机载激光雷达在密林山区测绘中的应用
2022-05-18王君杰王雁昕
王君杰 孙 健 王雁昕
(山东科技大学 测绘与空间信息学院, 山东 青岛 266590)
0 引言
现今世界,空间地理信息在内的大数据在各行各业起到至关重要的作用,已被视作国家发展的重要基础和战略资源,成为一种“国家核心资产”。而随着社会发展,数据获取平台和手段也变得越来越多样化,在此背景下,机载激光雷达测量技术应运而生。它是一种主动式对地观测系统,能够通过非接触的手段获取地表地物分布情况,经数据处理后便可得到精确的数字三维模型[1],同时激光雷达发出的光束可以穿透植被测得地面信息,为获得密林地区地面高程提供了可行技术手段,与其他测绘技术相比,该技术更适用于地形环境复杂区域。由于机载激光雷达三维扫描技术的独特优势,使其成为科研及相关工作者的热点研究方向:吴惠丰等[2]提出一种基于综合生成策略的方法,利用机载雷达地面点生成高保真、多尺度的数字高程模型(digital elevation model,DEM);蔡庆生[3]对经典不规则三角网滤波方法进行了改进,并通过应用实例,对算法性能进行了系统分析;高莎等[4]将原始点云与无人机影像融合,使地面点提取更加完整,DEM模型轮廓更加清晰。机载激光雷达技术的产生和发展也为制作数字表面模型、数字高程模型、数字正射影像和数字线划图等测绘成果提供了新的技术手段,已被广泛应用于道路测绘、地形测绘、矿山测量和建筑物三维重建等领域[5-7]。促进了许多交叉学科领域的发展。
本文选取植被茂密且坡度较陡的沟壑山区作为研究对象,探讨研究机载激光雷达测量技术应用到复杂的密林沟壑地形测绘以及数字高程模型生产的可行性和精度分析,并通过实例进行检验,验证了研究成果的可靠性,具有重要的理论和现实意义。
1 机载激光雷达技术工作原理
机载激光雷达系统是一种高度集成多种电子设备的新型测量系统,目前大多数机载雷达系统主要由以下4部分组成:激光扫描仪、惯性导航系统(inertial navigation system,INS)、差分全球定位系统(global positioning system,GPS)和高分辨率成像系统[8]。激光扫描仪主要由激光光源、发射及接收器、滤光镜、传感器和控制单元等多个部分组成,激光脉冲通过发射器发出,信号在传播达到一定距离后经过反射或散射被激光接收器接收,根据激光在空气中的传播速度便可得到两者之间的距离信息;INS系统的主要工作内容是计算出无人机在作业过程中的瞬时姿态角,包括航向角、俯仰角和横滚角等;差分GPS系统基于载波相位工作原理对INS系统出现的误差进行纠正,从而确保导航信息的准确性;成像系统则用于获取航测影像数据,得到采集地物的真实颜色信息,可用于后期点云分类和纹理贴图。各电子设备协调工作,精确同步,可以准确计算获取每一个激光角点的空间三维坐标,再经过后处理软件将点云与影像数据进行配准,就可以得到具有颜色信息的真彩点云数据。激光点云的生成与后期处理具体流程如图1所示。
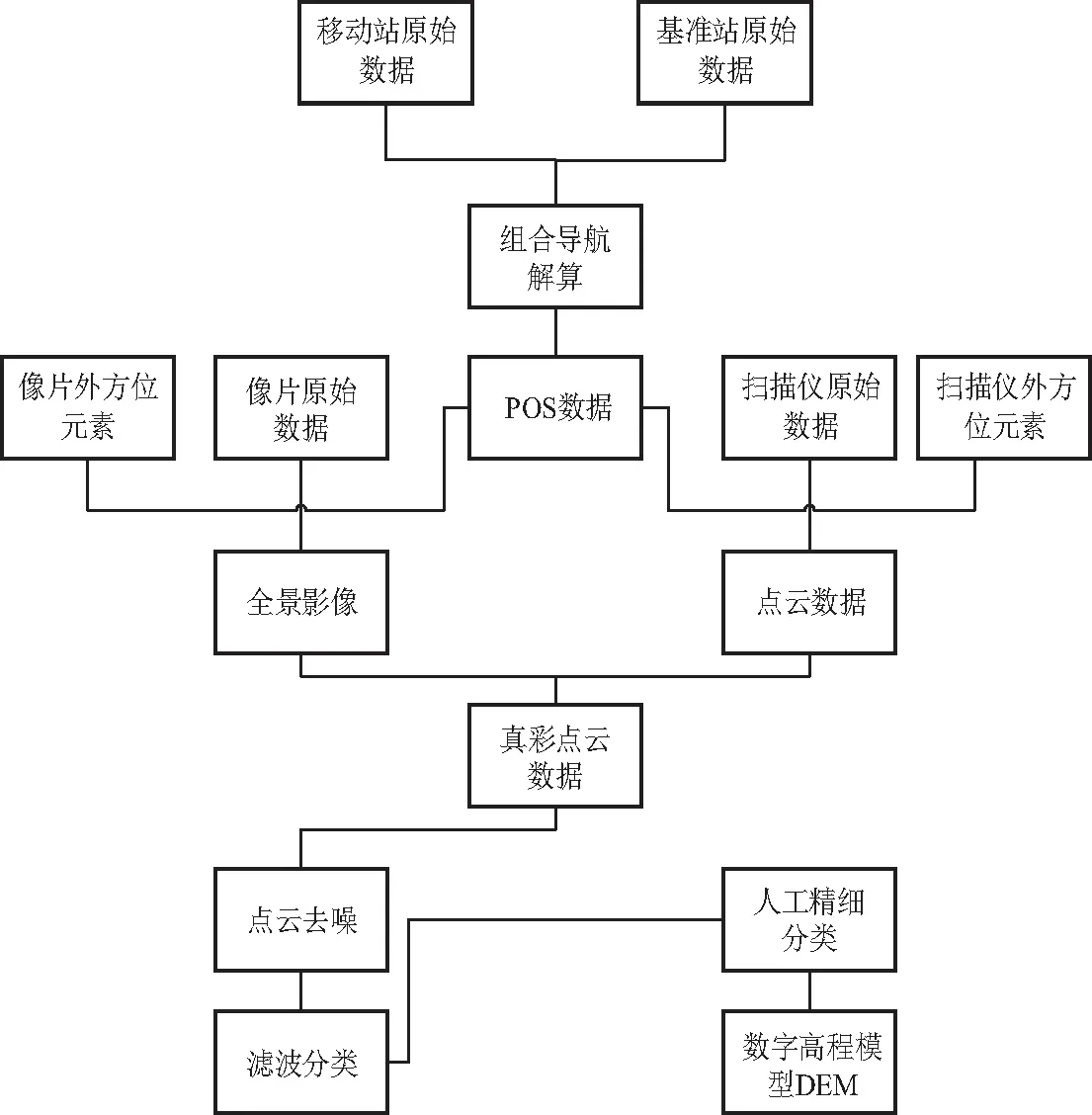
图1 点云数据获取与处理流程示意图
2 点云数据获取与预处理
2.1 研究区概况
研究区位于陕西省长武县彬长矿区中部,地处黄土高原南部丘陵沟壑区,区内沟谷纵横分布,切割较深,形成沟谷塬梁相隔的地貌,塬面以村落建筑分布区与农田耕种区为主,沟谷地区则多分布着梯田与陡峭崖壁形貌,区内黄土塬与坡谷相间分布,地势呈东西两侧高、中部低的特征,如图2所示。因位于矿区地下开采范围内,需要定期对地表数据进行监测,但其复杂地形对测绘人员作业造成了很大困难。在此背景下,选用Vsurs-L机载移动测量系统代替传统测量作业,经过实地踏勘并规划航线,飞行航高设置为95 m,旁向重叠率为35%,进行航飞激光点云数据获取工作。
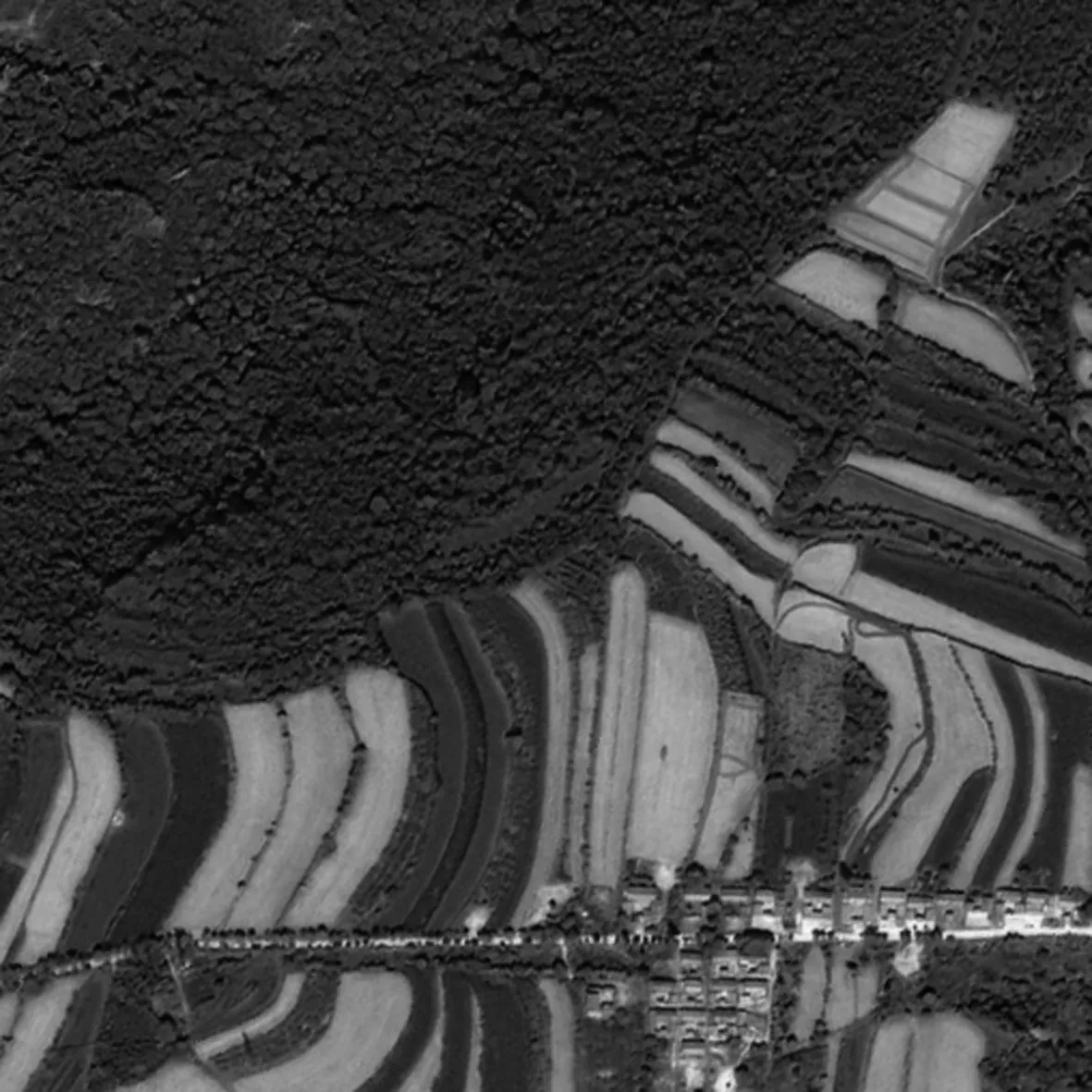
图2 研究区遥感影像图
2.2 点云数据质量检查
原始点云数据的质量直接决定了后期点云数据处理和模型构建的精度,因此在数据处理之前的质量检查就显得尤为重要,主要包括以下几个方面:
(1)检查航带之间点云的匹配误差,按航带赋色显示点云,对不同航带的重叠区域进行剖面视图检查,查看是否存在不同航带之间点云分层现象,如存在较大安置角误差,则需要对误差进行纠正:进行原始点云特征点采样统计,通过最小二乘平差计算改正值,对点云进行优化,从而消除或减弱航带匹配误差的影响。
(2)在保证数据质量的情况下,消除点云航带重叠造成的数据冗余,减小数据处理时的工作量,保证点云数据的一致性和准确性。
(3)航带间数据冗余剔除后,需要对点云密度进行检查:经过随机抽样检测,实验采集的原始点云平均密度为27 pt/m2,点云密度符合1∶500比例尺DEM标准所要求的16 pt/m2。
2.3 点云噪声滤除
由于目标的物理特性、空气环境中细微物质与仪器误差等因素的影响,机载激光雷达系统采集到的原始点云中不可避免地存在少量的噪声点,这些噪声点一类是扫描仪发射的激光光束,没有接收到目标的返回信息,由此导致的粗差点叫遗失点;另一类是系统误差和飞鸟飞虫导致的极低点和空中噪点统称为外露点,虽然这些干扰点在整个点云数据集合中占比较少,但其存在对数据质量和进一步数据处理带来很大的影响,因此,为得到更高精度的处理结果,就要先对点云数据进行预处理,将那些粗差点从整体数据中排除。本文实验中原始点云大部分噪声点通过Terra Scan软件分类空中噪点和低于地面点两个算法结合进行了有效滤除。
3 点云精确分类及DEM构建分析
3.1 滤波算法对比分析
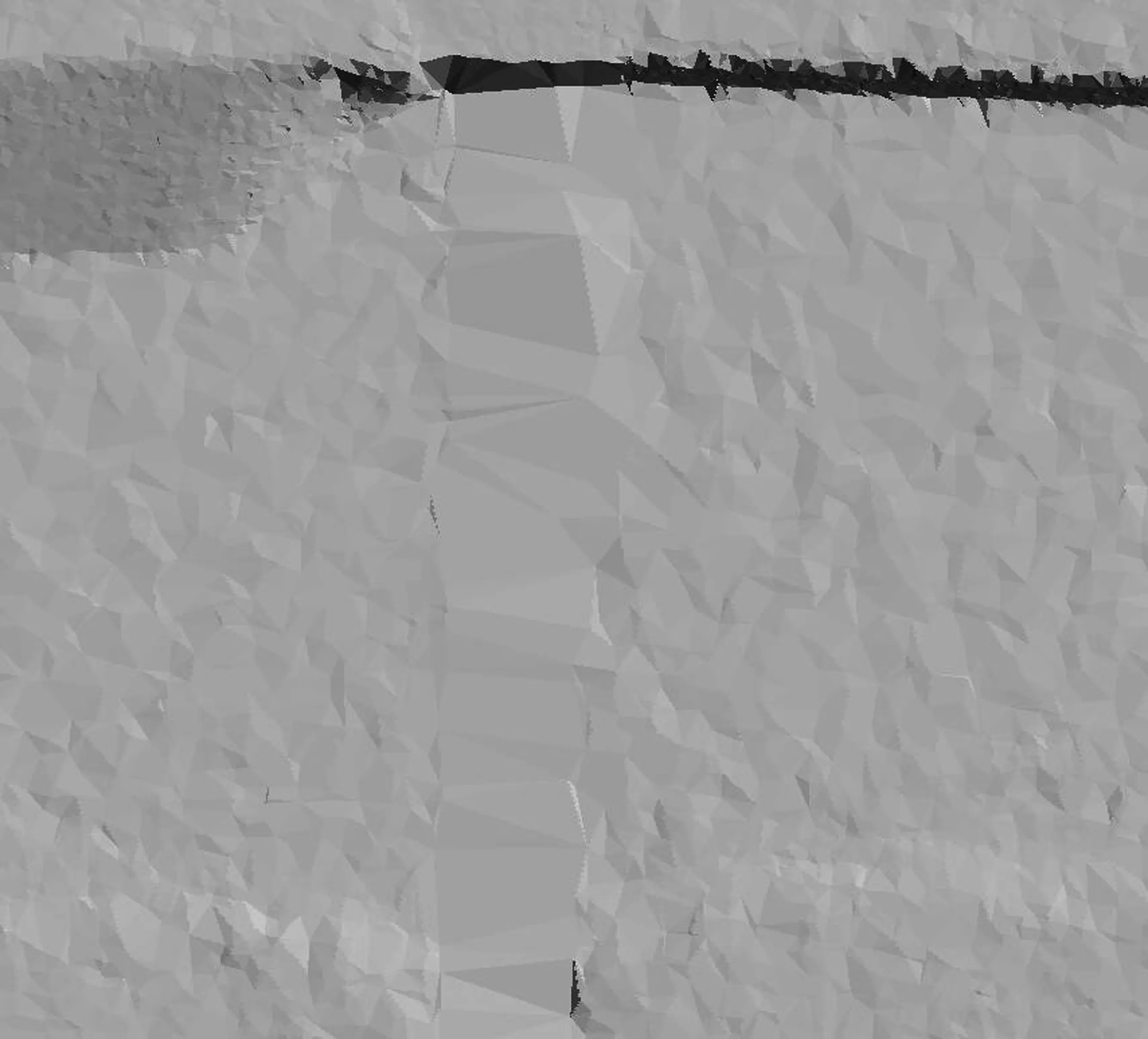
为了探究适用于密林山区沟壑地形的点云滤波算法,提高地面点云自动分类的精度,分别采用基于形态学的滤波算法、基于移动曲面的滤波算法、基于坡度阈值滤波算法和基于渐进三角网迭代加密的滤波算法4种地面点提取算法[9-11]对研究区进行滤波实验。每种滤波算法参数阈值的设定通过调试尽量达到点云滤波的最佳效果,得到每种算法最优的地面点提取结果后,为了便于观察,对地面点进行构网建模,各算法模型构建结果如图3所示。

(a)形态学滤波算法分类效果

(b)移动曲面滤波算法分类效果

(c)坡度阈值滤波算法分类效果

(d)渐进三角网迭代加密滤波算法分类效果
通过滤波后模型构建结果以及截取剖面的方法观察可知,4种算法在地势较平坦的区域分类效果均表现良好,大多数非地面点被有效剔除,地形特征也得到了很好的保留。基于移动曲面的滤波算法和基于坡度阈值滤波算法得到的地面模型在沟谷区域中存在一定的凸起点,且基于坡度阈值的滤波结果中凸起点相对更多,这些凸起通过拉剖面的方法可以辨识出是算法中没有识别出的少量低矮植被点,说明算法在坡度较大、植被覆盖较多的地方分类效果降低,存在错分现象;基于形态学的滤波算法在地势较陡的部分对地面点的提取效果不佳,存在漏分现象,缺少了足够的地面点进行构网,造成模型中沟谷地形特征表达出现不连续;基于渐进三角网迭代加密的滤波算法在沟壑区域对低矮植被点进行了有效滤除,且保留了原始地形特征,没有出现不连续现象。通过对比分析发现,4种算法对坡度较大及复杂地形的植被分布密集区域,在阈值设置合适的前提下,基于渐进三角网迭代加密的滤波算法具有更好的适应性。
为了定性分析几种滤波算法的分类效果,采用激光点的误分率评价点云滤波的精度,包括Ⅰ类误差(TI)、Ⅱ类误差(TII)和总误差(TE)[12]。计算公式如式(1)~式(3)所示
式中,a表示分类正确的地面点数;b表示错分为非地面点的地面点数;c表示将错分为地面点的非地面点数;d表示分类正确的非地面点数,e=a+b+c+d。由于缺少研究区的基准数据,本文借助区域内航摄影像和Terra Scan软件对点云进行人工精细分类,具体流程见3.2节,将分类结果作为基准,与其他算法滤波效果进行对比得到精度评定结果,如表1所示。
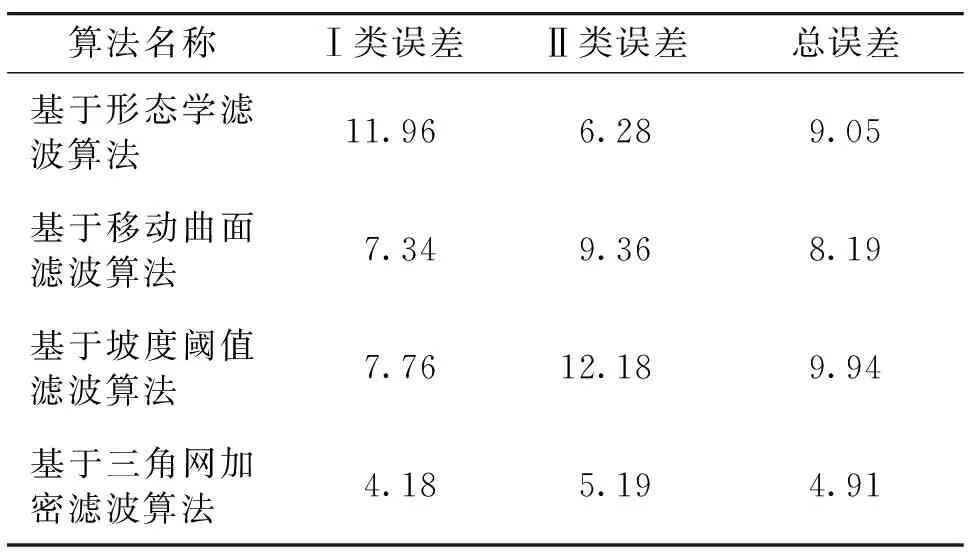
表1 滤波效果精度评定表 单位:%
由表1可知,4种算法对大部分植被等非地面点都进行了有效滤除,但在坡度变陡的沟壑地形下,滤波效果不一。从结果上看,基于形态学的滤波算法Ⅰ类误差较大,容易错分地面点,产生的地形过度腐蚀,造成数据损失;基于坡度阈值滤波算法自适应较差,误差整体偏大,沟壑区域分类效果不佳;基于移动曲面滤波算法Ⅱ类误差偏大;基于渐进三角网加密滤波算法的3类误差都小于其他算法,分类精度最高。
3.2 地面点人工精细分类
原始点云通过去噪以及滤波算法处理后,点云分类的结果中还会存在一定的错分点,因此需要通过人机交互的手段,对错分点进行人工分类,效果如图4~图6所示,主要包括的内容有:
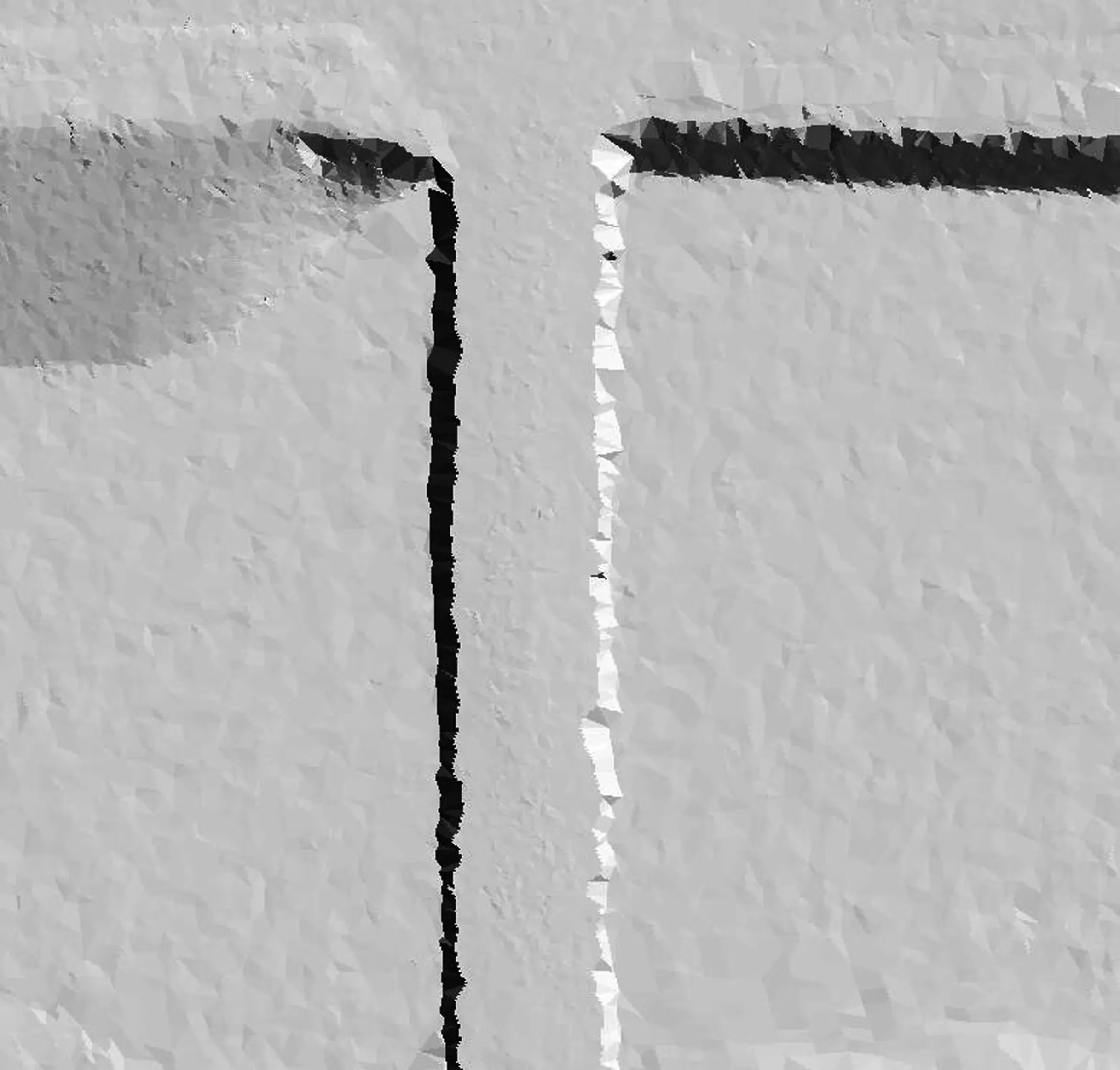
(a)桥梁原始点云 (b)桥梁手动归类后点云

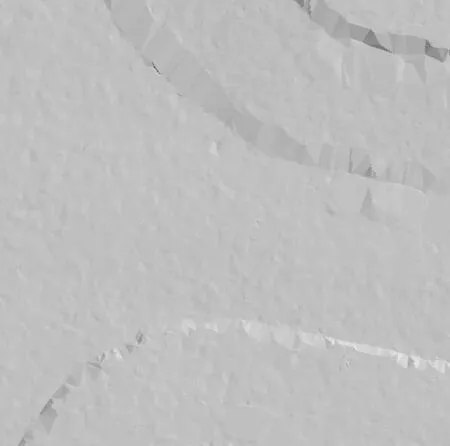
(a)存在噪点的路面点云 (b)剔除噪点后的路面点云


(a)存在低植被点的梯田点云 (b)剔除低植被点的梯田点云
(1)在陡坎、陡崖等地形坡度较大的地方,为了后续模型更好地表达地形特征,对算法没有识别出的地面点要加以补回,没有过滤掉的低矮植被点需要进行滤除;
(2)在有湖面或其他水面区域内由于激光雷达的特性使得点云存在偏差,通常采用的方法是对水面点进行置平操作,将水面内高程进行统一;
(3)架空的桥梁、立交桥等归类为人工地物,正常保留地面或水面上的点云数据,其余数据归类为非地面点;
(4)对没有滤除掉的空中噪声点和地面低点进行剔除,归类到噪声点图层。进行人工分类操作时,不能修改点云的三维坐标及回波等信息,不能直接删除点云,对需要滤除的点云可以通过截取剖面处理的方式将其归类到其他图层。
3.3 DEM构建与精度评定
点云经过人工编辑后,检验地形是否完整平滑,满足要求便可进行DEM输出。目前存在的DEM构建模型主要有:规则格网模型、不规则三角网模型和等高线模型等[13]。其原理是将分类后的地面离散激光点云通过一定的数据插值算法进行重采样,空洞部分通过局部内插获得点位高程,生成符合原地形的三维模型。其中,常用差值算法以相邻点高程为基准,根据地表形态在空间上的连续性和相关性,结合不同函数进行表面连续建模。不规则三角网模型相比规则格网模型减少了数据冗余,适应性好,可以充分地表达复杂地形特征[14]。在ArcMap软件中对原始地面点云创建LAS数据集,使用TIN工具构建不规则三角网模型,最后利用创建好的不规则三角网模型转换生成Grid格式的DEM。为了分析离散点云的构网精度,需要对DEM的精度进行评定,通过外业采集得到测区内共150个检测点,以此作为基准,检查模型成果中的高程精度,精度评定结果如表2所示。
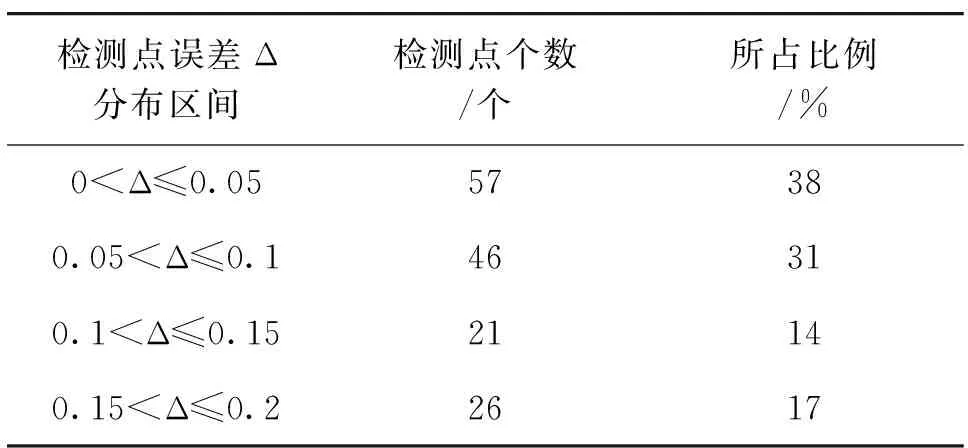
表2 DEM精度评定表
通过检测点精度分析,接近70%的点位误差在0.1 m之内,总体误差均值为0.07 m,高程模型中误差为0.09 m,高程中误差精度满足《CH/T 8024—2011机载激光雷达数据获取技术规范》[15]规定的1∶500地形图高程精度要求,地形特征表现效果较好,相比其他传统DEM生产方式更加便捷、可靠。
4 结束语
通过机载雷达设备获取的点云数据,具有高精度的三维空间数据信息,为制作高精度DEM提供了一种新的技术手段。本文系统介绍了机载激光点云数据处理及DEM模型建立评定的技术路线。针对研究区坡度较陡且存在大范围林地的地形条件,通过实验对比分析了几种常用的滤波算法,结果表明,基于渐进三角网加密滤波算法的误差值要小于其他几种算法,能够较好地滤除沟谷区低矮植被点并保留原始地形,分类效果良好,然后经过人机交互重分类,内插构建高精度DEM,高程中误差为0.09 m,精度满足1∶500比例尺DEM成图要求,对比传统测绘方式在生产效率、人员投入、结果精度等方面具有极大的优势和极高的可行性。虽然激光雷达系统硬件设备生产较为成熟,但现有的数据滤波、数据内插算法各有优缺点,任何一种算法都难以做到适应各种地形分类需求,因此,探索机载雷达技术点云数据处理与应用,开发更加智能、精确、适应性高的点云滤波算法值得我们去关注和研究,对提高DEM生成质量及未来机载雷达技术发展应用都具有重要意义。
