硫酸纸的湿度响应特性及其在软机器设计中的应用
2022-04-19代瑶臧红彬屈涛
代瑶,臧红彬* , , 2,屈涛
(1.西南科技大学 制造科学与工程学院,四川绵阳 621010;2.西南科技大学 制造过程测试技术教育部重点实验室,四川绵阳 621010)
无系绳软机器的发展及相关研究在科学界引起了广泛的关注。目前,作用于无系绳软机器中设计的智能材料成为重要选择对象。智能材料具有常规材料无法实现的特性和功能,感知外部刺激发生响应而产生结构和功能的转变,既满足了变形需要,又具有适应环境变化的多种功能,其自变形、自判断和自适应等特点可以实现对生物智能的人工模仿,因而在智能结构、软驱动器、软机器人、储能等方面起着重要作用[1, 2]。利用智能材料对外界某特定刺激的响应特性,实现可重构[3-7]、自组装[8-13]等方面的智能结构设计。Stoychev等[14]使用温度响应的形状记忆纤维,制作了一种具有隔热作用的智能自褶皱织物结构。Troyano等[15]利用化学蚀刻方法制造了一款智能复合膜,其表现为可调节的自折叠响应,由吸附、解吸过程引发可预测的2D到3D形状智能转换。Miskin等[16]利用石墨烯与二氧化硅制作了一款可实现自折叠的微型双晶型驱动器,它们能够感知环境而做出反应,在微米级机器人的制造设计方面具有一定的潜力。Yu教授团队[17]提出利用3D打印技术构建可编程水凝胶结构,由温度驱动产生各种复杂的三维智能结构,同时完成软体抓手的制作并实现在高温与低温环境中对货物的抓取与释放动作。Wang等[18]将CNT/PDMS层的光热特性与氧化石墨烯层天然的亲水特性结合,制作了一种由光、热、湿度控制并能产生可逆变形的软驱动器。Amjadi等[19]提出了一种可编程的聚丙烯-复印纸双层驱动器,该驱动器由电、湿度或光照驱动,可作用于软体抓手和轻型纸翼航空机器人。目前大多数基于智能材料的软体机器人也只能在周期交替变化的环境中移动,需要额外的条件刺激与过多的人工干预。Shin等[20]报告了一种具有仿生双层结构智能材料的爬行机器人,通过周期性控制湿度条件从而实现向前运动。Wang等[21]提出了一种高度可变形的液态金属复合材料,通过远程控制进行无线加热,实现了仿章鱼运动和软体机器人缠绕物体等设计行为。其中,大多数的智能材料昂贵、制造工艺复杂,并不能大规模的生产及使用,将大大限制了材料的运用。因此,成本低廉、并且适合应用于软机器方面的智能材料的研究仍需不断深入,探究具有可逆变形、多重状态变形的智能材料以适应智能构件的要求,实现更好的智能化成为发展趋势。
本文采用已工业化的硫酸纸作为驱动材料,其具有良好的湿度响应特性,并对其微观样貌、力学性能进行了表征与测试,解释了其变形机理。将其作为铰链结构,设计了一款自折叠智能机构,能够在50 s内完成从平面结构到立方体结构的转变;应用于软体驱动器方面的设计,制作了一款水下自适应软体抓手,可以直接依靠水环境驱动而不需要外接驱动设备;最后,设计了一款可在高湿度网格上实现定向运动的带式蠕动机器人,这一系列设计体现了硫酸纸在软机器中的应用,为软体智能材料的应用领域提供了新思路。
1.1 运动模式
硫酸纸对湿度敏感,较低的渗透性引发的不对称的膨胀会产生大变形[22]。硫酸纸条带试样变形机制示意图如图1所示。图1a)为条带长度方向与纤维方向夹角示意图,图1b)表示不同切割方向的条带试样在湿度条件下所产生的具有差异性的变形模型与实物展示。由于纸内部纤维吸水机制,当条带上下表面存在湿度差时,引导整个条带发生可预测的变形,通过控制纤维方向与条带长度方向夹角α,分别取α= 0、α= 45°、α= 90°时,相应得到弯曲、扭转、卷曲等运动模式。
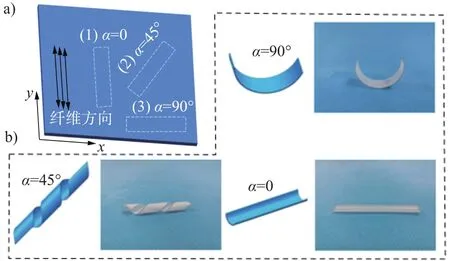
图1 条带变形机制
驱动源自于水分子在纸厚度方向缓慢的渗透形成的干/湿双层不对称结构,其弯曲曲率为
式中:ε为由干/湿层的不同溶胀引起的相对膨胀;m,n分别为干纸层和湿纸层的厚度和杨氏模量比,m=h干/h湿和n=E干/E湿。
图2为厚度方向的水梯度动力学模型示意图。随着时间的推移,厚度方向CH2O梯度趋于稳定,这种厚度方向的CH2O不对称导致了纸不对称膨胀从而形成弯曲致动。
1.2 性能表征
利用光学显微镜OLYMPUS CX31对硫酸纸微观形貌进行观察,图3为硫酸纸表面形貌的光学显微镜图像。硫酸纸表面凹凸不平,其成规律分布的纹理排布方式与纤维分布方向一致。纤维排布方向决定了变形方式,垂直纤维方向的抗弯刚度较小,易产生变形。按照纹理排布方式切割,我们能够得到预测的变形模型。
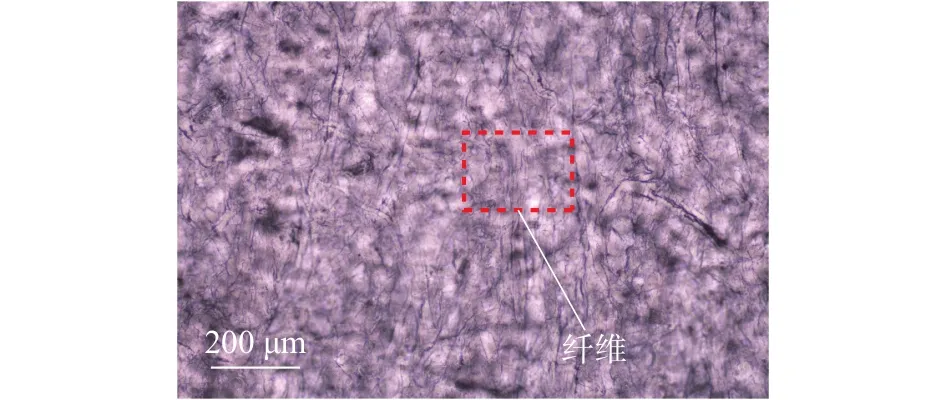
图3 硫酸纸面光学图像
1.3 拉伸试验
利用电子式万能试验机CM7-05,对硫酸纸平面两个主方向进行了拉伸试验,拉伸样件分别为α=0,α= 90°的条带,图4 所示,计算了试件的应力-应变曲线,应变由实际静止时长度计算的ε= ΔL/L,应力由作用在有效截面矩形A=dh(d为条带的宽度,h为条带的厚度)上的拉力计算,杨氏模量作为结果曲线的斜率。同时,测试了纸条带在饱和润湿的状态下的应变,计算了沿纤维垂直方向的εx= 0.105 ±0.002,沿纤维方向εy= 0.023 ± 0.002,沿厚度方向εz=0.512 ± 0.005,结果表明厚度膨胀比平面内的自吸大得多,这为纸带从平面外弯曲提供了依据,也表明了硫酸纸平面内具有各向异性。
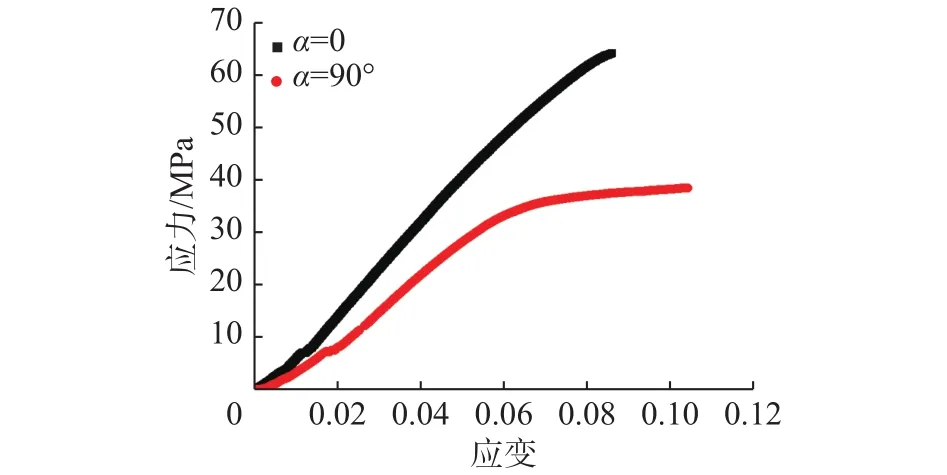
图4 应力与应变的关系
2 智能结构及其变形设计
掌握硫酸纸的变形机制,运用其运动方式于智能结构设计,为软机器的设计提供了新方法。
自折叠可自动构造任意大小的复杂几何形状,折叠结构的优势在于减少材料消耗、创建强度、重量比高的结构。因此,设计了一款内置刚性约束块的自折叠立方体,如图5所示。
图5a)为硫酸纸作为自折叠铰链的截面示意图。限制层结构与硫酸纸条带之间由双面胶带进行粘接。限制层结构的间隙可释放下层的硫酸纸条带,使其在水蒸气条件下膨胀实现智能化折叠。通过调整铰链处间隙宽度W和限制层厚度t来设计自身编程折叠的角度。取W= 2.36 mm,t= 1.5 mm,折叠角度θ为90°。间隙宽度W为

自折叠立方体铰链处扭矩T由湿应力σx、纸湿层的厚度h1以及纸干层的厚度h2和铰链的宽度d诱导激活(图5)。扭矩T为

重力产生的力矩主要是由折叠面的长度L和复合材料(限制层/硫酸纸层)的质量m所致(双面胶带质量忽略不计)。力矩M为

铰链的扭矩T以及重力矩都与铰链的宽度d成线性相关,因此自折叠面可取任意宽度值。取d=10 mm,h= 0.17 mm 时,在 56 s内,由铰链弯曲驱动其折叠成一个 10 mm × 10 mm × 10 mm 的立方体,图5d)展示了立方体平面结构在底部布满水蒸气的网面上完成自折叠的过程。同时,图5c)为立方体自折叠过程应变云图,采用ANSYS Workbench对自折叠立方体进行了单向热固耦合分析,获得了相应的应变云图。硫酸纸的湿膨胀采用热膨胀代替,在主方向(纤维垂直方向)和厚度方向定义热膨胀系数。立方体底面采用固定约束,在各限制层添加定义接触。网格采用扫掠生成立方体网格。仿真结果与实验一致。
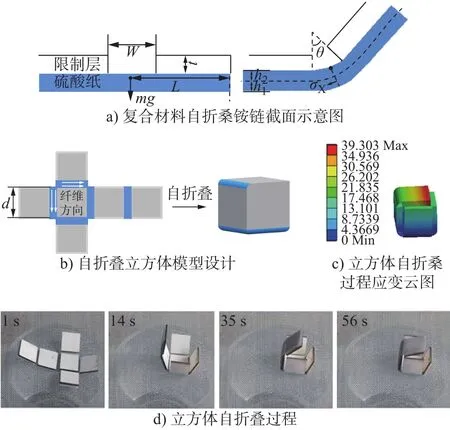
图5 自折叠立方体(标尺:1 cm)
3 软机器应用
3.1 软体抓手
灵活性和适应性对于软抓手的性能非常重要。尤其对于水下易脆、易伤物体的抓取,抓手与物体之间的安全交互尤为重要[23]。设计一款水下自适应软体抓手,可以直接依靠水环境驱动抓手而不需要外接驱动设备。考虑硫酸纸在水下抓取过程中对称吸湿至饱和,采用硫酸纸作为基底,在纸表面单侧沉积疏水Ecoflex00-30软材料。工艺简单,利用TBJRZK4900实验室涂布机可直接涂布制备,图6a)为软体抓手手爪材料制造过程示意图。使用硫酸纸(活性层)厚度为 0.15 mm,Ecoflex00-30(非活性层)厚度为0.15 mm。设计2D结构,这里仅为两张矩形条带(α= 90°)。利用激光切割获得驱动器组件,该方法使得可切割材料性能的灵活性具有通用性。
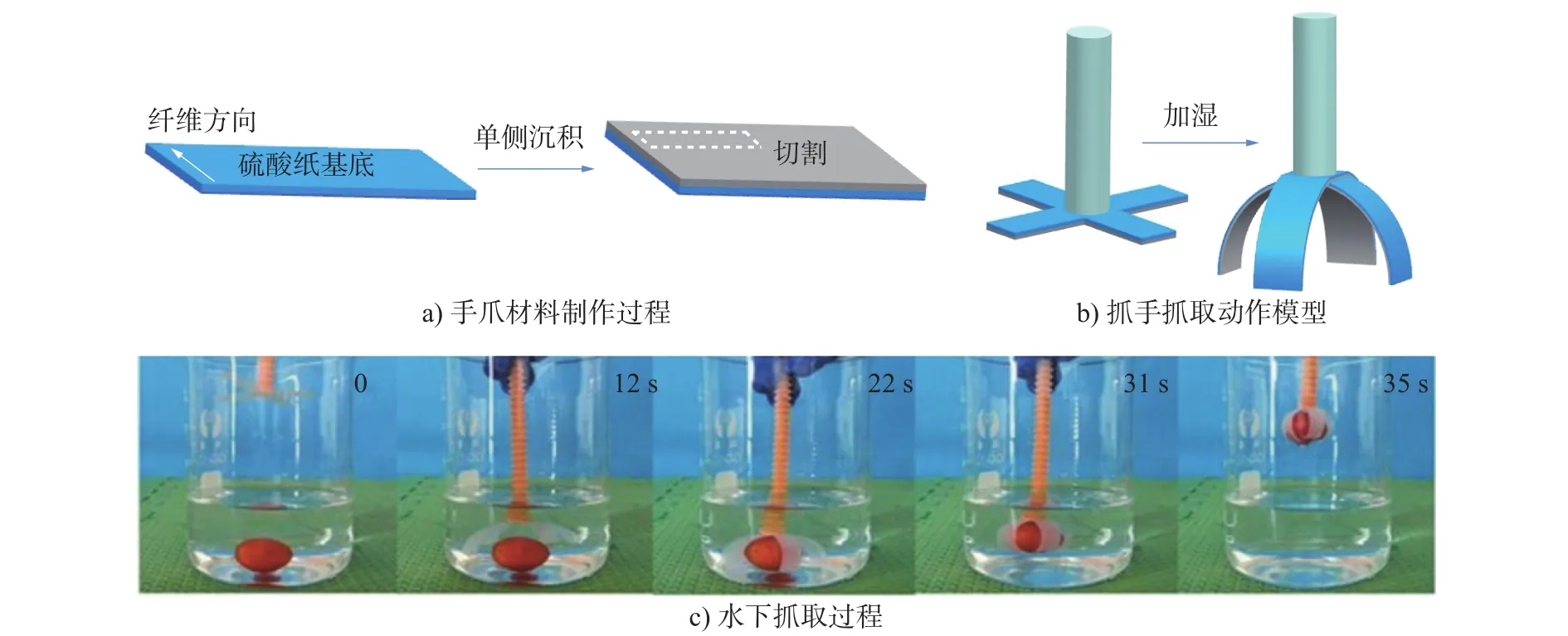
图6 水下自适应抓手(标尺:2 cm)
图6b)所示,左侧为抓手的初始状态,右侧为抓手依靠环境湿度驱动后的状态;图6c)展示了抓手在水下拾取物体的过程,这种软抓手利用了硫酸纸的吸湿性扩展功能,十字矩形条带组合可在水环境中用作机械抓手。由于其自身的柔顺性可以完成对水下各种复杂形状物体的抓握。这里,使用自适应抓手在水中夹持水果并从水中取出而未脱落。实验表明,自适应抓手最大可抓取并提升比自身重45倍的货物。此外,由于驱动器材料自身的柔性、耐酸碱性,软体抓手可以在特殊环境中(如腐蚀性溶液)实现抓取作用。
3.2 软体机器人
创造不受束缚的软体机器人成为研究热点,这种机器人可以对外部环境做出感知,处理以及适应而自动发生反复变形并能实现自我推进。为了实现这一目标,设计了一款可在稳定环境下行走的带式蠕动机器人。将硫酸纸激光切割成具有一定纵横比的条带,条带中心开设燕尾槽,并在此处采用激光雕刻减少厚度方向材料。通过卷曲与拉伸之间的周期性切换,带式蠕动机器人可在一个比周围湿度高的平面网格上移动。
图7a)所示为带式蠕动机器人的结构设计,整体条带式结构 40 mm × 18 mm × 0.11 mm (α=90°)。图7b)展示了机器人蠕动过程。纵横比过大,条带容易倾倒;纵横比过小导致条带扭转力矩不足以使条带翻转,出现左右晃动的现象。燕尾槽参数a= 1 mm,b= 3 mm,β= 30°;在燕尾槽区域采用双侧激光雕刻,雕刻深度hc= 0.015 mm。条带在雕刻区域以铰链的形式限制卷曲轴线越过中心线而引起蠕动机器人后退。当带式蠕虫机器人被放置在60 ℃热水网格面上时,带式蠕虫机器人改变自身形态向前蠕动不需要额外的条件。由于水蒸气的不均匀,机器人的第一个步态的运动方向是随机的(图7(b5)与图7(b6))。值得注意的是,后面的步态与前一个步态运动方向相同(图7(b8)与图7(b9))。这是由于转动轴两侧不对称位置改变了接受湿气的有效面积,后向上卷曲侧比先向上卷曲的有效面积更大(图7(b8)),在驱动力矩和惯性矩的作用下沿着上一个步态前进。在初始状态,考虑水蒸气的不均匀导致的扭转力矩不足以使条带翻转,引入不对称的初始条件(图7(b2)与图7(b3)):在机器人弯曲到一定阶段时,利用镊子将其翻转,恢复伸直状态时存在内应力。在实验中,机器人速度可达到每秒0.06倍体长。在将来,该机器人可以在人体皮肤上固有潮湿环境的刺激下爬行并同时执行各种生物医学治疗。
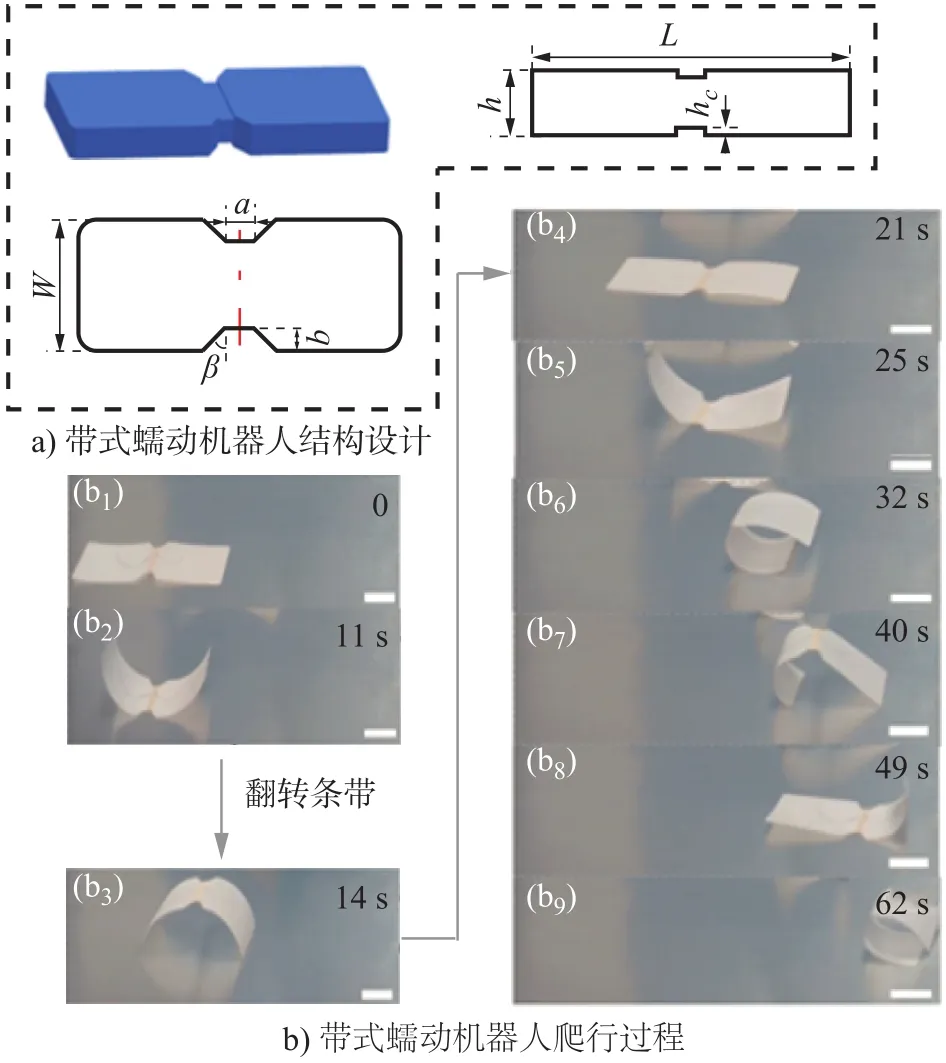
图7 带式蠕动机器人(标尺:1 cm)
4 结束语
本研究从纸平面的微观结构、力学性能等方面分析了硫酸纸的变形机理,基于硫酸纸的湿响应特性提出并实现了在软机器设计中的应用,如自折叠机构、水下自适应软体抓手、带式蠕动机器人,充分证明了该方法的可行性,该设计方案体现出的设计思想和技术方法,为新型软机器设计奠定了基础,同时也为软机器的研究提供了借鉴和参考。
