSS对机器的全局坐标进行定位;安装激光轮廓曲线测定仪和立体视觉相机为自主作业系统的安全监测和路径规划提供信息;此外,还使用MATLAB联合VREP对挖掘机的控制、路径规划、环境感知等算法进行计算机仿真验证,为自主作业挖掘机的研究提供软件与硬件相结合的平台。
百度研究院和马里兰大学合作研究的AES系统[14]是首个能够在真实世界长时间处理多种作业任务的挖掘机自主作业系统。该系统的感知模块能融合多个传感器的数据,还包括先进的物体检测和纹理检测算法,结合基于学习和优化的运动规划技术,在长时间的废料处理测试中,该系统的作业效率达到了熟练驾驶员的水平。
ETH Zurich和Moog公司共同研究的自主作业轮式挖掘机HEAP[20](如图3所示)装备GNSS定位设备,并使用RTK技术校准GNSS的结果;安装在各个机械臂上的IMU和执行器上的拉线传感器结合,用来估计末端铲斗的姿态;2个激光雷达为系统感知模块提供信息;此外,还将该挖掘机的液压系统改为电驱动先导级伺服液压系统,该自主作业挖掘机在实际的斜坡构建、石墙堆砌等作业中的测试展现出很高的精度和控制性能。
而在实际商用的系统中,自主作业仍停留在辅助驾驶员的阶段。卡特彼勒Cat Grade[21]挖掘机辅助驾驶系统可以根据驾驶员定义的深度和斜度参数辅助控制机械臂, 驾驶员只需要使用1个操纵杆即可控制整机精挖掘,减少操作的错误,提升45%的操作效率,其铲斗辅助功能可以自动保持铲斗的设定角度。Novatron的辅助作业系统Xsite[22]提供可定制的功能,可以很方便将现有挖掘机升级,如控制机械臂的运动和速度、运动边界。BuiltRobotics同样推出了可供现有挖掘机升级的辅助系统(如图4所示)[15],通过设定参数即可控制挖掘机自动按照路径进行动作,但只适用于挖沟这类简单重复动作。

图3 轮式自动挖掘机-HEAPFig.3 Autonomous walking excavator-HEAP

图4 BuiltRobotics自主作业系统Fig.4 BuiltRobotics autonomous operating system
2.2 智能挖机液压技术
目前工程机械所使用的液压系统主要是手柄控制的先导比例液压系统,驾驶员通过手柄控制阀口开度进而控制输出流量,改变执行器的速度。挖掘机通常采用正流量、负流量、负载敏感液压系统,根据系统的状态调节变量泵的输出,使其与负载所需的流量匹配,减少系统的溢流损失进而提高能量利用效率[23-26]。这些系统的设计是以手动控制为目的,使用的控制阀以液控比例阀为主,存在滞后和死区,响应性能较差,在快速的自动控制中不能较好的跟踪输入信号,控制效果较差。比如卡特彼勒某挖机在自动平整作业中曾出现抖动的问题,是因为比例液压系统频响不足。
对于大型机器还会使用安装电动先导阀[27-30]的方法,这样可以利用现有的液压系统的主阀等元件。CANNON等[31]研究的25 t自动装载系统(ALS)正是用这种方式设计的自动装载的挖掘机。有越来越多的公司开始在产品上安装电动先导级的阀组,原因是除了可以直接在现有液压系统的基础上进行改装以外,这些升级也可以为产品提供更多的功能。三一重机在其全电控挖机中也采用同样的电控主阀设计,同时使阀芯的设计通用化,在保证系统成本大幅降低的同时也能赋予挖掘机产品自身性能极大的灵活性。
再者,提升液压系统控制性能最直接的方式就是选择伺服液压系统,伺服系统有更高的响应速度和控制精度,其动态性能可以满足非常复杂且高速的运动控制。波士顿动力公司的人形机器人Atlas即由伺服液压系统驱动,在先进的控制算法的控制下可以完成后空翻和跑酷等高难度动作[32]。HEAP[20]自主作业挖掘机使用基于电机直驱伺服阀开发的集成控制模块,在油缸上集成了微控制器、压力传感器和伺服阀,在响应时间和控制精度上都达到很高的性能。但是将伺服液压系统运用到工程机械中也存在许多问题:伺服阀价格昂贵,大型设备所需的伺服阀更是如此;同时其对使用环境要求严格,而工程机械正是在恶劣的环境中工作,这对整个液压系统的防护设计又提出很高的要求。在这样的技术背景下,在比例阀技术和伺服阀技术之外,又出现了吸收两者优势的电液伺服比例阀技术。由比例阀发展而来的伺服比例阀,利用比例电磁铁或电机作为能量转换器驱动阀芯移动,阀芯的实际位移通过高分辨率的位移或转角传感器反馈到集成控制器中,通过调节电流使阀芯的位移偏差不断校正。该伺服比例阀无零位死区,频响较一般比例阀高,可靠性比普通伺服阀高[33-34],相比一般的伺服阀平衡了性能和使用成本。
除了对液压系统本身进行更多的研究,在现有元件的基础上进行控制算法的研究也是一个重要的研究方向。广泛使用的PID控制虽然具有算法简单、鲁棒性好的特点,但在实际的使用中,由于比例电磁阀的非线性特性[35],参数固定不变的PID控制器无法很好的跟踪输入,控制效果并不理想。在实际应用中,可以将模糊控制等智能控制算法与PID控制相结合,实现PID参数的自动调整[36-38]。对于比例电磁阀的死区建模,利用速度和控制电流的关系进行前馈控制也是一种常用的方法。周翔等[39]对比例电磁阀的死区特性建立线性模型,在调速控制时前馈控制模块根据目标速度换算为控制电流,使得速度控制误差缩小,提高了系统的控制精度和动态性能。建立速度-电流的非线性模型采用手动识别的方式非常耗时且容易出错,NURMI等[40]提出速度前馈学习方法,根据速度和位置反馈自动学习死区模型,同时使用了多段死区模型,可以更好的表示非线性特性。三一重机在进行传统液控主阀的电控化升级过程中,将主阀设计极简化、通用化,而电磁比例阀的相应算法开发则成为重要的开发方向,传统液压系统所简化的功能以及由高加工工艺支撑的控制特性要求全部转变为软件算法替代,降低硬件成本的同时还能够满足客户的定制需求,而不是传统液控主阀通过阀口设计等硬件的改变来定制挖掘机性能。这些方式与提升液压元件性能的方式相比,对元件的性能要求降低,减轻了成本压力,但需要大量的数据采集、模型识别等工作,结合现在快速发展的机器学习等方法可以取得更好的效果。
2.3 智能挖机定位技术
无人驾驶的挖掘机要使用合适的技术方案替代驾驶员的作用,完成整个作业流程中的视觉定位工作,包括整机的自主驾驶和自主挖掘。自主驾驶是在整个施工环境中,根据作业任务规划自主移动到目标任务区域,需要掌握周围的环境信息以及自身所处的位置,也就是同步定位与建图技术。环境信息主要包括地形数据和障碍物数据,目前主要使用的环境信息收集技术是摄像头和激光雷达的多传感器融合技术[41],摄像头低成本且信息量大,但容易受光照、尘雾等的影响,而激光雷达相比相机不容易受环境影响,将两种传感器的数据融合处理,可以得到更优的效果。环境信息实时在视觉处理系统中进行识别,得到的地形数据和障碍物数据等作为路径规划条件,为机体规划一条到目标位置的合理的移动路径,再控制执行器进行移动。但环境信息不只能为路径规划提供信息,结合不同时刻的数据,还可以计算当前机体相对于环境的姿态,同时融合多种传感器的定位数据,能够做到相当精确的定位。常用于测量姿态的传感器主要有惯性测量单元,其通过内部加速度计和陀螺仪的测量,能够精确感知机身的姿态[42];基于载波相位差分技术,能够实时提供站点在指定坐标系中的三维定位结果,能够达到厘米级精度。
无人挖掘机的传感器配置,如图5所示。自主挖掘的过程为:机体移动到目标位置,底盘保持不动而工作装置自动完成作业任务。该过程以环境感知为基础,进行任务计划、轨迹规划,并通过控制系统和执行器实现目标任务[14]。作业过程中各执行器和末端机构的精确定位保证任务的顺利实施,挖掘机的工作装置是一个四自由度的机械臂,各个关节均为旋转关节,因此测量出每个连杆当前的角度并结合已知的连杆长度可以计算出末端的位姿[43]。常用的角度测量传感器为倾角传感器和角度编码器。
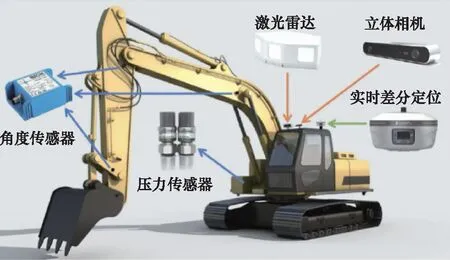
图5 无人挖掘机的传感器配置Fig.5 Sensor configuration for automation excavators
在作业过程中对障碍物和目标物纹理的识别,主流的技术是基于深度神经网络的图像识别技术,用大规模数据集对神经网络进行训练之后,对采集的数据在线进行识别。此外,有的研究团队也会使用基于深度学习的视觉方法估计挖掘机工作装置的姿态[44-45]。
3 结论
建筑业的智能化升级是大趋势,智能建造包括生成组织方式和管理方式的智能化,以及生产工具的智能化。工程机械作为土建环节的重要工具在手动到全自主作业的升级过程中,会经历辅助、半自主和自主作业(驾驶)等阶段,每个阶段人类驾驶员的参与都会减少,乃至最终完全消失。
实现完全自主的集群化作业,将大大减少对于人力的需求,并达到最优的作业效率。液压系统作为驱动工程机械的核心模块,必须提高数字化水平和控制性能以应对无人和自动化的要求。电控先导级是一种可以在现有液压系统上直接应用的改进方法,但比例阀自身的动态响应并不能满足自动控制的要求。伺服阀动态性能高,但价格昂贵,电液伺服比例阀技术吸收两者的优势,平衡了性能和使用成本。除了液压元件性能的提升,还可以应用更先进的智能控制算法以及通过算法补偿比例阀的缺陷等。
工程机械自主作业不可缺少定位模块,保证系统时刻知道机器在现场的位置以及自身各机构的姿态。摄像头、激光雷达、惯性测量单元和载波相位差分等技术是目前主流的定位技术,相应的设备配合计算机视觉、机器学习等软件技术,可以精确测量机器当前的位置。机器各机构决定末端执行机构的姿态和轨迹,挖掘机机械臂的姿态测量主要采用倾角传感器,对各个机械臂的姿态进行解算并结合机械臂的运动学方程计算末端运动。
