负载质心位置对并联八杆隔冲平台隔冲性能的影响
2022-05-24赵斯洋孟宪松
赵斯洋,孟宪松,梁 松
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 引言
惯性导航系统(负载)能为舰船在不接收外界信息的情况下提供精准的速度、位置、姿态,是实现舰船长久作战和导弹、鱼雷等超视距攻击武器精准打击的重要设备。其工作原理是:加速度计与陀螺仪配合检测舰船的线加速度和角加速度,然后用积分算法计算舰船的姿态、位置与速度[1]。
承受水下非接触性爆炸是所有舰船均不可避免的,强烈的冲击激励会导致加速度计与陀螺仪产生误差,随着时间的推移,惯性导航设备将失去作用[2]。此外,强冲击甚至能够击穿静电场致使惯导系统彻底失效。为此,舰船的惯导系统需要隔冲平台对其进行保护[3]。
国内外学者对并联隔冲装置进行了大量研究,其中温肇东等[4]对软特性刚度在被动式Stewart隔冲平台中进行了应用研究,结果表明,软特性刚度与线性刚度相比,其可以在位移响应幅值基本不变的同时,有效地降低设备加速度响应幅值;张春辉等[5]研究了被动式Stewart隔冲平台的刚度特性,建立了平台运动微分方程,并分析了各方向的刚度特性,结果表明,隔冲平台的冲击隔离率为横向大于纵向大于垂向;Kamesh等[6]通过连续梁单元搭建了一种并联隔冲平台,研究轴向和径向刚度特性,将其用于卫星干扰隔离源;Thaijaroen[7]通过对六参数橡胶隔冲器的研究,对特殊弹簧、光滑接触装置等特殊结构改进创新,考虑非线性特性,分析隔冲器的隔冲传递率;Chi等[8]建立基于音圈电机的主动Stewart隔冲平台,运用Newton算法对其动力学模型进行控制运算,使用对比试验的方法证明该隔振系统的有效性;高鹏等[9]对八连杆抗冲击隔离器进行了设计与性能分析,得出该隔离器的垂向、横向、纵向隔离效果满足抗冲击要求;刘慧珍[10]对多杆隔冲装置动力学特性进行了分析,仿真结果与理论结果契合度高,表明理论模型具有有效性。
综上所述,目前基于并联平台开展的隔冲特性研究理论基础较多,但对并联八杆隔冲平台负载特性的研究较少,因此,本文设计了一种并联八杆隔冲平台,建立了动力学模型,进行了仿真计算,探究负载质心位置变化对隔冲性能的影响规律。
1 并联八杆隔冲平台结构设计与自由度分析
1.1 并联八杆隔冲平台结构设计
并联八杆隔冲平台主要由动平台、基平台、八根隔冲杆、十六个上下转动铰链与被保护的精密设备(负载)组成,如图1所示。为了更好地抵御来源于横向与垂向的冲击激励,将八个隔冲杆分为四组,每两个隔冲杆为一组,上、下转动铰链使用转动副,且每两组在同一水平线上对称安装,每根隔冲杆与基平台水平方向呈60°。
因并联八杆隔冲平台结构的对称性,可将整体结构简化成平面四杆结构进行仿真分析,其平面简图如图2所示。
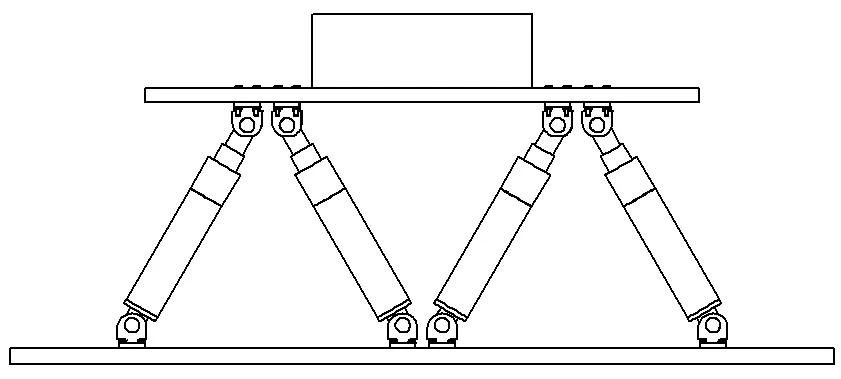
图2 并联八杆隔冲平台平面四杆模型
1.2 并联八杆隔冲平台自由度分析
运用螺旋理论求解由四条支链组成的平面四杆并联机构(4-RPR),单支螺旋系如图3所示。对一只单独的RPR支链进行分析,得出的螺旋与反螺旋自由度的表达式为:
.
(1)
.
(2)
由螺旋及反螺旋公式[11]可知,RPR支链具有三个自由度,分别为绕y轴转动和沿x、z轴移动;受到三个方向的约束,分别为y方向的移动约束和x、z方向的转动约束。
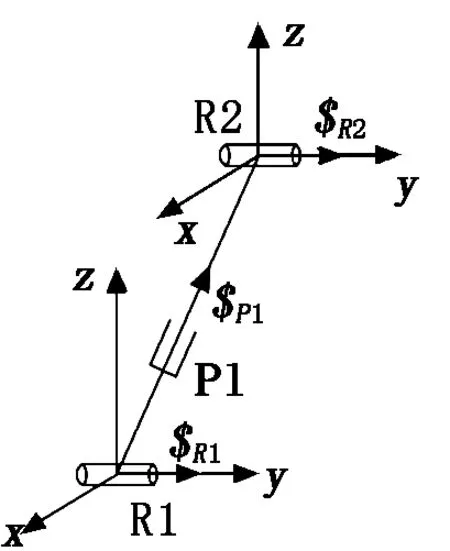
图3 单支螺旋系
为了验证螺旋公式的合理性,根据修正G-K[12]公式得并联机构自由度为:
.
(3)
其中:d为机构阶数;n为机构中构件的个数;q为运动副的数目;fi为第i个运动副的自由度个数;ξ和v分别为虚约束和局部自由度的数目。
由并联八杆隔冲平台结构可知,并联平台不具备公共约束,故d=3,n=10,q=12,fi=1,v=ξ=0,经过计算,并联机构自由度M=3。与螺旋理论所推一致,证明该平台结构设计合理。
2 仿真分析
2.1 模型参数与冲击载荷
根据上述内容,该并联八杆隔冲平台可简化为平面四杆结构,为三自由度系统。为了更好地探究负载、动平台与冲击激励之间的关系,运用仿真计算的手段对并联八杆隔冲平台进行横向冲击与垂向冲击分析,冲击方向如图4所示。

图4 冲击载荷方向
首先先将图2所示的平面四杆模型导入到ADAMS VIEW软件中,第一步统一单位为米(m)、千克(kg)、牛顿(N)、秒(s)、赫兹(Hz);第二步将四个隔冲杆的上下铰链处设置为转动副,隔冲杆内部结构中设置移动副,下平台、套筒、铰链基座设置为固定副;第三步在忽略隔冲杆质量的前提下,设置负载质量m为10 kg,动平台半径R为191.4 mm,因负载惯性导航设备可看作为圆柱体,圆柱体高度l设置为15 mm,其转动惯量计算公式为:
.
(4)
.
(5)
其中:Jz为负载绕z轴的转动惯量;Jx、Jy分别为负载绕x轴、y轴的转动惯量。
当负载质心位置偏离主轴时,其转动惯量计算公式为:
Jz=Jzc+me2
.
(6)
其中:Jzc为负载通过质心轴的转动惯量;e为偏心距。
最后设置单根隔冲杆刚度参数为8 000 N/m,阻尼参数为200 N·s/m,并施加冲击载荷,其冲击载荷为半正弦冲击类型,正波脉宽为11 ms,正波加速度幅值为100g。设置仿真时间为0.5 s,仿真步数为10 000,开始仿真计算。
2.2 质心位置对隔冲平台隔冲性能的影响
为了研究负载质心位置对隔冲平台抗冲击性能的影响,将质心位置分别在横向与垂向偏移40 mm和80 mm。通过仿真计算,得到隔冲平台分别在不同质心位置下的垂向冲击加速度、位移与横向冲击加速度、位移响应曲线,如图5~图8所示。
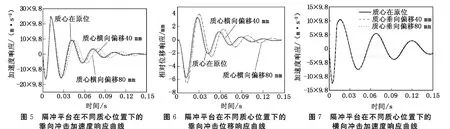
由图5~图8可知:隔冲平台受到垂向冲击激励时,质心位置横向偏移量增大,其加速度响应幅值减小,位移响应幅值增大;隔冲平台受到横向冲击激励时,质心位置垂向偏移量增大,其加速度响应幅值增大,位移响应幅值增大。对比垂向冲击与横向冲击环境下,负载质心位置发生垂向变化时比横向变化时的影响要大。因此,由于负载质心垂向变化影响大且在实际中垂向高度较高,故将负载质心初始位置向z轴正方向偏移100 mm、200 mm、300 mm、400 mm,通过仿真计算得到如图9、图10所示的响应曲线。
由图9、图10可知,随着质心位置的提高,加速度响应幅值约为线性变化,位移响应幅值增大,其位移增量变化如图11所示。
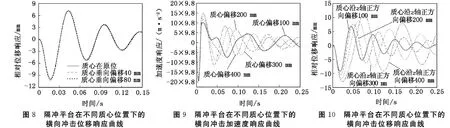
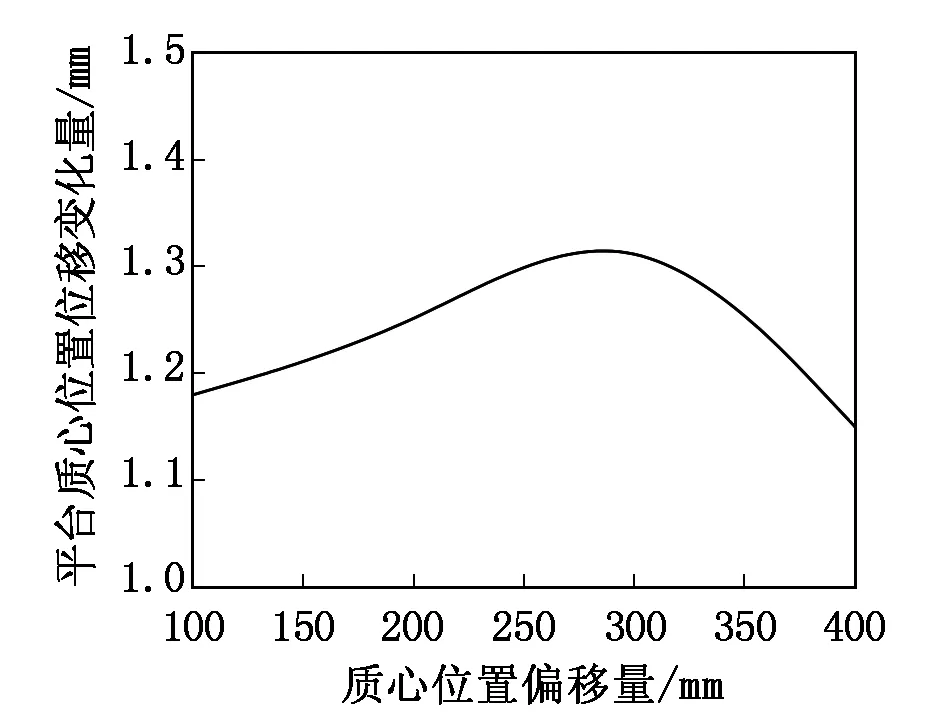
图11 隔冲平台在不同质心位置下的垂向冲击位移增量变化
由图11可知,当质心位置处在z轴正方向300 mm附近时,平台质心位置的位移变化量为1.37 mm,故可得出质心位置在z轴正方向300 mm处附近时属于抗冲击最敏感区间。
3 结论
设计了一种并联八杆隔冲平台,并考虑了其负载效应,进行了仿真计算,分析了负载在不同质心位置下对隔冲平台隔冲性能的影响规律,主要得到以下结论:
(1) 因平台与铰链之间的角度对隔冲性能会产生影响,故隔冲平台受垂向冲击下较横向冲击加速度响应幅值大15g左右;横向冲击下位移响应幅值是垂向冲击的2倍左右。
(2) 通过改变负载质心位置并进行仿真分析,得出质心位置垂向改变较横向改变对隔冲平台性能影响较大,其加速度响应信号约为线性变化,位移响应幅值随质心位置提高而增大,并得出负载质心位置处在z轴正方向300 mm附近时属于抗冲击最敏感区间,放置设备时应避免放在此区间位置。
