利用珠海CORS监测大气可降水量
2022-05-18陈文相莫永强
陈文相 莫永强 吴 伟
(1. 珠海市测绘院, 广东 珠海 519015;2. 广州市城市规划勘测设计研究院, 广东 广州 510060;3. 中国有色金属长沙勘察设计研究院有限公司, 湖南 长沙 410117)
0 引言
大气中水汽含量一般用大气可降水量(precipitable water vapor, PWV)来表示,PWV测取的准确性对预测区域内天气和气候十分重要。一般采用无线电探空[1]、微波辐射计[2]和卫星遥感[3]等方法测量,以上各方式的优缺点较为明显,无线探空仪测量周期较长且空间分辨率低;微波辐射计可以全天候无间断检测,但存在定标精度影响较大、工作量大等缺点;卫星遥感由于卫星轨道高度造时空分辨率较低,且易受云雨等外界因素影响。基于全球导航卫星系统(global navigation satellite system, GNSS)水汽反演是一种极具潜力、使用价值高的大气探测新方法,根据搭载平台的不同,可分为地基[4]和空基[5]两种模式。利用GNSS观测数据结合实测气象数据来实时估算高时空分辨率的大气可降水量PWV[6],具有精度高、时空分辨率高、实时连续、不受云雨影响、成本低等特点。珠海市已建立了珠海北斗连续运行卫星导航与位置服务系统(Zhuhai Beidou continuously operating reference stations, ZHBDCORS),能为用户提供高精度的导航定位服务[7],在信息化测绘建设的背景下,应充分发挥其应用价值,在需求分析的基础上开展实时大气可降水量监测系统的研究工作,有效利用现有的GNSS连续运行观测站资源,丰富数据产品,拓展其应用领域。
1 监测系统设计
1.1 PPP反演PWV原理
当GNSS卫星信号穿过电离层和对流层过程时,会产生信号延迟。大部分电离层延迟可用无电离层组合法进行消除,对流层延迟(zenith tropos-pheric delay,ZTD)进行单独估计,ZTD的90%是由大气中干燥气体引起的,称为天顶对流层干延迟(zenith hydrostatic delay,ZHD),其余10%由水汽引起,称为天顶对流层湿延迟(zenith wet delay,ZWD)。由于GNSS信号的湿延迟主要由大气中的水汽引起,可通过GNSS来反演PWV。目前基于GNSS的对流层延迟观测方法主要有相对定位(relative positioning,RP)和精密单点定位(precise point positioning,PPP)两种模式[8-9],基于非差观测模型的PPP技术无须额外引入基准站,可以估计测站的绝对对流层延迟,其中PPP完整的观测方程如下
(1)
(2)
式中,PIF是伪距观测值P1、P2组成的无电离层组合值;f1、f2分别表示载波相位观测值Φ1、Φ2上的频率;ρ是测站天线相位中心到卫星天线相位中心的几何距离;c为光速;dt代表卫星钟差;dT代表接收机钟差;dorb表示卫星轨道误差;dtrop代表对流层参数(由投影函数和天顶对流层参数构成);dmult/PIF、dmult/ΦIF分别代表伪距观测与相位观测的多路径影响;N代表无电离层组合的整周模糊度参数;ε代表观测值的随机误差。
将精密卫星星历和钟差引入,通过线性组合消除一阶电离层延迟,利用地表实测气压及萨斯塔莫伊宁模型消除对流层天顶流体静力学延迟误差,利用经验模型消除其他误差项,经过数据预处理,粗差探测及剔除、周跳探测,并将天顶湿延迟同其他位置参数利用卡尔曼滤波一起估计,经过一段时间收敛之后,即可获得稳定的对流层参数估值。得到最终的定位误差方程
(3)
(4)

总延迟ZTD的精度主要取决于精密单点定位估计的湿分量的精度。获得对流层湿分量后,利用转换因子∏便可将对流层湿延迟量转换为可降水量信息,如式(5)所示:
(5)

1.2 监测系统构建与设计
对流层水汽监测系统构建流程如图1所示,系统主要包括实时数据流(real-time data)和数据处理中心(data processing system)两部分,系统在设计上拓展了GNSS站点的接入范围,全球任意的GNSS基准站点都可通过Internet接入。系统运行时,分别接收当地CORS基准站或接入的GNSS基准站点的实时观测数据和IGS RTS实时轨道时钟改正产品以及辅助气象数据实时解算基准站上空的大气可降水量,完成水汽监测过程。将解算成果按照指定的格式在服务器、PC展示平台以及手机端进行展示和应用。

图1 水汽监测系统软件构建流程
其中,实时数据接收模块主要接收国际全球导航卫星系统服务的实时服务(international GNSS service real-time service,IGS RTS)如卫星轨道时钟改正数,广播星历接收解码,GNSS基准站数据,气象观测数据。通过IGS文件传输协议(file transfer protocol,FTP)服务器下载国际地理联合会(International Geographical Union,IGU)的预报星历产品、系统运行所需的各类表文件以及国家水模型(national water model,NWM)数据的下载,如欧洲中期天气预报中心(European Centre for Medium-Range Weather Forecasts,ECMWF)等;实时数据处理包含两个模块,一是实时PPP,用于估计出基准站坐标已经精确的ZTD产品;二是实时水汽转换,利用由气象参数或数学模型计算的ZHD将ZWD从ZTD中分离出来,再利用Tm模型计算水汽转换系数后将BZWD转化为BPWV;实时服务能提供5 min采样间隔的实时PPP坐标解,发布实时ZTD参数,展示站点的PWV参数。珠海市天顶方向的对流层延迟ZTD空间分布动态图与可降水量PWV空间分布动态如图2、图3所示。

图2 珠海市天顶方向的对流层延迟ZTD空间分布动态

图3 珠海市可降水量PWV空间分布动态
2 系统精度评估
2.1 外符合精度测试
随着GNSS的兼容与互操作的迅速发展,多模GNSS组合能够提供更多的、空间构型更加合理的可视卫星[10],为验证本系统对大气可降水量监测的精度,选择合适的单模或多模组合解算的方式,在ZHBDCORS的框架下,分别利用单GPS、单BDS、GNSS/BDS实时PPP计算得到的PWV与无线电探空仪得到的结果进行对比,选取了有无线电探空仪设施的GNSS测站,编号依次为1、2、3、4、5号站点。共选取年积日60~150 d的GNSS观测数据和无线电探空仪数据,基于GNSS的实时PPP反演PWV每30 s解算一次,无线电探空仪得到的Radio-PWV每12 h一次。得到PPP-PWV分别与无线探空仪测得的PWV的精度对比如表1所示。

表1 GPS、BDS、GNSS/BDS分别解算的PPP-PWV与Radio-PWV之间的精度对比 单位:mm
由表1可知,单GPS的PPP-PWV比单BDS的PPP-PWV的偏差要小,基于GNSS/BDS联合实时解算得到的PPP-PWV与无线探空仪得到的Radio-PWV相比差异小于2 mm,表明本文实时大气可降水量监测系统能满足实际应用需求。再从分别解算的RMS来看,GNSS/BDS联合解算PWV的RMS为1.5~1.8 mm,单GPS解算PWV的RMS为1.7~2.1 mm,单BDS解算PWV的RMS为2.4~2.8 mm。表明GNSS/BDS联合解算得到的PWV精度最高,单BDS解算的精度最低,可知北斗系统数据质量和稳定性比GPS要差。所以,本系统采用GNSS/BDS多模组合的PPP技术可对PWV进行反演。
2.2 内符合精度测试
ZHBDCORS的各站点分布如图4所示,图4为抽取的6个均匀分布的CORS站点,为测试大气可降水量监测的内符合精度,验证本系统能够实现对CORS内较小区域的水汽监测,选取了2020年7月某天监测系统对珠海地区水汽监测的动态变化分析。
从图4可以看出区域降雨的ZWD变化可以准确地反映到各个站点上,首先BTHU站在T06:00出现了ZWD监测图出现明显抬升,幅度大于20%且速率很大,此时除了DONA和QIAO两个站点有缓慢的增加趋势之外,FUSN和HEBO站并没有明显的增加现象,而DANG站出现了明显的下降现象。结合站点分布图可知,此时水汽存在由东向西输送的过程,由DANG向BTHU方向输送,但并没有到达FUSN站点位置。由分析可知,本文监测系统能够实现珠海地区CORS站点间小区域的水汽监测,准确区分各站之间的水汽变化。

图4 2020年8月某日降雨期间各站点ZWD变化情况
为了进一步验证对流层建模的精度,项目对2020年2月1日至2月15日和8月12日至8月16日15个测站进行建模,获取各站点上空对流层延迟改正序列,在此基础上,分别选择3个站作为基准站,选择3站范围内1个站作为内插站,将3个站内插结果与中间1个站实测结果进行比对,交叉选择的实验方案如表2所示。
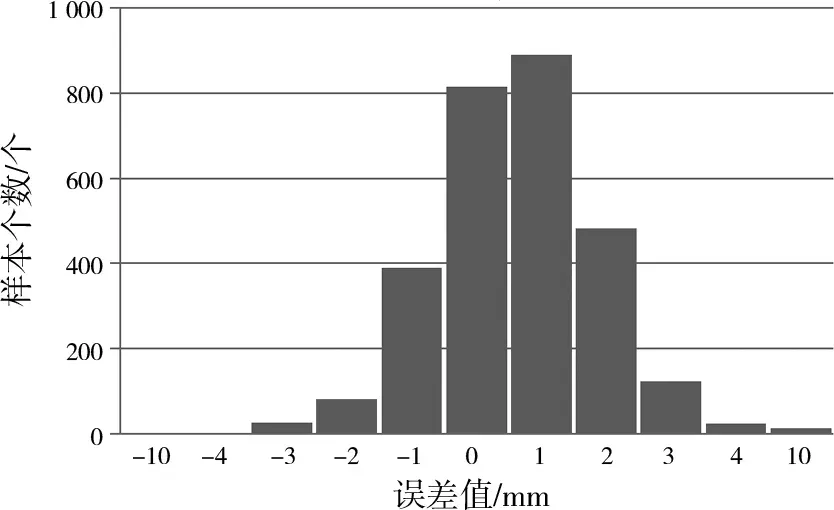
图5给出了统计结果,再通过表3交叉验证各方案的误差统计表,可以看出,不同组合方案PWV内插结果均优于2 mm,能够满足水汽监测与气象方面应用的精度要求。

表2 交叉验证测站选择方案

表3 交叉验证方案的误差统计表 单位:mm

(a)方案一
(b)方案二

(c)方案三

(d)方案四
3 结束语
本文依托珠海ZHBDCORS系统,开展实时大气可降水量监测系统的应用研究。采用PPP技术与IGS轨道、钟差产品实时或事后估计CORS站点上的大气可降水量,实现实时发布水汽监测数据。通过内符合精度的测试,通过精度对比选择GNSS/BDS多模联合解算PPP,同时验证了系统PPP-PWV数据满足精度要求;在外符合精度测试中,通过系统监测的数据对CORS网区域内的水汽变化动态分析,表明本系统能够实现较小区域内的水汽监测,具备高精度的监测能力,通过站点交叉验证PWV的内插精度,进一步表明本系统的内符合精度优于2 mm,能满足水汽监测与气象方面应用的精度要求,为珠海城市CORS系统的多功能应用奠定基础。
