移动测量激光点云数据精度评价与快速校正方法
2022-05-09黄志
黄志
(1.重庆数字城市科技有限公司,重庆 401121; 2.重庆市移动测量工程技术研究中心,重庆 401121)
1 引 言
近年来,移动测量技术受到各行业的广泛关注,随着传感器技术和空间信息技术的快速发展,成为工程测量、城市部件普查、大比例尺地形图测绘等领域广泛应用的高科技测绘技术[1~4]。车载移动测量系统由激光雷达、全景相机、惯性测量单元(IMU)、全球导航卫星系统接收机、旋转编码器(DMI)等传感器组成,具有数据丰富、获取速度快、精度高等特点,是目前最先进的地面空间信息获取技术之一[5,6]。
车载移动测量系统作为一种测绘技术装备,其精度是最主要的评价指标,包括内部因素和外部因素两个方面[7]。其中内部主要影响因素是激光雷达的锥扫角标定、各传感器相对位置标定和各传感器之间的时间同步精度,使用精确的测量仪器和有效的时间同步机制能使内因可控;外部因素包括天气、GNSS基站精度、GNSS接收机信号等不可控的因素[8],因此外部因素很难控制。因此,为了提高点云数据的精度,对点云数据的精度进行评价和校正很有必要。
在点云数据精度评价方面,陈曦等[9]使用南方测绘和中海达提供的移动测量系统分别采集黑龙江地理信息产业园的点云数据,通过使用控制点与点云比对,评价点云精度;陈洪等[10]选用具有特征的地物的位置信息对农作物点云数据精度进行评价,并分析了影响精度的因素;陶鹏杰等[11]使用高精度DLG的高程点和点云墙面点在平面上的投影点到DLG房屋矢量轮廓线的距离来实现对点云高程和平面精度的评价。上述方法都是人工采集控制点的思想,针对大规模点云数据来说,实施工作量较大。在点云数据精度校正方面,潘家宝[12]在采集区域内布设一定密度的靶标点,通过测量靶标点的高程来对点云高程进行校正,可有效提高点云高程精度;陈世荣等[13]在高速路两侧布设一定间距的靶标点,使用靶标点校正高速路点云,可在一定范围内提高高速点云精度;孙波中等[14]从控制点布设网形和布设密度两方面设计试验来校正点云,从实验角度提升了点云精度;郭如宝[15]利用航带重叠区域内的地面点和建筑点云提取连接线,并进行最小二乘匹配,计算航线的改正值从而实现点云的校正,可有效提高机载点云的精度。然而针对大规模点云,快速进行点云数据精度评价和校正研究太少。
本文利用RTK多基站、高精度、实时差分等特点,使用集成在移动测量系统上的RTK设备,按一秒间隔记录实时差分定位数据,以时间为基准与位置姿态数据进行对齐,实现点云数据的快速评价与校正,并通过实验对比分析本方法的有效性。
2 精度评价
车载移动测量激光点云数据的应用中,绝对精度是非常重要的一个评价指标,针对不同的应用目的,激光点云的精度要求不同,如大比例地形图测绘要求精度比用于建模的点云精度更高。对大规模点云精度的评价,一方面要考虑评价的效率,另一方面要保证评价的准确性和全面性。
POS(位置姿态)数据是决定点云精度的关键数据,它是由IMU(惯性测量单元)数据、DMI(旋转编码器)数据、连续运行基准站数据、移动站数据通过后处理生成,使用单基站模式,通常位置精度为分米级。网络RTK(实时动态差分技术)是实时处理多个测量站载波相位观测量的差分方法,能够在野外实时得到厘米级定位精度。通过将网络RTK设备集成到移动测量系统中,在移动测量设备采集过程中记录系统的高精度位置数据,然后通过时间与POS数据进行配准,计算匹配点之间的误差,从而实现大规模点云数据精度的快速评价。具体步骤如图1所示:
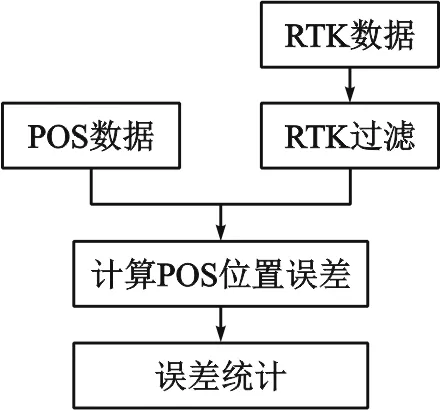
图1 点云精度评价流程
(1)RTK过滤
RTK设备的精度会受到遮挡、高压线、天气等因素的影响,为了将RTK位置精度控制在一定范围内,需要对RTK数据过滤。在RTK记录数据中有VDOP、HDOP属性值,分别用于评价RTK数据的高程精度和平面精度,通过设置高程误差阈值和平面误差阈值,将由于外界因素影响而导致误差过大的RTK数据过滤,从而将RTK数据精度控制在允许的误差范围内。
(2)计算POS误差
在对误差进行统计时,将RTK数据过滤阈值设置为毫米级,可以认为RTK数据为该位置点的真值。将RTK数据的时间与POS数据的时间配准,计算时间匹配点的POS位置误差。设M(Xm,Ym,Zm)为POS点位置,与M时间匹配点N(Xn,Yn,Zn)为RTK位置,则其绝对精度误差如式(1)所示:
(1)
(3)误差统计
由于POS点误差具有累积性,同时可视为真值的RTK位置数据具有随机性,因此将所有与过滤后的RTK数据时间匹配的POS点求平面位置中误差和高程中误差,即求得POS数据的误差,进而评估了使用POS数据解算的点云数据的误差。设dxi,dyi,dzi分别为第i个时间匹配点的X方向上的误差,Y方向上的误差,Z方向上的误差,则平面误差如式(2)所示:
(2)
高程误差如式(3)所示:
(3)
其中n为POS与RTK时间匹配的位置点数,Dh为平面误差统计值,Dv为高程误差统计值。
3 校正方法
通过对点云精度评估,并结合点云的用途,分析点云是否满足精度要求,若满足精度要求,则可以直接使用原始POS数据生产点云数据,从而省去了原始POS校正的中间环节。针对不满足精度要求的点云,设计了基于RTK的点云校正方法。移动测量数据点云数据校正流程如图2所示。通过RTK数据与POS数据配准,然后对POS数据进行校正获得高精度POS数据,最后进行点云解算获得高精度点云数据。
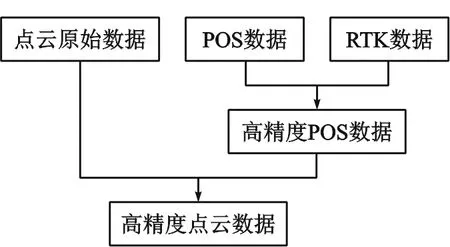
图2 点云数据校正流程
如图3所示,K1(Xk1,Yk1,Zk1)、K2(Xk2,YK2,Zk2)为RTK点,S1(Xs1,YS1,Zs1)、S2(Xs2,YS2,ZS2)分别为RTK对应的POS点。则S1与K1的误差计算公式为:
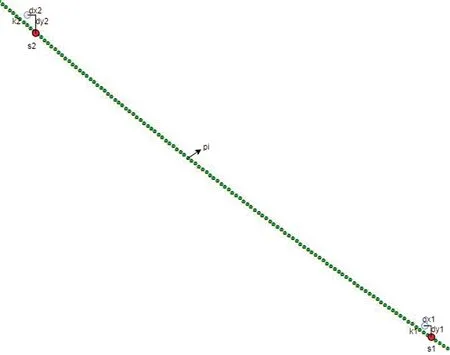
图3 POS数据
(4)
S2与K2的误差计算公式为:
(5)
根据式(4)、式(5),可得S1、S2之间POS点Pi的平差,如下式。
(6)

则校正后的POS点坐标为:
(7)
其中(xpi,ypi,zpi)为第i个POS点原始坐标。
4 实验分析与结论
实验使用重庆数字城市科技有限公司、重庆市勘测院联合研制的车载移动测量系统DCQ-MMS-X3采集点云数据,控制点数据由徕卡全站仪MS60(精度可达毫米级)采集,如图4所示,总共采集 10 km的移动测量点云数据,200个控制点数据。共进行了两个实验,一是精度评估实验,比较使用控制点评估点云精度和使用RTK数据评估点云精度;二是RTK数据校正实验,用控制点数据验证校正后点云的精度。

图4 点云及控制点数据

使用控制点统计精度情况表 表1

使用RTK数据统计精度情况表 表2

使用RTK数据校正后精度统计情况表 表3
在使用外业人工采集的控制点评价点云精度实验中,在测区范围内均匀采集了200个控制点,然后在生产的点云数据中找到同名点,表1显示了统计的精度;在使用随系统的RTK点评价点云精度过程中,将平面误差过滤阈值设置为 0.008 m,高程误差过滤阈值设置为 0.01 m,过滤后总共443个点,通过时间与POS匹配来统计误差,表2显示误差统计结果;通过比较,两种方法的统计误差差值在毫米级。
在使用RTK数据校正点云实验中,将平面误差过滤阈值设置为 0.01 m,高程误差过滤阈值设置为 0.015 m,对POS数据进行校正,然后使用校正后的POS生产点云,最后使用外业采集的控制点统计点云误差,表3中显示了校正后精度大幅提升。将过滤阈值设置为不同的值,阈值在一定的区间内,点云误差相差不大;阈值过大,达不到校正目的,阈值过小,会使过滤后的RTK数据变少,产生点云局部误差过大情况。
实验结果表明,车载移动测量系统点云数据精度可以使用RTK数据来进行精度评价,选择合适的RTK过滤阈值,对POS数据进行校正,然后使用校正后的POS生产点云,能够提升点云的精度。
5 结 语
本文设计了一种车载移动测量系统点云数据精度评价与校正方法,将RTK设备随移动测量系统架设,连续记录RTK数据;通过时间与POS数据进行配准,然后进行点云精度评价和校正,并通过实验验证了该方法的有效性。借助该方法,省去了外业采集控制点的工作,提升了工作效率和点云精度,为高精度激光点云数据的应用提供支撑。
