基于卷积神经网络的教室照明控制系统
2022-03-18王甜昆张克俭宋方韬于浩伟俞晓冬刘树林
王甜昆 李 政 张克俭 宋方韬 于浩伟 俞晓冬 董 霞 刘树林
(齐鲁工业大学(山东省科学院)电气工程与自动化学院 山东·济南 250353)
0 引言
传统的照明控制方式具有简单、有效、直观的优点[1-4],但这种方式过多依赖控制者,而且控制相对分散,无法有效管理,也无法实现一键智能控制,其适时性和自动化程度不高,不能满足节能的要求和社会发展,文献[5]提出了一种智能的自习室照明控制系统,该系统以单片机为核心组件,结合红外传感器和光敏电阻达到照明系统的智能控制,但是这需要大量的传感器,线路比较复杂。2005年,法国研究人员Dalal对照明系统的智能化控制检测算法开始研究,并在CVPR发表HOG+SVM行人检测算法[6],该算法计算量大,检测结果也并不理想。文献[7]提出根据形态学的方法进行人物边界提取,结合改进的边界跟踪算法实现人物头部判别,其利用了图像灰度化和二值化、图像边缘检测与跟踪等一系列处理技术,处理过程比较繁杂。
本文提出了利用卷积神经网络对大量图片进行训练和深度学习,通过训练一种端对端的目标检测模型,采用YOLOv3算法对摄像头的行人检测技术进行优化与处理,大大提高了摄像头检测和处理图像的精确度,计算量小,处理速度快,且显示界面直观清晰,为建立智能化教室照明系统提供可靠的理论与实验依据。
1 系统整体结构设计
通过调用训练好的数据集进行相似匹配,搭建卷积神经网络,调取YOLOv3算法训练的模型来对摄像头采集的人体图像进行处理与优化,增强了行人检测的识别准确度。此系统由两部分组成:上位机子系统与下位机子系统。上位机子系统负责对教室内进行实时的图像采集、处理、显示与存储,并实现分区域控制等功能。下位机子系统负责对教室的照明灯具进行控制。系统的原理是:教室内的监控摄像头实时采集图像,传输给上位机进行行人检测,上位机调用提前训练好的行人检测模型,在图像采集区域建立坐标系,利用质心追踪算法获取行人中心坐标,并将该坐标转换为物理坐标,经过处理的数据通过串口通信的方式发送给下位机,由下位机对照明灯具进行控制,技术路线如图1所示。
2 系统工作过程
本系统包括模型训练、图像采集、上位机数据处理三个工作过程。
2.1 模型训练
首先,训练一种端到端的目标检测模型,然后,利用YOLOv3卷积神经网络,对大量图片提取特征,得到特定大小的特征图输出,形成行人检测数据集。卷积神经网络具有自动提取特征、权值共享、图像输入与网络结构结合良好等优势。权值共享使得图像可以直接作为网络的输入,自动识别特征,提高图像识别的精度和效率,训练结果如图2所示。
2.2 图像处理
在图像采集环节,系统自动调取监控设备采集的视频序列,并进行每秒25帧的图像采集,采集完成之后将视频序列转换为图像帧,系统对图像帧进行空间域、图像分割以及边缘检测等预处理。图像的预处理在数字图像中占了很重要的地位,图像质量的好坏,直接影响系统的分析,图像预处理完成之后将其发送到上位机,如图3所示。
2.3 上位机数据处理
利用上位机进行可视化界面的展示和相应的数据处理。首先,对采集的图像帧进行分析,将图像坐标转换为物理坐标,如图4所示。然后把位置信息类型转换之后上传给信息处理终端,用Qt的串口通信技术与下位机(stm32单片机)进行信息交互,最后再由下位机对灯具进行控制。
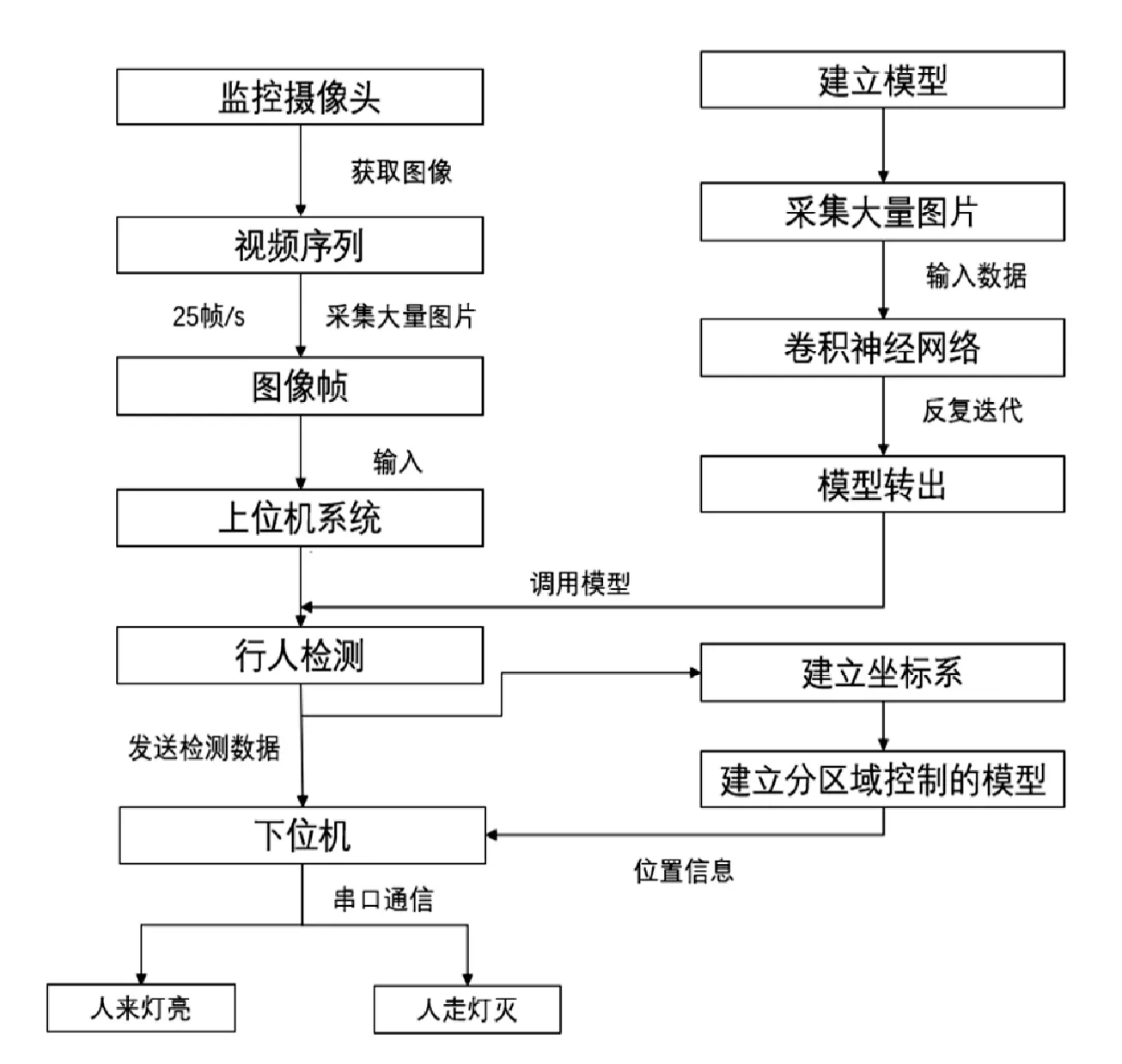
图1:技术路线图
3 技术实施
3.1 建立特定的行人检测模型
从教室监控视频中截取并保存大量的行人照片,将照片预处理之后的结果作为卷积神经网络的输入,进而训练一种端到端的目标检测模型,对大量图片提取特征,最终得到特定大小的特征图输出。输入图像分成13×13的grid cell,如果真实框中某个object的中心坐标落在某个grid cell中,就由该gridcell来预测object。每个object有固定数量的boundingbox,YOLOv3中有三个boundingbox,使用逻辑回归确定预测的bounding box,并形成最终的行人检测的训练模型。
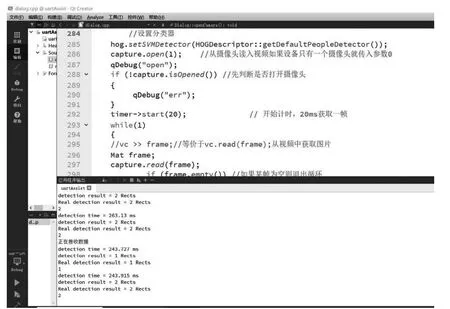
图3:图像预处理

图4:坐标转换
3.2 从监控设备中进行图像采集
在Windows下搭建Qt+OpenCV平台中,通过Open-CV中的cv::VideoWriter函数读取监控摄像头中的视频序列,并进行每秒25帧的图像采集,采集完成之后将视频序列转换为图像帧,系统对图像帧进行空间域、图像分割以及边缘检测等预处理,预处理完成之后发送到上位机。
3.3 在上位机中调用模型进行行人检测
先用特征检测器检测图像帧的行人特征,然后利用行人检测器调取训练好的行人检测模型进行特征匹配,达到行人检测的功能,再对目标进行运动追踪,并利用轮廓追踪函数给行人建立标定框,并且通过Qt采用C++编程将目标框的信息上传,与此同时发送指令给下位机。
3.4 下位机进行分区域灯光控制
通过Qt与stm32的串口通信技术,使stm32接收到上位机的行人检测目标框信息和物理坐标信息,然后自动运行提前烧录好的控制程序,在接收到数据之后,通过条件判断,做出不同的使能信号。当有人进比某一区域之后,此区域的灯具会接收到使能信号,灯具开启,当此区域的行人离开之后,灯具关闭。
4 结论
本文利用卷积神经网络,对大量图片进行特征点提取,不断进行迭代,生成特征点数据集,调用数据集可进行准确而迅速的目标追踪。在摄像头识别过程中,通过调用训练好的模型进行相似检测,可以识别复杂的人体动作轮廓,达到更好地检测行人的效果。然后在图像采集的目标区建立二维物理坐标系,将检测目标所在的图像坐标转换为物理坐标,并且利用质心追踪算法确定目标的中心坐标,然后将物理坐标系上传给上位机进行区域块的配对。最后由上位机使用Qt设计一个可视化界面,并通过串口通信技术与下位机进行信息交互,最后再由下位机对照明灯具进行控制。