多机互联电缆敷设机协同控制方法及装置研究
2022-05-14胡伟潘彩虹何青关山辛业春
胡伟,潘彩虹,何青,关山,辛业春
(1.杭州凯达电力建设有限公司,杭州 311100; 2.东北电力大学a.机械工程学院; b.电气工程学院,吉林 吉林 132012)
0 引言
随着电缆直径和敷设距离的不断增加,我国大多采用卷扬机带动钢丝绳牵引的方式敷设电缆[1-2]。但是,当电缆弯曲直径过大时,经常会出现电缆绞拧和铠装压扁等问题,导致电缆带伤运行甚至报废,无法满足正常电缆敷设工作[3]。相较于牵引敷设,串联助力敷设采用多台电缆敷设机代替单个牵引机,改变了牵引力为主的传统敷设方式,减少了敷设过程中电缆局部受力过大和过度磨损等问题,极大程度上保障了敷设质量,在大直径电缆长距离敷设中受到人们的广泛关注[4-5]。但是串联助力敷设也存在一些问题,例如:由于复杂敷设路径中各台敷设机的推送长度不同,预设夹紧力可能不足以产生所需的推送力而造成各台敷设机的推送速度不一致,这可能增加反向拉力,起反作用,也可能挤压电缆,增大与管壁的磨损,降低电缆的安装质量。此外,当夹紧力不足时,工程实践中还可能出现电缆打滑现象,影响电缆敷设工作的正常进行。因此,如何根据电缆敷设机实时工作状态实现多机协同控制是电力系统工作中存在的重点和难点[6]。
基于多机互联敷设模式,提出了一种多机互联电缆敷设机协同控制方法,研发了协调控制装置,降低了人力投入,提升了智能化水平,极大地提高了敷设效率和安装质量。
1 敷设系统及控制功能分析
1.1 多机互联电缆敷设系统
多机互联电缆敷设系统如图1所示。系统分为现场层和管控层。现场层为布置于敷设路径上的电缆敷设机集合,多台电缆敷设机以助力的方式依次加入电缆敷设过程,实时监测夹紧力、敷设速度和敷设长度等信息,并通过通信模块与管控层进行信息交互,实现对电缆敷设工作的远程监控。管控层以协调控制装置为核心,采用统一控制和个别控制相结合的控制理念,通过监测信息分析、控制指令生成、控制指令下达等步骤保障多机协同,完成电缆敷设工作。
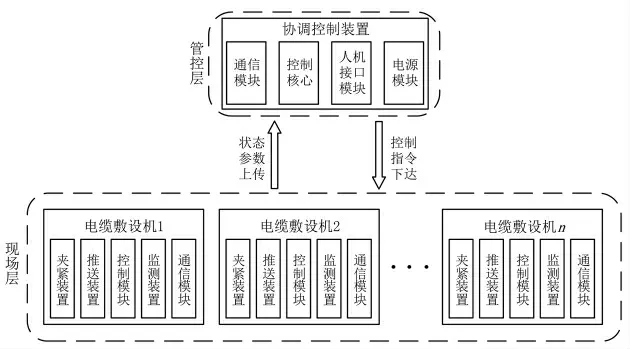
图1 系统总体结构框图
1.2 多机互联电缆敷设监测原理
多机互联电缆敷设系统的监控对象包括电缆推送速度、夹紧力、电缆头压力和敷设管况。电缆敷设机监测装置布置如图2所示。光电编码器摩擦轮和导入轮组相配合,当电缆到达或经过敷设机工作位置会驱动导入轮组和光电编码器摩擦轮同步转动,实现对推送电缆速度的监测。轮辐式压力传感器布置于夹紧装置和机架交汇处,实现对电缆夹紧力的测量。敷设电缆监测装置如图3所示。敷设电缆监测装置安装于敷设电缆头部,螺杆式压力传感器实现对电缆头压力的监测,摄像头并辅以LED灯板实时监测敷设管况。
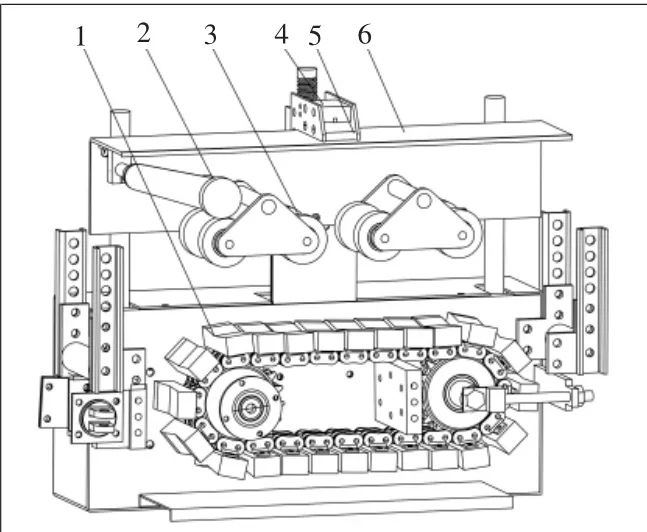
图2 电缆敷设机监测装置布置
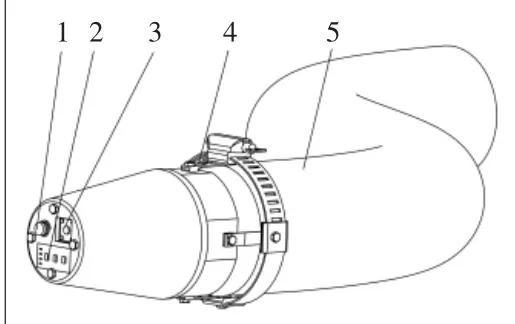
图3 敷设电缆监测装置
1.3 协调控制功能
通过分析敷设系统的总体结构和监测原理,归纳协调控制装置的具体功能。协调控制装置主要功能如下:1)远程集中控制所有敷设机以统一的工作参数(敷设工作的启停和敷设速度等)进行敷设电缆工作,并依据敷设机运行状态进行实时调整以保证多机协同工作;2)根据单台敷设机工作状态决定何时启动敷设机,以及判定是否存在因预设夹紧力不足而造成推送过程中的电缆打滑现象,并对上述内容进行智能化控制以保证正常的敷设工作。
2 协调控制策略
协同控制策略包括多机控制和单机控制。多机控制负责管理电缆敷设的全局工作参数,单机控制负责调节单台电缆敷设机的运行状态。多机控制和单机控制相结合,实现多机协同控制,保障电缆敷设工作正常进行。
2.1 多机控制
多机控制方法流程如图4所示,首先设定全局工作参数(如电缆型号、直径和敷设速度等),并将参数下达至各电缆敷设机,开始敷设电缆;然后协调控制装置对全局电缆敷设工作进行监控,并实时判断敷设系统是否协调工作,如果是,则保持正常工作,如果否,则依据控制指令和运行状态对各台电缆敷设机的工作参数进行调节(即单机控制),保证多机协同工作。同时,协调控制装置还根据敷设管况和电缆头压力判断敷设管道是否堵塞,当管道堵塞时紧急停止工作,等工作人员疏通后重新敷设电缆。此外,如果工作进度不符合要求,还可调节敷设速度等全局参数,保证敷设工作按期完成。
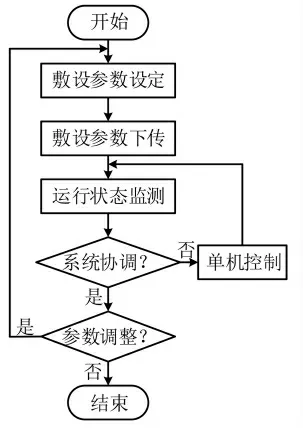
图4 多机控制方法流程
2.2 单机控制
单机控制主要依据监测数据判定各台敷设机的实时状态,并据此调整敷设机的相应参数,保证多机协同工作。首先单台敷设机接受工作人员设定的全局工作参数,启动监测装置对敷设机进行监测,准备开始电缆敷设工作。当监测到光电编码器计数时,可判定电缆已到达该敷设机工作位置,敷设机根据全局工作参数按照预设的夹紧力对电缆进行夹紧,开始电缆推送工作。在电缆推送过程中,当光电编码器所监测的速度和设定的敷设速度不一致时,可判定出现电缆打滑现象,电缆敷设机以步进的方式逐步增加夹紧力,保证电缆敷设工作正常进行。单机控制方法流程如图5所示。
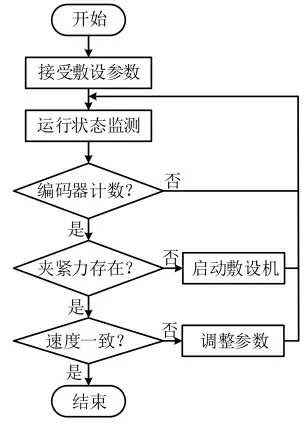
图5 单机控制方法流程
3 协调控制装置
协调控制装置结构如图6所示。该装置包括控制核心、人机接口模块、通信模块和电源模块。控制核心负责协调其余各模块,实现对电缆敷设工作的远程集中控制,并根据上述内置协调控制策略对多个工作参数进行实时调节,保证多机协同控制。通信模块负责接受来自敷设机的运行信息,并向敷设机下达控制核心制定的调整指令,实现协调控制装置与敷设机的信息交互。人机接口模块提供电缆型号、直径、敷设速度等工作参数的设定界面,并具有敷设机运行状态的实时显示功能,为电缆敷设人员提供便利,提升了人机交互性能。电源模块具备超宽电压输入功能,保证在复杂工况中为各模块提供稳定电源输入。
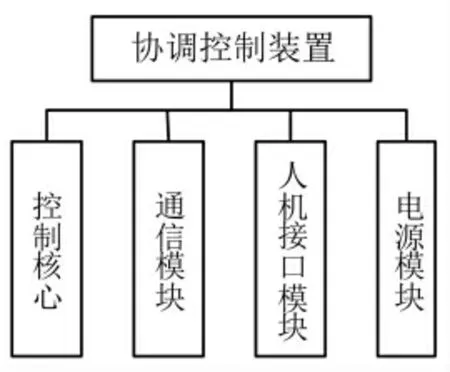
图6 协调控制装置结构
控制核心主要包括以STM32F103C8T6 芯片为主控芯片的核心电路。STM32F103C8T6主控芯片以32位ARM Cortex-M为内核,采用LQFP48封装,频率为72 MHz,程序存储器容量为64 kB,具有3个USART接口,分别用于与无线通信模块和人机接口模块的通信。STM32F103C8T6芯片外围电路如图7所示。
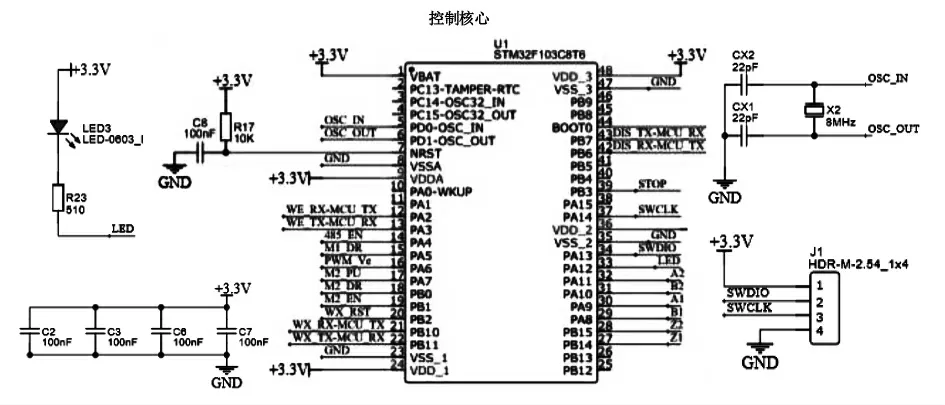
图7 STM32F103C8T6芯片外围电路
无线通信模块采用E22-400T22D无线模块,其采用SX1268射频芯片,具有抗干扰能力强和传输距离远(最远距离为5 km)等优点,保障通信的稳定性。此外,该模块还具有体积小、传输速度快(最高速度:62.5 kBps)、功耗低等优点,增强了系统的实时性。无线通信模块电路如图8所示。
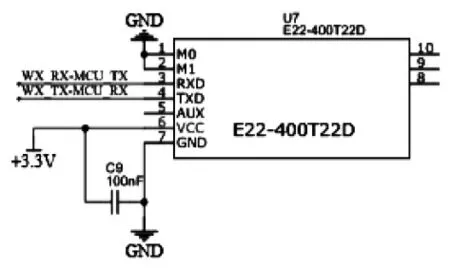
图8 无线通信模块电路
人机接口模块主要包括串口屏和收发器两部分。串口屏采用HYW070型号显示屏,分辨率为1026 ×600,并且还具有多种组态控件(数据录入、曲线显示和增量调节等)。收发 器 选 用SP3232EEY -L/TR模块,增强传输信号的强度,实现恶劣环境下的可靠通信。人机接口模块电路如图9 所示。人机接口界面如图10所示。
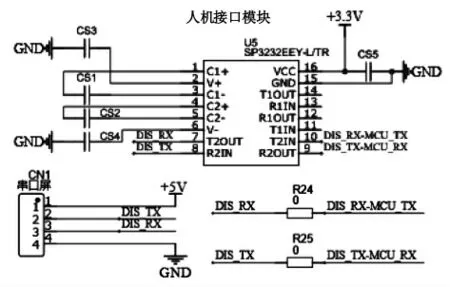
图9 人机接口模块电路

图10 人机接口界面
电源模块选用URB4805 YMD-10WR3模块电源,具有超宽电压输入范围,隔离电压高达DC 1500 V ,具有输入过压、短路和过流保护功能,目前广泛应用于电力、工控和通信等领域。电源模块电路如图11所示。
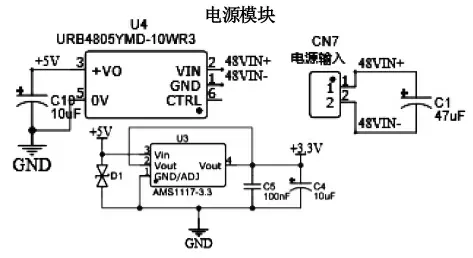
图11 电源模块电路
协调控制装置工作流程如图12所示,首先利用无线通信模块建立协调控制装置与敷设机的通信,检查敷设机上线台数,确认无误后,准备开始电缆敷设工作;然后控制核心根据内置的控制策略(即单机控制和多机控制)协调其余各模块对敷设机进行调整,保证敷设机协同工作。其中,多机控制所需设定参数(如电缆型号、直径、敷设速度等)通过人机接口模块进行设置,方便工作人员操作。
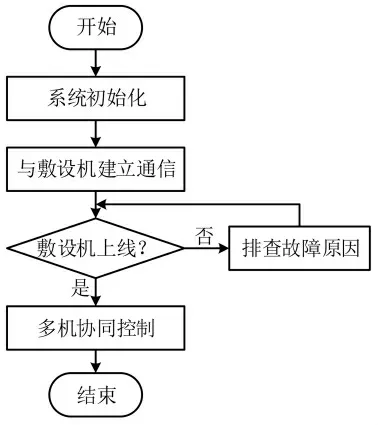
图12 协调控制装置工作流程
4 结语
1)基于多机互联敷设模式,提出了一种多机互联电缆敷设机协同控制方法,多机控制管理电缆敷设的工作进度和全局参数,而单机控制则根据全局参数和运行状态对敷设机参数进行实时微调,单机控制和多机控制相结合,保障多机协同工作,降低了人力投入,极大地提升了人性化程度。
2)开发了协调控制装置,利用无线通信模块与敷设机建立通信,实现对多台敷设机的远程集中管理,并根据内置协调控制策略对多工作参数进行实时调节,提高了电缆敷设的自动化和智能化水平,保障了敷设效率和安装质量。
