基于MATLAB 的无人机俯仰通道内回路设计与仿真
2022-05-30詹福宇
徐 亮 詹福宇 赵 健
(中电科特种飞机系统工程有限公司,四川 成都 611731)
无人机控制律设计是保证无人机能够自主、平稳飞行的核心,分为俯仰通道、滚转通道、偏航通道控制律设计,每个通道分为内回路和外回路设计。本文以无人机的俯仰通道内回路为例,利用matlab 软件建立无人机内回路开环和闭环模型,选择不同的内回路参数,将所有参数对应的频域特性、时域特性以图形方式进行可视化呈现,根据频域、时域特性选择参数进行阶跃响应分析,确保控制系统最优。
1 内回路模型及控制参数
无人机俯仰通道通常采用角度驾驶仪,其结构如图1 所示。thetag 为指令俯仰角(由外回路如速度回路、高度回路产生),theta 为无人机俯仰角、Ktheta 为俯仰角控制参数;q 为无人机俯仰角速度、kq 为角速度控制参数。无人机输入为俯仰通道舵面指令,图中-1 定义为负的俯仰舵面产生正的俯仰力矩。

图1 无人机内回路结构图
当无人机需要进行机动时,外回路产生的俯仰角指令thetag 与无人机当前俯仰角theta 的差值乘上控制参数Ktheta 转化为俯仰角速度指令;俯仰角速度指令与无人机当前俯仰角速度的差值乘上控制参数Kq 形成舵面指令从而控制无人机进行机动。
2 内回路开环、闭环模型建立
利用matlab/simulink 建立内回路开环模型及闭环模型,如图2、图3 所示。其中舵机模型考虑角速度限幅为300/s,角度限幅250及50ms 延迟。
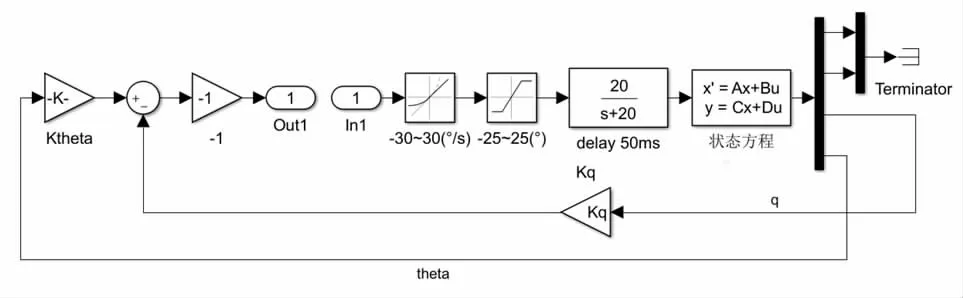
图2 俯仰通道内回路开环模型
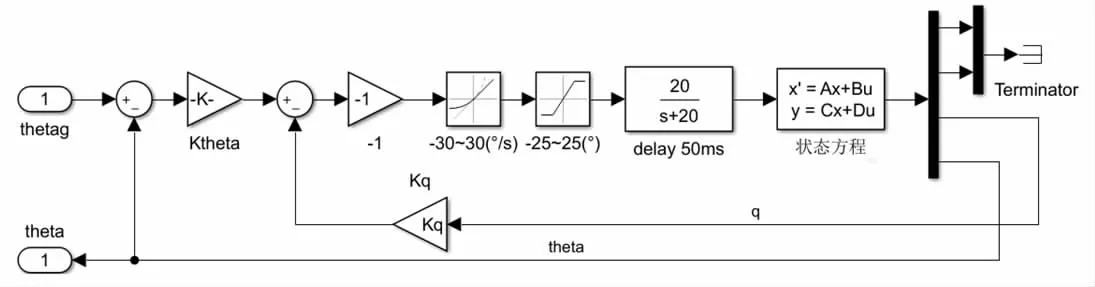
图3 俯仰通道内回路闭环模型
3 仿真结果分析
3.1 参数选择
选择俯仰角反馈系数Ktheta 范围为0.1~1.5,间隔为0.05;俯仰角速度反馈系数Kq 范围为0.1~1.0,间隔为0.05。
3.2 频域特性
由图4 可得,在上述Ktheta、Kq 选择范围内,幅值裕度均为无穷大;由图5 可得,相位裕度范围在600~1200之间。根据自动控制原理,在所有参数下,控制系统均稳定。
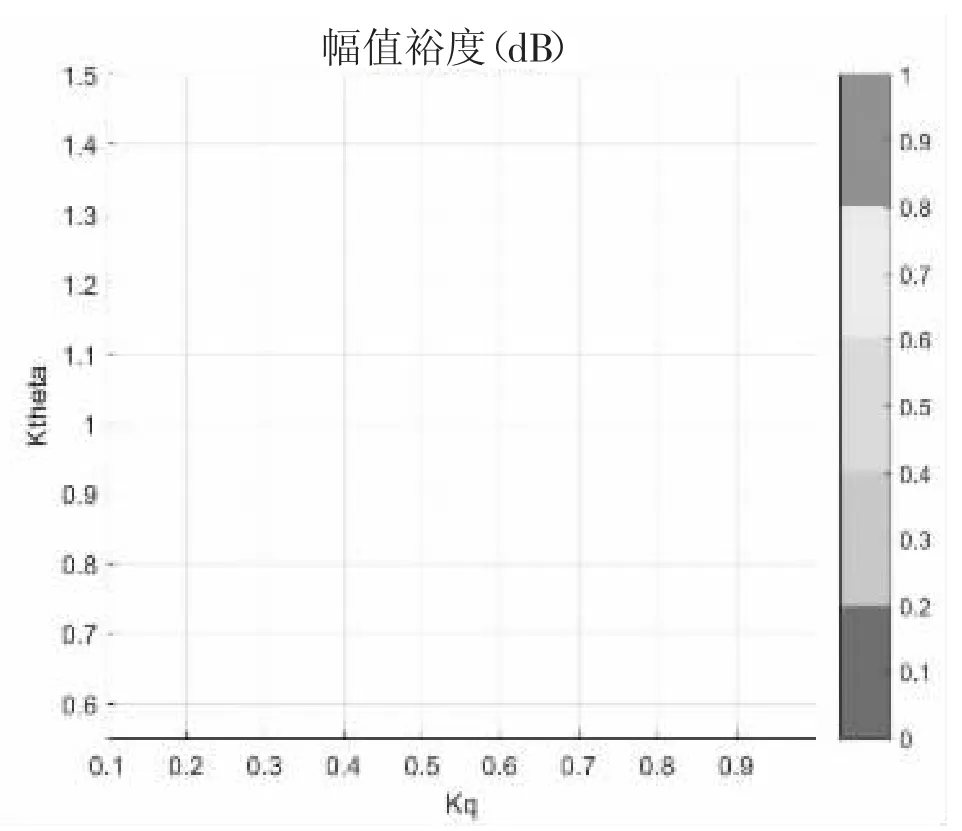
图4 幅值裕度计算结果图
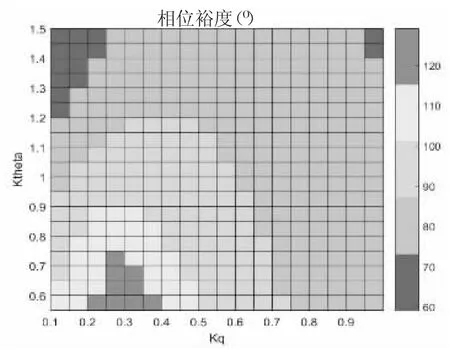
图5 相位裕度计算结果图
如图6 所示,系统带宽在0.2Hz~1.0Hz 之间,带宽随着角速度反馈系数Kq 的增大而减小,随着俯仰角反馈系数Ktheta 的增大而增大。
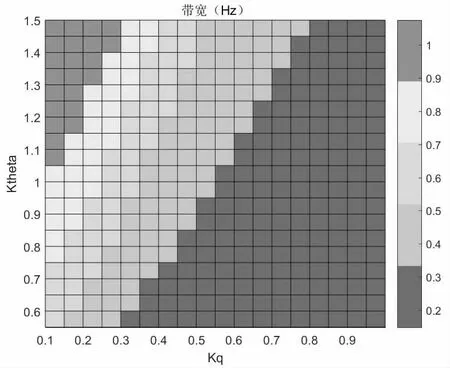
图6 带宽计算结果图
3.3 时域特性
如图7 所示,在上述Ktheta、Kq 选择范围内,上升时间范围在0.4~1.8s;如图8 所示,调节时间范围在38 ~42.5s 之间。

图7 上升时间计算结果图
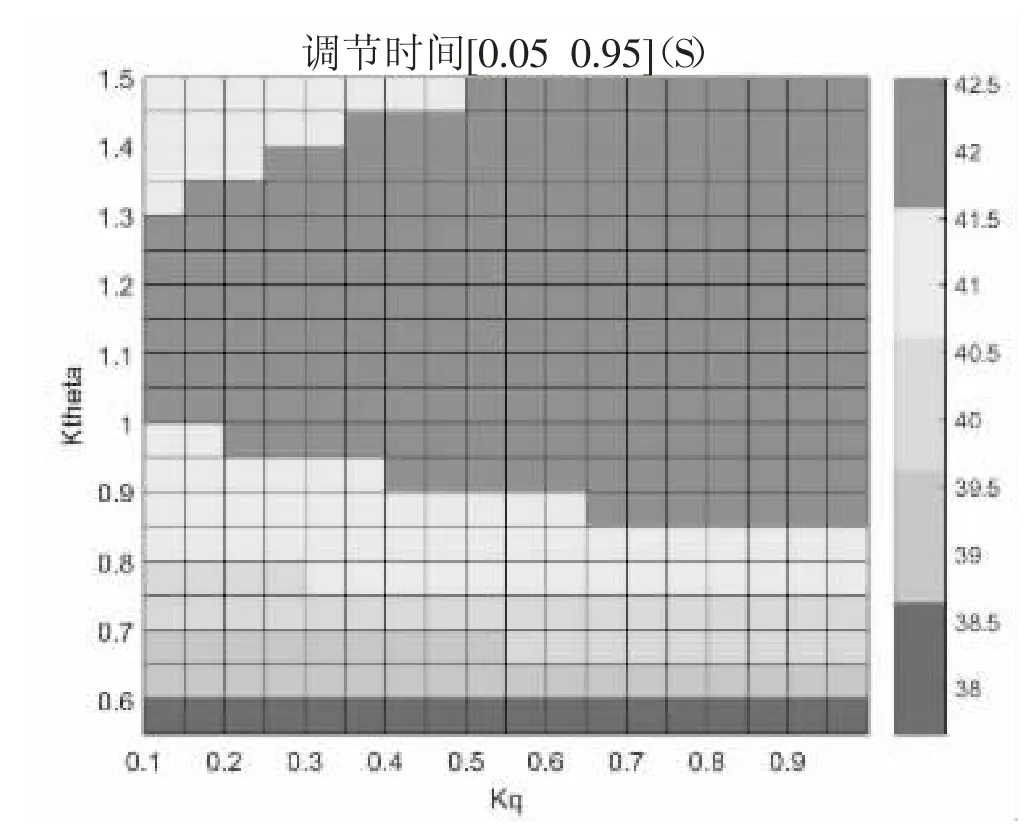
图8 调节时间计算结果图
由图9 可得,超调量范围在30%~70%之间,随着俯仰角反馈系数Ktheta 增大而减小。
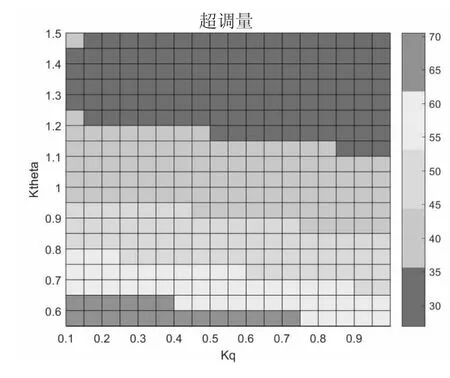
图9 超调量计算结果图
3.4 参数选择
综上分析,考虑无人机系统的快速响应及稳定性,选择Ktheta 为1.0,Kq 为0.26。选定参数后,开环模型根轨迹如图10 所示,系统阻尼为0.692。
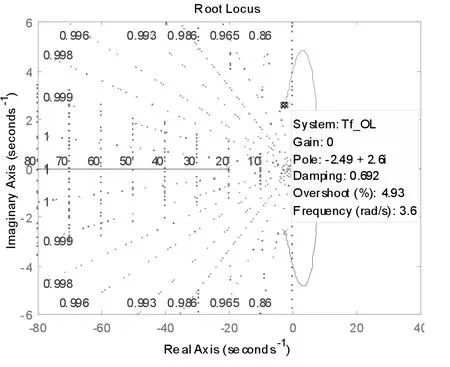
图10 根轨迹计算结果图
系统单位阶跃曲线如图11 所示,稳态值为0.67。表明选择的控制参数Ktheta、Kq 参数合理,系统稳定,响应正常。
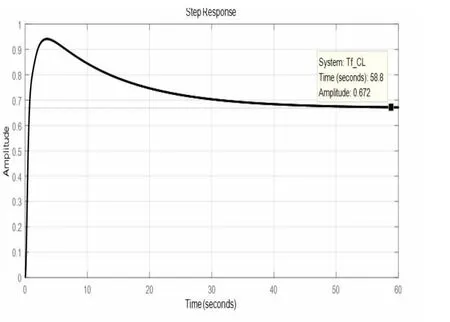
图11 系统阶跃响应图
4 结论
本文利用matlab 软件建立了内回路模型,计算了不同控制参数对无人机内回路频域特性及时域响应的影响,最后考虑系统的响应速度及稳定性要求选择了合适的控制参数,并根据选择的控制参数计算了系统阻尼及绘制了单位阶跃响应曲线,表明所选择的控制参数合理可行、系统稳定、响应满足要求。
本文由于篇幅有限只选取无人机一个状态点进行内回路设计,实际中需根据无人机不同的状态点进行频域特性及时域响应分析,最终选择的参数需满足无人机所有状态的飞行。
