利用kNN方法的沥青路面平整度智能检测
2022-04-29曾靖翔张金喜曹丹丹吴洋陈广华
曾靖翔 张金喜 曹丹丹 吴洋 陈广华
(1.北京工业大学 交通工程北京市重点实验室,北京 100124; 2.交通运输部公路科学研究院 基础研究创新中心,北京 100088)
路面性能中的IRI(国际平整度指数)是评价道路路面技术性能的重要指标[1]。目前常用的IRI检测方法是通过专用车辆搭载专业检测设备的方式对路面IRI进行检测[2]。这种检测方法的检测结果相对准确,但检测成本昂贵、检测频率低,不能实现对道路路面的实时性检测[3]。截至2020年底,中国公路总里程达到501.25万公里、高速公路总里程达15.00万公里[4]。随着道路设施规模的不断扩大和人们生活水平的提高,道路养护任务不断增加[5]。如何利用新兴技术及时发现道路路面平整度存在的问题,实现低成本的路面IRI实时性检测并逐步实现实时监测,从而提高道路的行驶质量而且能够减小养护成本,对于我国道路基础设施建设和发展具有重要意义[6]。我国现行的《公路技术状况评定标准》(JTG 5210—2018)[7]中对IRI的评价规定了详细的分级标准,如表1所示。IRI指标是重要的路面性能指标,是道路养护管理单位进行路面养护决策的重要依据,对IRI的快速检测具有重要的实际应用价值。
表1 IRI分级标准
路面平整度受多种因素的影响,沥青路面的常见病害有裂缝、车辙、松散、沉降等都对IRI产生影响[8]。路面平整度不佳将会危及行车安全、降低交通效率、增大维护成本。当车辆在路面上行驶时,路面的平整度会通过车辆悬架系统以振动加速度的形式反映到车内[9],因此,车辆行驶过程中的振动加速度可以间接反映路面的平整度状况。目前智能手机功能丰富,除内置有精度较高的三轴向振动加速度传感器外,还内置有GPS模块能够采集位置数据,这些传感器被广泛应用于计步、导航等不同领域。利用智能手机的内置传感器采集行车过程中的振动加速度等数据用来评价路面平整度,成为近年来路面性能智能化检测和评价的一个研究热点[10]。但由于手机类型、车辆类型、行车状态等状态的复杂性,利用该技术的路面平整度预测精度尚未达到令人满意的程度。
临近算法kNN(k-Nearest Neighbor)是数据挖掘分类算法中被广泛应用的一种,是利用k个最邻近的数据反映本数据类别特性的方法[11]。kNN算法的核心思想是,如果一个样本在特征空间中的k个最相邻的样本中的大多数属于某一个类别,则该样本也属于这个类别,并具有这个类别上样本的特性。该方法在确定分类决策上只依据最邻近的一个或者几个样本的类别来决定待分样本所属的类别[12]。kNN算法在交通领域应用广泛,XIAO[13]利用kNN算法实现对交通事件的监测。霍豪等[14]利用kNN算法对公交到站时间进行预测。林培群等[15]利用kNN对地铁短时客运量进行预测。同时针对kNN算法的改进也已有研究,SUN等[16]还提出了一种自适应的k值选取方法,选用距离最近邻居样本点的k值作为自己的最优邻居数,用来提高kNN算法的准确率;为了减少kNN算法冗余的距离计算,降低时间复杂度,匡振曦等[17]提出了一种基于聚类的环形kNN算法,通过k-means聚类方法改进kNN算法,有效降低了算法的时间复杂度。kNN方法在类别决策时,只与极少量的相邻样本有关,由于kNN方法主要靠周围有限的邻近的样本,而不是靠判别类域的方法来确定所属类别,因此对于类域的交叉或重叠较多的待分样本集来说,kNN方法较其他方法更为适合。kNN分类方法具有易于实现、无需训练、易于理解的优点。
本文利用智能手机采集行车过程中的振动数据,提出有效振动加速度指标,利用kNN的数据挖掘方法,实现对沥青路面IRI的智能检测,并提高路面平整度IRI的检测精度。
1 试验方法
1.1 试验设备
为了能够利用智能手机采集用户行车过程中的数据,ZENG等[18]开发完成了专用行车数据采集智能手机App软件,App界面图见图2所示。
通过安装App,操作人员能够通过简单的操作将行车过程中的数据进行采集,采集的数据主要包括三轴向振动加速度数据、GPS地理位置数据、时间数据。为了让App操作人员清楚的看到采集的数据,App以地图为背景,可以向用户展示本次检测的路线(图1(a)),并可以看到实时的数据变化情况。轨迹图的上方有实时的振动加速度数据、振动角速度数据、行车速度数据组成的数据实时图(图1(b)),点击数据实时图能够实现轨迹图与数据实时图的相互切换。采集频率、采集数据的行车速度范围、采集数据的时间长度范围可以在App设定界面(图1(c))进行设定,行车速度范围和加减速范围能够对采集的数据进行初步筛选,将不属于行车时的数据有效的筛除。历史数据管理页面(图1(d))能够清晰显示当前用户所有的试验记录。历史数据管理页面不仅能够看到本用户的试验记录,更能够确保试验数据在一段时间内保存在手机内,保证数据的安全性。作为试验产品,目前用户需要进行注册才能使用App,数据的采集应得到手机用户的同意,并符合相关法律规定。

图1 App的部分界面
前期研究发现,不同的手机感知的振动加速度有一定的差异,但总体趋势具有高度一致性。考虑到不同手机的影响,本文选择了市场上具有代表性的华为、小米和OPPO3款不同厂家智能手机开展行车试验以便尽可能考虑不同手机的影响。3部手机均能够采集三轴向振动加速度数据、GPS数据、时间数据。手机采集数据的频率直接关系到手机电量的消耗,本研究采集三轴向振动加速度数据的频率固定为10 Hz,GPS数据的采集频率为1 Hz。
试验车辆选用搭载专业路面检测仪器的检测车,该车辆养护良好,检测设备工作正常。如图2所示,专用检测车辆的车型属于MPV车型,车辆经过改装,车辆前排依旧保持驾驶功能,车辆的后排座椅被专用的路面检测仪器代替。该检测车具有较完善的功能,车辆后排的专用设备需要专用操作人员进行操作,能够同时对路面的平整度、车辙指数、路面破损指数进行检测,车辆的检测精度高,道路检测单元最小为20 m,即最小以20 m为单位对道路路面性能进行评价。

图2 试验设备
1.2 试验路段
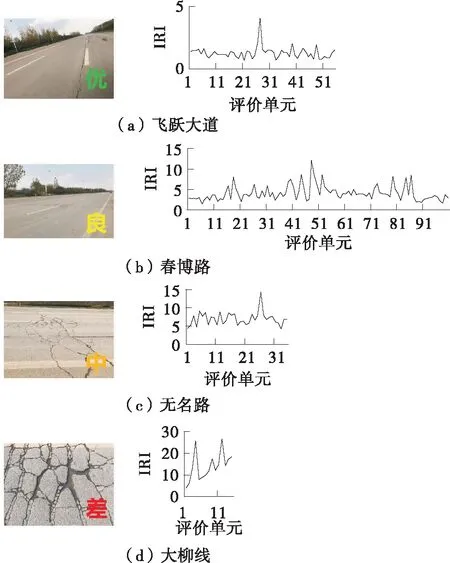
为研究不同路面IRI对行车振动数据的影响,行车试验应在路面性能IRI具有广泛代表性的路面上开展。同时,所选择的试验路路线为直线、交通量小,保证行车试验的行车安全,并尽量减小除路面性能和行车速度之外的其他因素的影响。选择的试验路段情况见表2和图3所示。

表2 试验路段情况说明
评价单元长度为20 m
飞跃大道为通车时间约1年的城市道路,双向2车道,道路长度1 123 m,路面IRI最大值4.0 m/km、最小值0.9 m/km,路段IRI平均值为1.27 m/km,路况良好,路面存在少量裂缝;春博路为通车时间约3~4a的城市道路,双向4车道,道路长度1 944 m,路面IRI最大值12.0 m/km、最小值2.0 m/km,路段平均值为4.0 m/km,路面局部存在少量破损和裂缝的病害情况;无名路为通车时间约3a的城市道路,双向2车道,道路长度744 m,路面IRI最大值14.0 m/km、最小值4 m/km,路段IRI平均值为6.99 m/km,路面后半程存在连续破损的情况;大柳线为通车时间约10年的城市道路,双向2车道,道路长度388 m,破损、坑槽、车辙等病害较大,路况较差,处于大修前状态,路面IRI最大值28.0 m/km、最小值4.0 m/km,路段平均值为13.8 m/km。
1.3 试验方案
行车试验利用检测车开展,采集行车数据的智能手机固定在检测车上。每次试验时使用手机有两部,分别固定在前方驾驶台和车辆中间部位。变换不同手机的组合开展多次重复试验。试验开始前在智能手机安装数据采集App,打开App并使之处于采集状态。
检测车自试验路起点前200 m左右开始加速行驶,当检测车到达试验路起点时行车速度达到检测车要求的检测速度,并以尽可能匀速通过试验路。当检测车通过试验路起点和终点时,试验员记录时间并确保手机App处于正常检测状态。
试验结束后,按检测车通过试验路起终点时间,将采集的行车数据与路面长度进行匹配并以20 m为一个单元,得到不同路面单元的行车数据。同时利用检测车检测数据,得到不同检测单元的IRI数据。最后,将路面行车数据与路面IRI数据建立对应关系,分析利用行车振动数据检测路面平整度IRI的可能性。
2 kNN算法在IRI检测中的应用
2.1 振动加速度特征指标
常用的路面性能IRI引起的车辆振动的分析方法是1/4车辆模型法,这种方法是以车辆简化模型为分析手段,量化车辆悬架系统的各个参数,从而建立路面平整度与振动加速度的关系。在1/4车辆模型中,以车辆为坐标系的Z方向振动加速度是反映路面平整度的主要行车振动加速度指标[19],Z方向振动加速度指标被广泛用来评价路面平整度和行车舒适性。
在本研究中,考虑到智能手机固定的位置、方式等的随机性和不确定性,很难准确得到以车辆为坐标系的Z方向振动加速度。如图4所示,图4(a)表明以车辆为坐标系的三轴向振动加速度方向,图4(b)表明以智能手机为坐标系的三轴向振动加速度方向。由于智能手机固定在车辆中的姿态不能确定,即单独一个方向的振动数据没有实际的物理意义,为此,在前期研究基础上,文中利用合成振动加速度作为行车振动加速度指标进行分析,计算方法如下:
(1)
式中:ac表示合成振动加速度;aX、aY、aZ分别表示手机坐标系下X、Y、Z方向振动加速度;g表示重力加速度。
在计算一个路段内的振动加速度指标时,路段内合成振动加速度ac又可分为路段内平均值、路段内最大值、路段内最小值、路段内标准差、路段内绝对值的平均值、路段内绝对值的最大值、路段内绝对值的标准差等7项指标,为便于进行路面平整度的分析,应从7项指标中找出与IRI关系最密切的振动加速度指标。在前期研究中,分别建立了路面平整度与上述7项指标的关系模型,利用相关系数评价指标与路面IRI的相关性,结果发现“合成振动加速度路段内最小值Minac”与路面平整度IRI具有最好的相关性。为此,文中选择“合成振动加速度路段内最小值Minac”作为间动加速度特征指标,具体分析过程在此不再赘述。
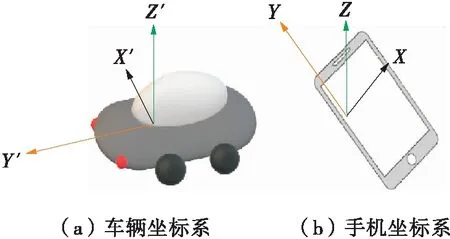
图4 振动指标方向示意图
2.2 IRI-Minac回归模型
路面平整度IRI的变化将引起路面行车振动加速度的变化,而路面行车速度也是影响行车振动加速度变化的主要因素[20]。图5为同一条道路上以不同速度行驶时采集的合成振动加速度ac,单独一个较大点表明路段对应位置上有一个单独的破损,几个较小点表明路段对应位置上有连续几个较小的破损。可以看出,当车辆以不同速度行驶经过路面时,振动指标出现明显变化,振动指标的变化程度受行车速度影响大,行车速度是利用行车振动检测路面IRI的考虑因素之一。
文中行车试验中,虽然尽可能保持行车速度稳定,但由于交通量、交通信号灯等的影响,检测车行驶速度是在一个范围内变化的。因此,在后续分析中,将行车速度也作为影响因素进行考虑。
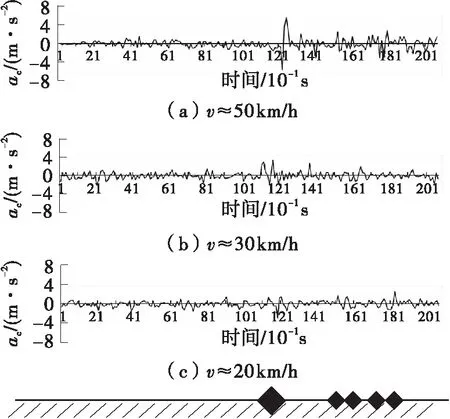
图5 行车速度对ac的影响
文中行车试验中,虽然尽可能保持行车速度稳定,但由于交通量、交通信号灯等的影响,检测车行驶速度是在一个范围内变化的。因此,在后续分析中,将行车速度也作为影响因素进行考虑。
考虑路面平整度IRI、行车速度v的影响,文中首先利用试验数据计算出振动指标,利用Matlab建立IRI的多元线性回归检测模型如下:
IRI=0.92+0.048v-0.28Minac
(2)
式中,IRI表示国际平整度指数,v表示行车速度,Minac表示合成振动加速度路段内最小值。
式(2)中的R2为0.35,比较低。用式(2)对文中的试验数据进行分析,按表1所示标准对IRI进行等级分类评价。结果表明,检测车的分类评价结果与智能手机的分类评价结果的匹配度为63.23%,即智能手机的分类评价准确度为63.23%。利用其他回归方法进行的分析也发现,利用简单的回归分析方法不能建立具有较高精度的IRI检测模型,提高IRI检测精度需要新的数据处理方法。
2.3 kNN算法
2.3.1 原理说明
邻近算法,或者说k最近邻分类算法是数据挖掘分类技术的方法之一。所谓k最近邻,就是k个最近的邻居的意思,即每个样本都可以用它最接近的k个邻居来代表[21]。如图6所示,特征空间由两个特征向量组成,按照特征空间将数据分为3个类别W1、W2、W3,利用欧氏距离在特征空间中寻找距离新数据Xu最近的k个数据,将k个数据中类别最多的一个类别作为新数据的类别。
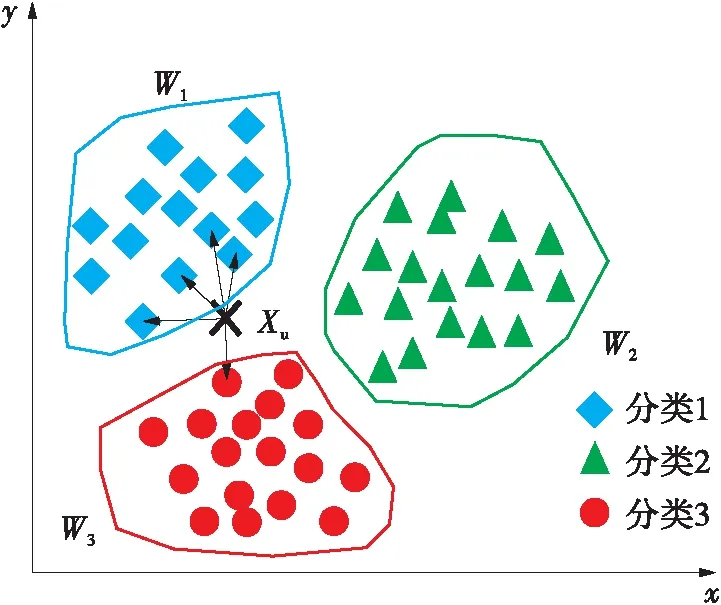
图6 kNN分类方法原理图
本文的kNN特征空间以行车速度和路段内合成振动加速度最小值作为两个特征向量,试验路的分类标准按表1“普通公路”的标准进行。由于本试验获得的行车试验数据有限,文中采用交叉验证的方法确定kNN算法的k值,当k=7时分类的准确度最高。新数据的分类依据采用常规的欧氏距离指标进行判别。本研究通过试验数据建立特征空间,对于一个新的数据,计算并寻找距离该数据欧氏距离最近的7个数据,由7个最近数据中类别特征最多的类别决定新数据的类别。如果欧氏距离最近的7个数据中出现相同分类个数的情况,则选取欧氏距离最近的点作为新数据的分类。文中将原始行车试验数据的70%用作建立特征空间,原始行车试验数据的30%用以对建立的kNN分类方法进行验证,具体分析过程在此不再赘述。
2.3.2 kNN应用与优化
kNN分类方法对建立特征空间的数据有很强的依赖关系,良好的特征空间可以提高算法的准确度。另外,不同kNN分类的数据量也是影响算法精度的主要因素,不同分类的数据量应保持在均衡状态。本文中,按表1所示的“普通公路”的等级分类标准进行等级分类,试验路路面平整度IRI分别位于优、良、中、差4个等级中的数据量分别为195组、85组、48组和84组,最少的为48组(中),最多的为195组(优),有较大的不均衡性。为此,文中以最少的48组数据为基础建立kNN特征空间,对于大于48组数据的分类,采取随机抽取48组数据的方法确定建立kNN特征空间的该分类组基础数据。
依据上述方法建立的kNN特征空间如图7所示。
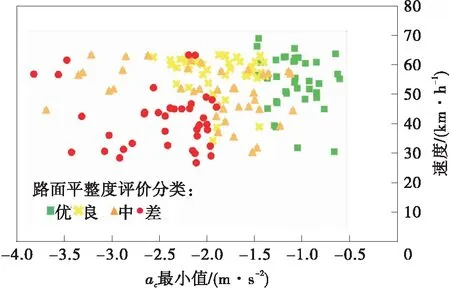
图7 kNN算法特征空间
图7中,kNN特征空间的横坐标为路段内的合成振动加速度数据最小值,变化范围是0.5~4.0 m/s2;特征空间的纵坐标为行车速度,变化范围是30~70 km/h。
图7中,两特征向量的单位不同、变化范围不同,造成两个特征向量对计算结果的影响程度也不同,即变化程度大的特征会起决定作用,而变化程度小的特征作用会被减弱。为了消除特征向量尺度和单位差异的影响,文中对两个特征向量进行了归一化处理。
利用式(3)对两个特征向量进行归一化,结果如图8所示,归一化后的两个特征向量为无量纲指标,其对分类的影响处于同等地位。
(3)
式中,x表示需要进行特征归一化的特征变量,min(x)表示x特征变量中的最小值,max(x)表示x特征变量中的最大值,x′表示归一化后的x特征变量。
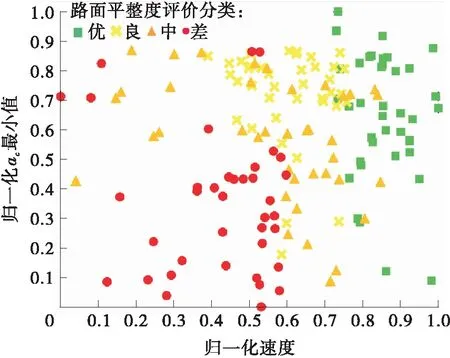
图8 归一化的kNN特征空间
2.3.3 kNN分类结果验证
利用文中行车试验全部数据的70%建立kNN特征向量空间如图8所示,利用其余的30%数据进行文中分类方法准确性的验证。结果表明,利用kNN分类方法对路面平整度IRI分类评价的绝对准确率为78.13%,即kNN分类结果中有78.13%与实测结果完全吻合,其分类准确性高于前述的回归统计分类方法。
对行车振动加速度数据和路面平整度IRI检测数据进一步分析发现,位于IRI等级分界附近的数据的误判率较高。即利用行车振动数据和kNN方法进行IRI等级评价时,IRI位于等级分界附近时,判别结果可能存在较大的波动。进一步分析发现,存在误判的21.87%样本中,有85.7%的样本判别为相邻的等级。如果将相邻判别作为相对准确判断,则文中方法的判别相对准确率达到96.87%。可见不论是绝对准确率还是相对准确率,均高于回归统计模型,文中的方法提高了IRI的智能检测准确率。
文中提出的利用智能手机的路面平整度IRI的智能检测方法是一种对路面平整度IRI的间接的、可以开展实时检测和监测的方法,其主要目的是对路面的IRI状态进行评价和跟踪,为开展进一步详细检测和路网路面的养护决策提供宏观指导。文中方法的绝对评价准确率达到78%以上,而考虑相邻评价后的相对准确率达到96%以上,可以满足上述要求。
3 结语
本文利用自主开发的智能手机App采集行车振动等数据,开展了大量行车试验,研究利用行车数据检测路面平整度IRI的可行性。研究得到以下结论:
(1)文中提出了以合成振动加速度作为行车振动加速度指标的方法,该方法可以去除智能手机固定位置的影响,有助于实现利用智能手机的IRI智能检测。
(2)文中将kNN方法应用于智能手机采集的行车数据的分析,提出了特征向量归一化的特征向量空间。通过该方法,提升了IRI的智能检测精度,且技术简便、易于应用。通过大量数据的进一步应用,监测精度将会进一步提高。
(3)文中方法的IRI智能检测绝对评价准确率达到78%以上,而考虑相邻评价后的相对准确率达到96%以上,可以满足道路路网中路面平整度IRI的实时检测和监测,可以提高路面平整度IRI检测的针对性,减少路面性能总体检测量,为路网路面的养护决策和管理提供宏观指导。
文中的行车数据量、试验工况还不够多。今后应进一步增加行车试验量,增加建立kNN特征空间的基础数据,有望进一步提升IRI的检测精度,为路面性能的检测和监测提供一种新的方法。
