机械式直流断路器性能分析及谐振换流方法
2022-05-13李鹏宇温伟杰刘海金
李 斌 李鹏宇 温伟杰 刘海金
(1. 智能电网教育部重点实验室(天津大学) 天津 300072 2. 国网山西省电力公司电力科学研究院 太原 030000)
0 引言
基于模块化多电平换流器(Modular Multilevel Converter, MMC)的柔性直流输电技术具有不存在换相失败、有功和无功解耦控制、谐波畸变小、拓展性好等技术优势,是解决风电、光伏大规模并网和远距离输送问题的有效手段[1-3]。然而,直流故障电流上升速度快、幅值高且无过零点,而电力电子设备耐浪涌能力差,对直流断路器(DC Circuit Breaker, DCCB)的动作时间和开断能力都提出了极高的要求[4]。
DCCB主要分为三类:固态式DCCB、混合式DCCB和机械式DCCB[5-8]。其中,机械式DCCB主要采用机械开关(Mechanical Switch, MS)、电容、金属氧化物避雷器(Metal Oxide Arrester,MOA)等元件,具有微损耗、低成本、小体积和便于维护的优势,具有广泛的应用前景[9-11]。
在双碳背景下,远海风电经柔性直流系统送出被认为是海上风电并网的主流技术路线[12-14],新场景也对机械式DCCB提出了一些新要求,尤其是远海风场换流器出口空间宝贵,也决定了机械式DCCB应向轻型化、紧凑化的方向发展[15]。但现有的换流方式存在预充电系统耐压高、预充电容的容量高、开断过程的预充能量损失率高、换流时间长、小电流熄弧不稳定的问题,成为机械式DCCB的发展瓶颈。
针对上述问题,本文给出机械式DCCB的通用换流模型和评价换流技术的性能指标,并对照所述指标总结现有机械式DCCB的换流技术缺陷,在此基础上提出一种基于半控器件的谐振型机械式DCCB(Resonant Mechanical-DCCB, RM-DCCB)。随后,研究了用于描述RM-DCCB换流特性的精确数学模型;给出了RM-DCCB的换流支路电气参数设计方法;通过仿真验证了参数设计的正确性以及RM-DCCB的开断可行性。
1 机械式DCCB换流技术的性能对比
1.1 通用换流模型及性能指标
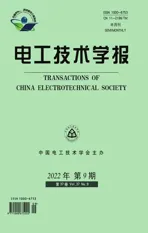
为便于归纳对比,首先将机械式DCCB简化为如图1a所示拓扑,包括三条并联支路:通流支路、换流支路和吸能支路。其中,通流支路的主要部件是MS;换流支路的主要部件是高压电容CH和电感LH;吸能支路由MOA构成。在开断过程中,机械式DCCB存在三次换流过程:通流支路→换流支路→吸能支路→换流支路。由于通流支路阻抗低于换流支路,第①次换流必须依靠弧柱能量或外界激励源强迫完成;第②和第③次换流是由高压电容的充电效应及避雷器特性引发的自然换流过程。需要说明,第①次换流是直流开断的关键难题,也是不同类型机械式DCCB的主要区别所在,因此本文所讨论的换流技术特指第①次换流。
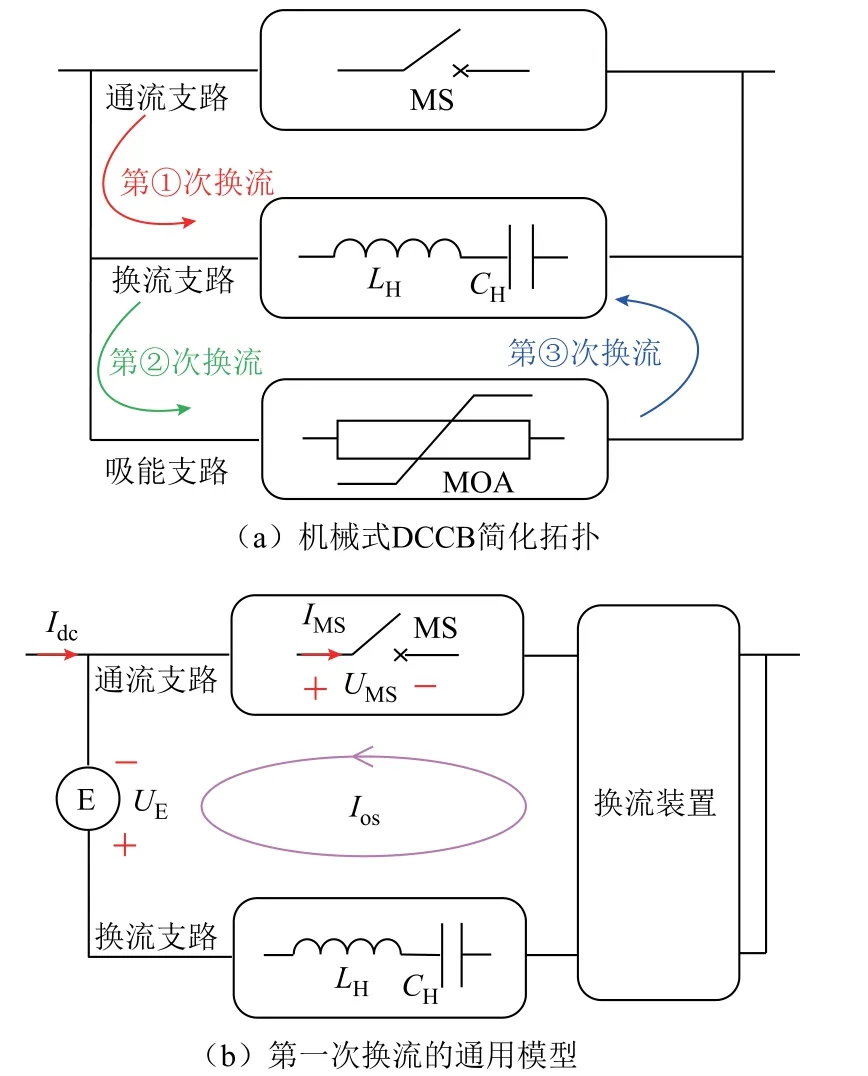
图1 机械式DCCB简化拓扑及换流模型 Fig.1 Simplified topology and commutation model of mechanical DCCB
进一步地,将机械式DCCB的通用换流模型等效为在通流支路与换流支路形成的环路中施加电压激励UE,并因此产生振荡电流Ios,如图1b所示。当Ios峰值大于待开断电流Idc时,MS中会出现电流过零点。事实上,电压激励UE可通过MS、高压电容CH或换流装置施加。
若不计回路中电阻,振荡过程相当于UE在电容上的能量与Ios在电感中能量之间的反复转换。Ios的峰值Ios_max和周期Tos分别近似服从式(1)和式(2)。
式中,C为换流环路的等效电容;L为换流环路的等效电感。
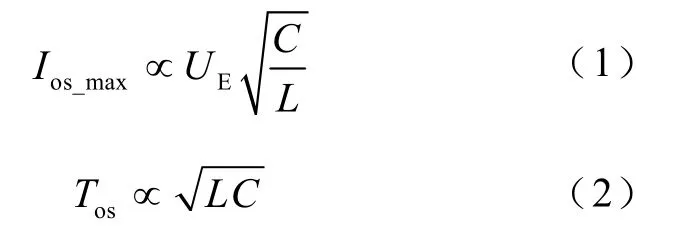
图2为机械式DCCB在大电流和小电流开断工况下的典型开断波形。其中,Idc_b、IMS_b、UMS_b分别为大电流开断工况下,待开断直流电流、MS电流和MS电压;Idc_s、IMS_s、UMS_s分别为小电流开断工况下,待开断直流电流、MS电流和MS电压。如图2所示,t1时刻DCCB收到分闸命令;t2时刻触发换流;t3(t3_b或t3_s)为换流结束时刻,此时MS的电流过零熄弧,电路发生切换,在盈余的换流能量作用下,电容C与MS断口杂散电容、回路杂散电感产生高频振荡。由图2及电容充放电特性可知,熄弧之后,UMS先反向振荡(幅值约为电容C上电压UC的二倍),直至UC与UMS几乎相等,再按照Idc/C的速率正向增大。为了区分上述两个阶段,定义UMS在反向振荡过程为反向瞬态剩余电压,在后续正向增大过程为正向暂态开断电压。需要说明,Idc越小,则MS弧前di/dt越大,熄弧瞬间UC越大,弧后du/dt也越大,对MS介质恢复能力要求越高。
图2 机械式DCCB的典型开断波形 Fig.2 Typical interruption waveforms of mechanical DCCB
根据以上分析及机械式DCCB的工作特性,本文提出的换流技术性能评价指标如下:
①换流时间Δtos:从换流触发到换流结束的时间差(Δtos=t3-t2),是决定DCCB开断速度的关键因素。
②充电系统的耐压要求UCp:预充电容Cp的充电系统在开断过程中承受的最高电压,决定了充电系统绝缘难度和造价。
③预充能量Wp:与Cp及其预充电压U0相关,决定了换流装置的成本和体积。
④预充能量损失率S:在一个完整开断过程中损失的能量与预充能量Wp之比,决定了机械式DCCB经200~500ms的线路去游离时间后,若合闸到故障线路,二次开断对充电系统功率或冗余能量的配置要求。
⑤机械开关熄弧压力Pae:由MS的弧前di/dt与弧后du/dt之积决定,Pae是评价电弧能否可靠熄灭的关键指标,Pae越大则灭弧难度越大[16]。
1.2 机械式DCCB的各类换流技术
根据换流过程是否需要预充电能,可将机械式DCCB分为无源型和有源型。其中,无源型包括SF6振荡型和负荷电流开关(Load Current Switch, LCS)辅助换流型;有源型包括高压电容直接预充电型、耦合负压型、电压源换流器(Voltage Source Converter, VSC)辅助换流型等。具体如下:
SF6振荡型机械式DCCB如图3a所示,它以SF6弧压作为激励UE,在LC回路中产生自激振荡电流[17-20]。受限于SF6的弧压水平及建立速度,该类DCCB的最大开断电流约为6kA,动作时间30~40ms,一般仅用作常规直流工程的转换开关[21]。需要说明,SF6的负阻性使Ios振荡上升,则Idc(IMS)总能在较接近Ios峰值的瞬间被成功换流,此时的Pae较小,有利于小电流的可靠开断[22-23]。
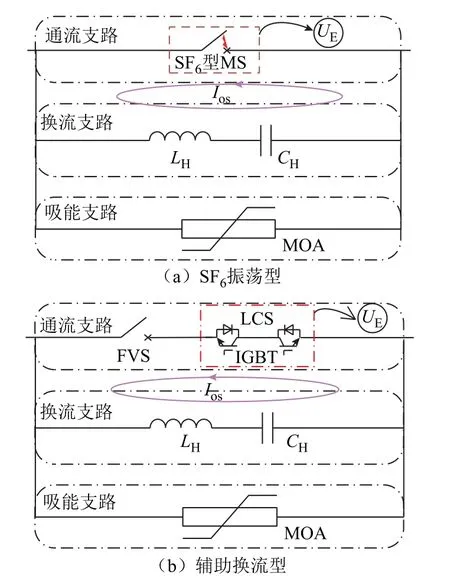
图3 无源换流型机械式DCCB Fig.3 Passive commutation mechanical DCCB
LCS辅助换流型机械式DCCB如图3b所示,LCS的关断电压即为UE,但LCS的通态损耗较高,需要可靠的散热系统[24-25]。此外,由于所整定的Ios首峰值较大,快速真空开关(Fast Vacuum Switch, FVS)开断小电流时熄弧压力Pae较大。
高压电容直接预充电型DCCB如图4a所示,利用开关S与充电电阻Rc从直流电网取电,充电可靠性较低[26-27]。该方案通过触发球隙控制预充能量释放。由于电压激励UE瞬间施加在换流回路,Ios首峰值较大,使小电流开断工况的熄弧压力较大。此外,为使DCCB每次开断后恢复初始状态,需要释放CH的开断电压,导致预充能量损失率S较高。
耦合负压型机械式DCCB拓扑如图4b所示,通过耦合变压器实现了充电系统与高压侧的隔离,其利用低压侧的晶闸管(Solicon Controlled Rectifier, SCR)触发电压激励UE[28-30]。然而,变压器的耦合效率有限,无法将低压侧的Wp完全利用[31];耦合电感L2使换流回路L增大,即增大了换流所需的能量。此外,该方案仍存在预充能量损失率高和熄弧压力大的问题。 DCCB进行改进。
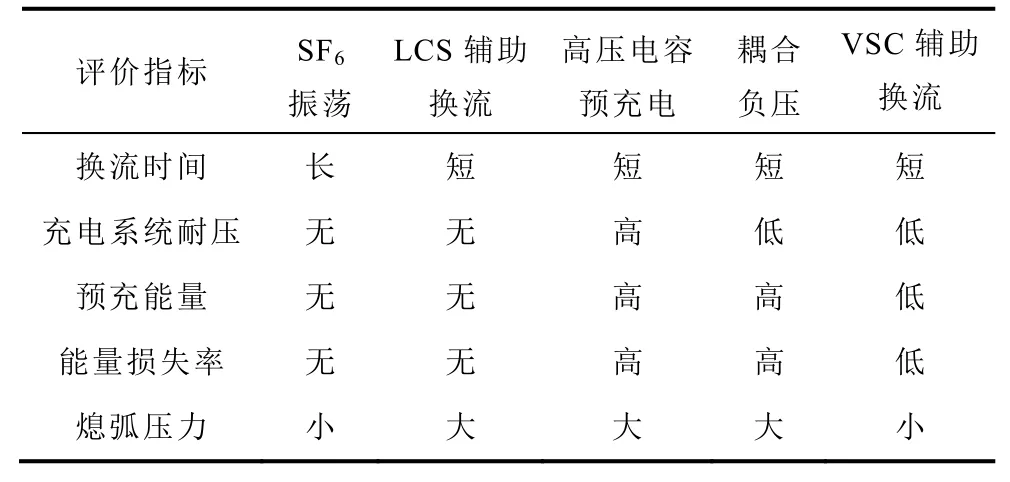
表1 换流技术对比 Tab.1 Comparison of commutation technology
2 基于半控器件的RM-DCCB工作原理
2.1 拓扑结构与工作原理
本文提出的基于半控器件的RM-DCCB拓扑如图5所示,它包括三条并联支路。其中,通流支路由FVS构成;换流支路由电感LH、高压电容CH和方波激励源②(低压预充电容Cp及四个快速晶闸管SCR)构成,为降低Cp及其充电系统耐压要求,Cp取值应远大于CH;吸能支路由MOA构成。
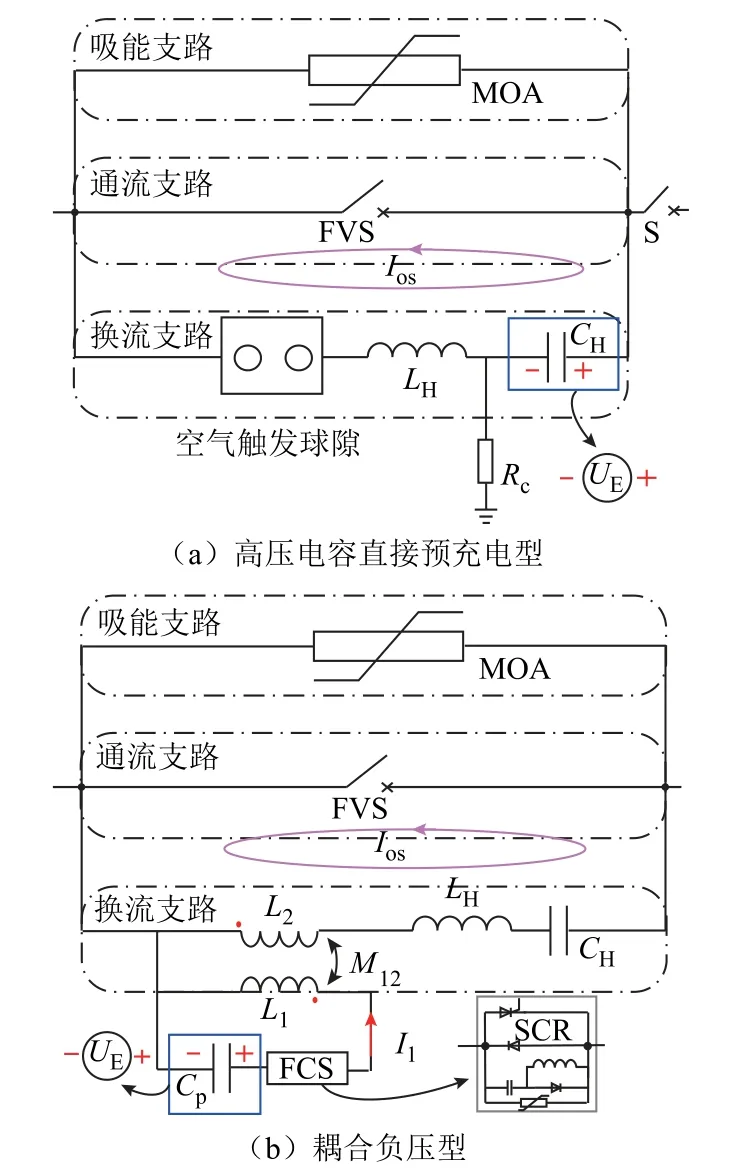
图4 传统有源换流型机械式DCCB Fig.4 Traditional active commutation mechanical DCCB
不同于传统有源型机械式DCCB,文献[32]利用IGBT的高频投切,控制Cp多次向换流支路施加激励,形成了类似于全桥MMC子模块的方波激励源(见后文图5方波激励源①),因此被称为VSC辅助换流型。该拓扑的Ios波形与SF6振荡型相同,减小了MS的熄弧压力。此外,它将较大的Cp置于桥型结构中,降低了预充电系统的耐压要求及每次开断的能量损失率,是一种颇具潜力的有源谐振型机械式DCCB。
基于1.1节的评价指标,将所述的五种机械式DCCB的换流技术对比结果示于表1中。
由表1可知,与传统机械式DCCB相比,VSC辅助换流型DCCB综合优势明显。然而,文献[32]所给出的Ios表达式由于未考虑预充电压跌落而不够精确,无法准确指导RM-DCCB的换流支路电气参数设计。此外,虽然IGBT的控制灵活,但其耐浪涌能力差且单管成本高,限制了其经济性优势。基于上述分析,本文将从换流技术着手,对机械式
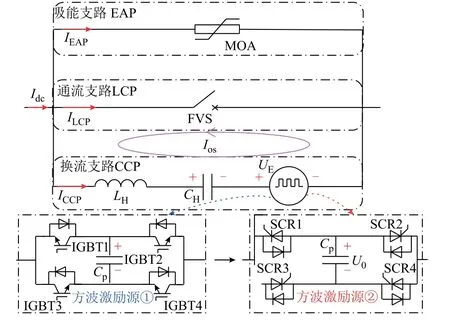
图5 RM-DCCB拓扑 Fig.5 Topology of RM-DCCB
在图5中,Idc为总的直流电流,ILCP为通流支路电流,ICCP为换流支路电流,IEAP为流经吸能支路的电流;UE为方波激励源②的对外电压,它的初值等于预充电压U0。
正常运行时,Idc流经通流支路的FVS。开断直流电流时,RM-DCCB的典型开断波形如图6所示。
(1)t1时刻,RM-DCCB收到分闸命令,FVS的动、静触头分离并燃弧。
(2)t2时刻,FVS达到安全开距,按照预先设置的时序触发方波激励源。当换流支路的固有频率与方波激励源的触发频率相同,可产生幅值递增的谐振电流Ios,也即t2~t3阶段内的换流支路电流ICCP。
图6 RM-DCCB的典型开断波形 Fig.6 Typical interruption waveforms of RM-DCCB
(3)t3时刻,ILCP在Ios的叠加作用下过零,则FVS中的电弧熄弧,Idc全部转移到换流支路,并对该支路中的电容充电。
(4)t4时刻,换流支路两端电压达到MOA参考电压,MOA从高阻态转变为低阻态,ICCP逐渐转移至吸能支路,Idc在MOA残压作用下开始衰减。
(5)t5时刻,Idc被衰减至零。
2.2 RM-DCCB的换流特性
振荡电流Ios决定了机械式DCCB的换流能力,而RM-DCCB的Ios不同于传统机械式DCCB,其本质是一种幅值递增的串联谐振电流,典型的波形如图7所示。为精确描述其换流特性,本节从谐振电流Ios的产生过程入手,旨在厘清RM-DCCB的换流数学模型,并作为参数设计的基础。
图7 RM-DCCB电气量示意图 Fig.7 Diagram of electrical quantity of RM-DCCB
2.2.1 谐振特性分析
结合图8分析Ios的谐振过程,图中向上(蓝色)、向下(绿色)箭头分别代表对应电气量的增加和下降。在此明确两个假设:①通流支路与换流支路形成的回路中电阻很小,可忽略不计;②为得到Ios的粗略表达式,考虑到Cp≫CH,不妨先忽略Ios产生过程中预充电压U0的跌落,其波形如图7所示,随后在推导精确表达式时再进行修正。
图8 Ios的产生与SCR导通路径 Fig.8 Generation of Ios and conduction path of SCR
如图8a所示,在首个周期触发对角线桥臂的SCR2和SCR3,随后撤除该触发信号,由于SCR过零才能有效关断,则Cp将对外持续放电并产生逆时针流动的Ios,该电流逐渐增大并对CH充电,CH的电压UCH也会增大,当Ios达到逆时针方向峰值时,Ios的变化率为零,意味着此时电感LH上的压降也为零;由基尔霍夫电压定律可知,此时UCH=U0。
如图8b所示,由于电感LH的续流作用,Ios的幅值虽然在沿逆时针方向减小,但仍会对CH充电,直到Ios下降至零时,Ios的变化率最大,LH的压降最大。此时,UCH达到首个峰值2U0,Ios过零改变方向,SCR2和SCR3在过零点关断。
如图8c所示,Ios过零后变为顺时针方向增大,为了确保Ios的振荡峰值越来越大,在图8c的初始时刻,需要改变Cp对外电压方向,即触发SCR1和SCR4,随后Cp继续对CH施加能量,当Ios达到顺时针峰值时,UCH会变为右正左负。
如图8d所示,Ios从顺时针峰值下降并继续对CH充电,直到UCH达到右正左负的峰值4U0。
随后的UCH电压将按照6U0、8U0、10U0…的规律叠加上升,具体的推导过程不再赘述。
2.2.2 换流数学模型
由上述分析可知,当不计U0跌落时,若RMDCCB每组对角线桥臂SCR2和SCR3(或SCR1和SCR4)的触发频率等于换流支路的固有频率LCf,则每半波周期内UCH的峰值上升2U0。此外,Ios可看作是CH与Cp串联形成的总激励源UE对LH充放电形成的二阶振荡电流,由于Cp≫CH,总等效电容约等于CH,则Ios的振荡角频率ω及固有频率LCf可分别由式(3)、式(4)表示,其峰值Ios_max可由式(5)计算[32]。
以式(5)为基础,结合UCH上升规律,并考虑到首半波内UCH的幅值与U0方向相反,可得Ios随时间t变化的简略表达式为
式中,n为Ios(t)处于第n个半波周期;ceil(·)为向上取整函数。
然而,在精确设计RM-DCCB换流支路电气参数时需考虑U0在放电过程中的跌落,如图7的黑色线所示。事实上,方波激励源的电容Cp对CH及LH的放电是一个能量转移的过程,结合图7及能量守恒定律可知,CH在电压为零的瞬间储能为零,此时Ios达到半波内的峰值,相当于Cp释放的能量全部转移到LH,因此可得
式中,Ios_max_(n-1)为第n-1个半波周期的Ios峰值;UE_(n)为方波激励源在第n个半波周期的电压峰值。
进一步利用迭代法,即在n每增加1时,将式(9)中电压幅值增加2|UE_(n)|,可得到振荡电流随时间的精确解析表达式Ios(t),也即描述RM-DCCB换流特性的数学模型。
3 RM-DCCB换流支路电气参数设计
3.1 参数设计方法
本节参数设计的目的是在满足RM-DCCB快速、可靠开断要求的前提下,寻找换流支路电气参数(高压电容CH,预充电容Cp及其预充电压U0、电感LH)的最优组合,以实现RM-DCCB的紧凑化、低成本。为此,结合RM-DCCB的换流特性及开断过程,给出如下5个约束条件及1个优化目标。
约束①:为确保直流电流的可靠换流,振荡电流峰值应大于待开断直流电流最大值。

约束②:为实现快速开断,t1~t4阶段对应的截断时间应小于5ms[33]。
约束③:为防止FVS重击穿,t3~t4阶段内UCH的增长速度应小于FVS介质强度UFVS_d恢复速度。
约束④:为保证快速SCR安全,换流支路固有频率fLC应小于SCR的极限工作频率fSCR_max。

约束⑤:为降低元件耐压要求,应确保Cp及其充电系统无明显过电压,根据串联电容分压原理可得

式中,UCp为Cp在暂态开断过程中承受的电压;UMOA为MOA的最高电压;k为可靠系数。
优化目标:为降低RM-DCCB的体积和成本,其总电容容量WS应尽可能小。

在上述约束条件及优化目标的指导下,可得到如图9所示的参数设计方法(图9中序号与约束条件的序号相对应),并在3.2节展示设计示例。
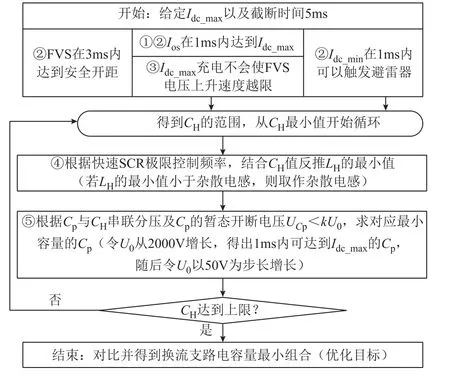
图9 换流支路电气参数设计方法步骤 Fig.9 Step diagram of electrical parameter design method of commutation path
3.2 参数设计示例
以额定电压Urate为100kV,额定电流Irate为3kA,最大开断电流Idc_max为20kA的RM-DCCB为例,FVS的动作时间为3ms,则Ios_max需在1ms内达到20kA(对应约束①)。
Irate对应CH充电最慢工况,则将式(11)的Idc代换为Irate,即可得CH最大值为30μF(对应约束②)。
由于FVS的介质强度恢复速度约为1kV/μs[34],考虑Idc_max为CH充电最快工况,由式(11)可得CH最小值为20μF(对应约束③)。
限于现有商用快速晶闸管的技术水平(fSCR_max约为10kHz),则fLC需小于10kHz。因已知CH不小于20μF,由式(4)可得LH应大于12.67μH。现有100kV电压等级的DCCB的杂散电感约为50μH[35],为减小换流难度,将LH取作杂散电感(对应约束④)。
由于MOA的电压比约为1.6倍[34],则考虑一定的裕量,UMOA也不超过170kV。由式(13)可知,在CH、U0及k确定的情况下,Cp存在一个下限(对应约束⑤)。
随后,以式(6)和式(9)为基础,利用枚举法进行优化。从CH最小值20μF开始,设k为1.2,将U0的变化范围设置为2 000~3 000V,变化步长取为50V,令Cp从最小值以0.5mF步长增长,可得到如图10a所示的,1ms内可开断20kA电流的所有U0、Cp组合。取容量最小组合,即U0为2 100V,Cp为8.1mF。
之后,令CH以1μF步长增长,得到CH变化时对应的Cp和U0最优取值,并在图10b中示出这些工况下的Cp的容量WCp、CH的容量WCH和总电容容量WS。取WS最小组合,即LH、CH、Cp、U0分别为50μH、20μF、8.1mF、2.1kV。
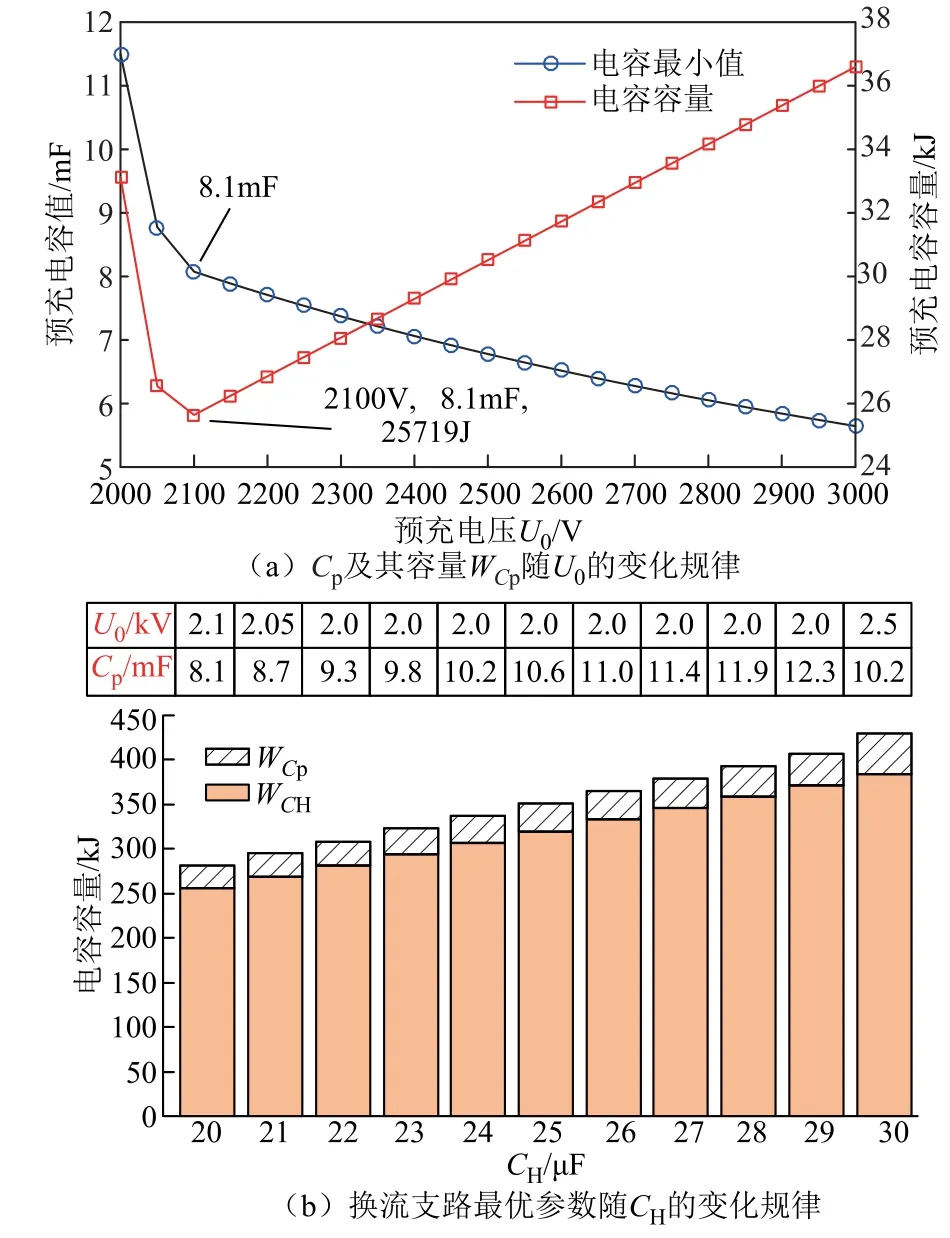
图10 换流支路参数优化结果 Fig.10 Parameters optimization results of current commutation path
4 仿真验证及方案对比
4.1 换流模型及参数设计方法验证
以图10b对应的最优参数为例,对换流数学模型及参数设计的正确性进行验证。图11a的Ios解析计算结果源于式(6)和式(9),它与PSCAD的仿真结果基本吻合,说明2.2节的数学模型足够准确。此外,如图11a所示,Ios在1ms内能恰好达到20kA;由图11b可知,开断3kA电流时,CH充电时间(从电流熄弧时刻到吸能支路导通的时间段)约为782.3μs,证明了参数设计方法的正确性。
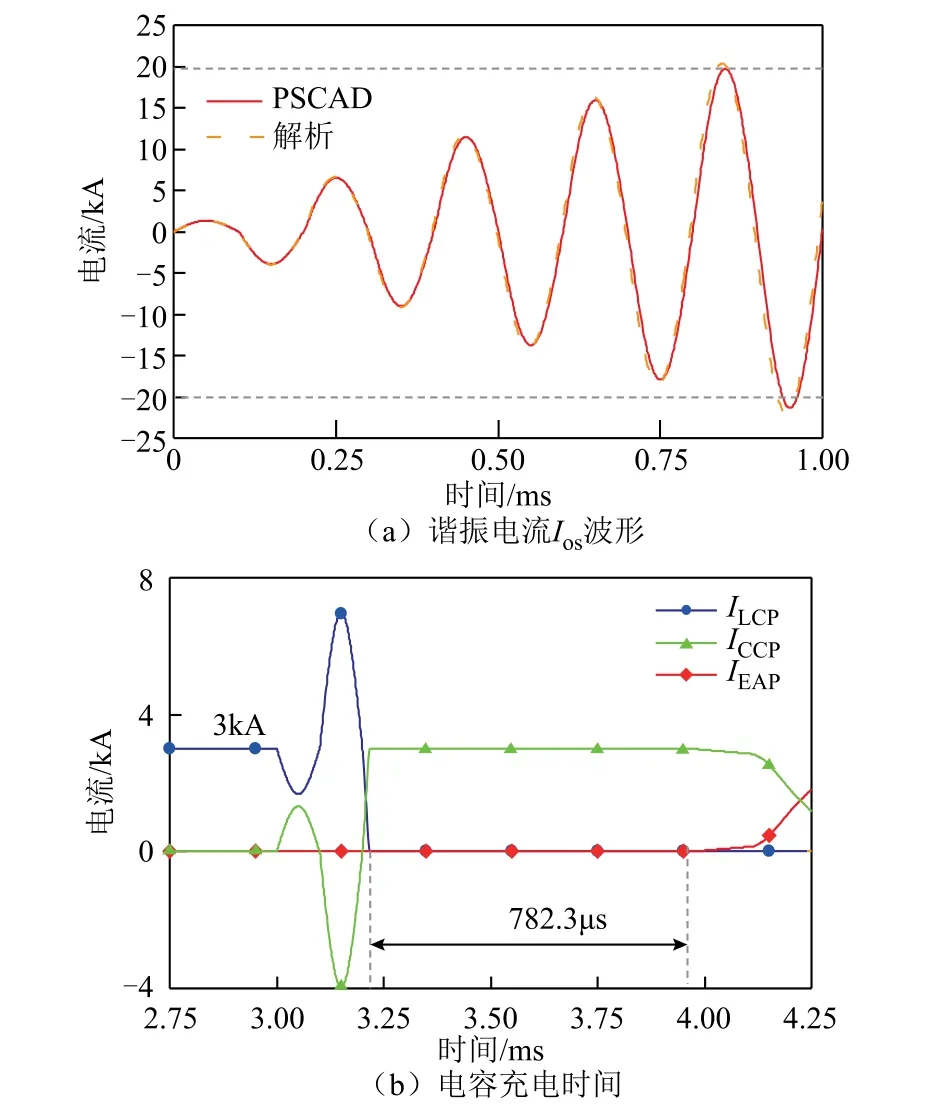
图11 换流数学模型及参数设计正确性验证 Fig.11 Correctness verification of commutation mathematical model and parameter design
4.2 故障开断仿真
以一个±500kV四端直流电网进行仿真分析,其结构如图12所示,参数见表2。
在PSCAD/EMTDC中搭建如图12所示仿真模型,RM-DCCB采用5个100kV模块串联的方案以降低FVS的单断口耐压[36],其中每个100kV模块参数 取3.2节的优化值,得到如图13所示的故障开断波形。
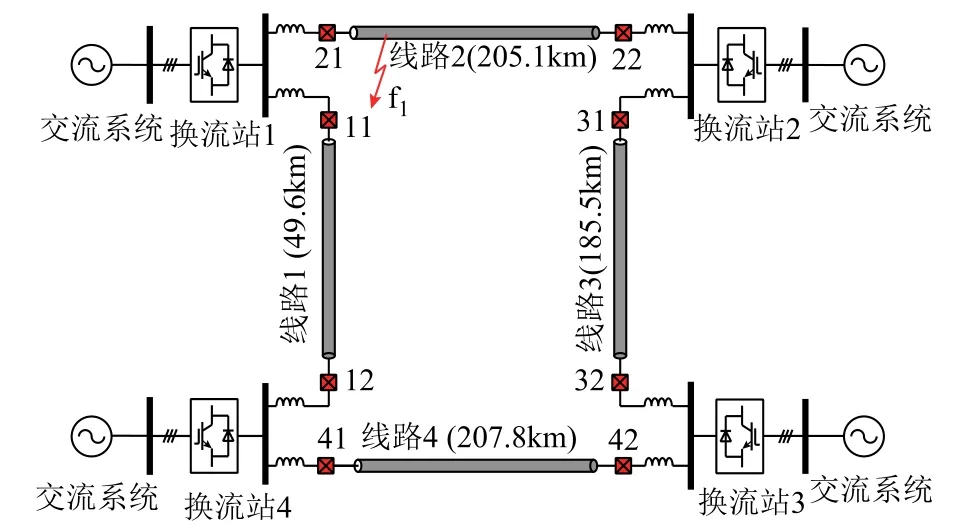
图12 四端双极直流电网结构 Fig.12 Configuration of four-terminal bipolar DC grid
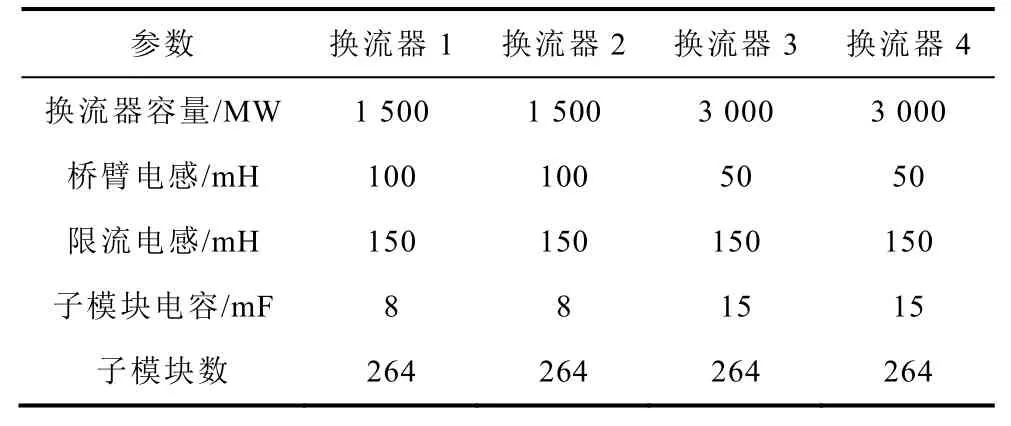
表2 四端双极直流电网参数 Tab.2 Parameter of four-terminal bipolar DC grid
在图13a中,t0为0.6s时发生故障;t1为0.601 0s时,FVS的动、静触头分离并燃弧;t2为0.603 0s时,按照换流支路固有频率轮流导通快速晶闸管SCR2、SCR3或SCR1、SCR4;t3为0.603 4s时,Idc过零并转移到换流支路;t4为0.603 8s时,换流支路的电压达到MOA参考电压,则MOA被导通并迫使Idc(IEAP)下降;t5为0.610 8s时,Idc在接近零 时被残余电流开关开断。
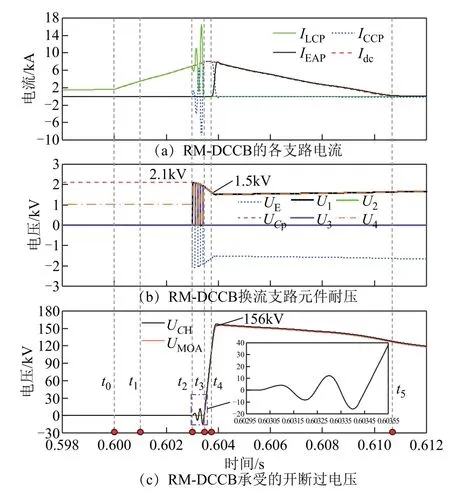
图13 故障电流开断波形Fig.13 Interruption waveforms of fault current
由图13b可知,Cp在换流阶段对外呈现的电压激励UE频繁改变正负极性,且Cp的电压UCp波动很小,即Cp及其充电系统的耐压要求较低。此外,SCR1~SCR4的耐压U1、U2、U3、U4均小于3kV,这也是将RM-DCCB归为机械式DCCB的原因。
由图13c可知,5个100kV的RM-DCCB模块总残压UMOA为780(156×5)kV,足以迫使Idc衰减。由UCH波形可知,它在方波激励源的充电作用下振荡上升,这也是Ios能够振荡增大的原因。
4.3 方案对比
以文献[9, 18, 24, 27]所示的机械式DCCB与本文RM-DCCB对比,将其所需的电容容量均转换为100kV×10kA开断容量下的等效值,对应的结果见表3。其中,CH、Cp折合后的容量WCH_1000MW、WCp_1000MW可分别参考式(15)、式(16)。
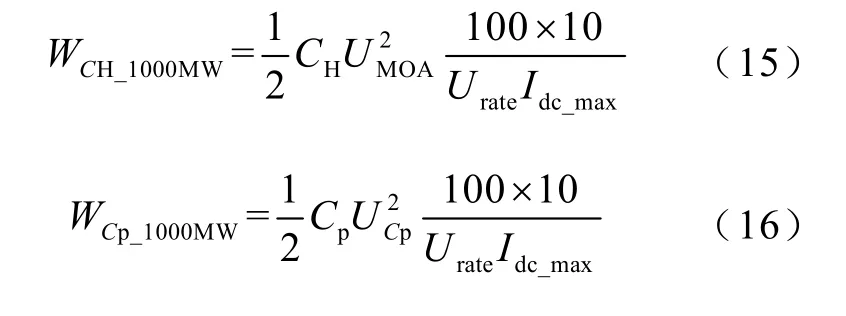
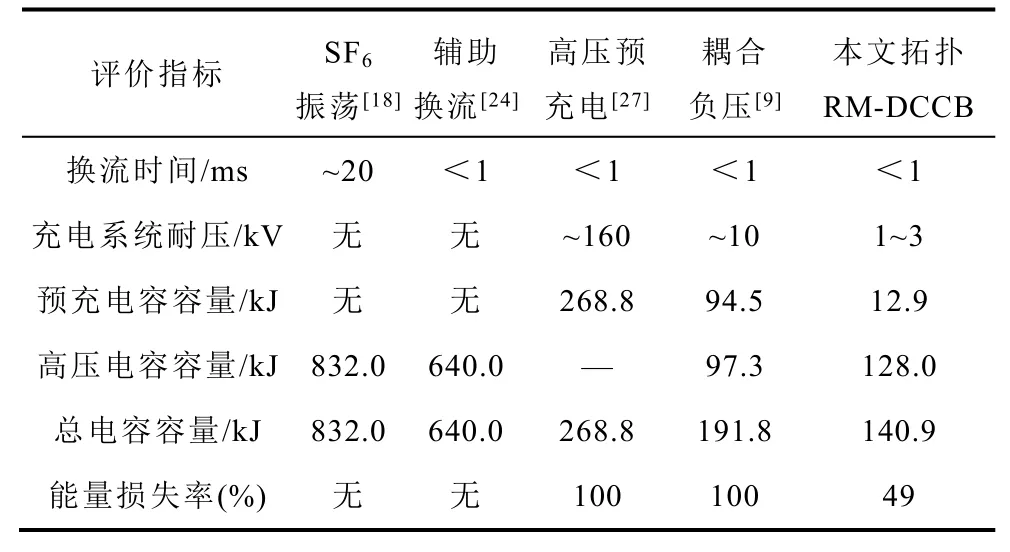
表3 不同拓扑的性能对比 Tab.3 Performance comparison of different topologies
由表3可知,RM-DCCB的技术优势如下:换流时间可达传统有源型机械式DCCB同等水平(开断速度快);充电系统耐压要求大幅降低(研制难度低);需配置电容的总容量最低(体积、成本小);每次开断的预充能量损失率最低(易于实现短时间内的快速充电及再次开断)。
此外,为对比半控型与全控型RM-DCCB的换流性能,将其Ios波形示于图14中。由于IGBT的控制灵活且关断时间小于1μs;而快速SCR存在约10μs的恢复时间,会造成一定的关断延时[37]。在SCR恢复期间,Ios通过SCR的反并联二极管续流。为保证前组SCR的可靠关断,以防止Cp短路,需适当延迟下组SCR的触发;在此期间,Cp无法对CH充电,因此Ios峰值比全控型略小(以本文换流参数仿真,相差约3%)。Ios峰值相差较小的原因是:如图14所示,SCR恢复阶段的谐振电流Ios接近于零点,其积分面积(对外充电)也较小。
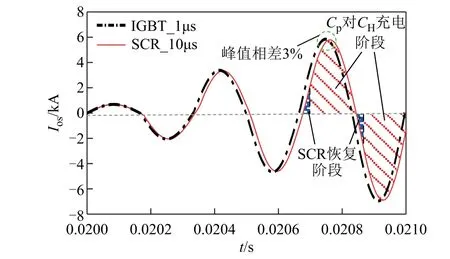
图14 半控型与全控型RM-DCCB的IosFig.14 Ios of semi and fully controlled RM-DCCB
可见,快速SCR在提升RM-DCCB经济性的同时,略微降低了其参数匹配及换流能力。上述现象意味着半控型RM-DCCB开断相同幅值直流电流时,可能需要多等待一个振荡周波,但考虑到目前机械式DCCB换流频率约为数千赫兹[38],即便多等待一个周波时间(约百微秒)也是可以接受的。
5 结论
为降低机械式DCCB的换流时间、充电系统耐压要求、预充能量、能量损失率、机械开关熄弧压力,促进机械式DCCB的轻型化发展,提出一种基于快速晶闸管的RM-DCCB。研究了RM-DCCB的换流特性及参数设计方法,基于PSCAD/EMTDC的仿真验证了上述内容的正确性。具体结论如下:
1)不同机械式DCCB的换流过程可描述为电压激励在LC回路引发的振荡过程,其换流能力由电压激励及换流回路的电容、电感决定。
2)通过精确控制快速晶闸管的导通时间,确保电压激励的频率与换流支路固有频率相同,使RMDCCB产生串联谐振现象,可实现不同幅值直流电流的可靠换流。
3)基于双电容构造的换流支路,在换流过程中需考虑预充电容的电压跌落,实现RM-DCCB电气参数的准确设计。