大流量液压区域巡检机器人设计
2022-03-15刘宇航吕洪磊
刘宇航,王 松,吕洪磊
(中国煤炭科工集团 北京天地玛珂电液控制系统有限公司,北京 100013)
0 引言
在我国现有技术中,运行设备巡检是有效保障设备安全运行的一项必不可少的基础性工作。目前,我国工业设备的巡检方法分为人工巡检和机器人巡检。人工巡检手段以人工感觉器官观察、手持仪器测量和凭经验分析诊断为主,巡检记录则以手工记录和笔记本电脑记录为主。机器人巡检则是通过轨道导航或自动导航等方式,使机器人在巡检区域内进行移动,通过传感器、高清摄像仪等采集仪器,实现现场信息采集。然后通过无线网络通讯进行信息传递,由上位机进行数据的存储及分析。
近年来,设备的公称流量、公称压力逐步提升,设备运行的危险性也随之变大,人工巡检的方式存在安全风险高、工作强度高、工作效率低、巡检数据分散等明显弊端,一些高危、恶劣工况(例如高液压工况、强电压工况)也并不适合巡检人员进入,人工巡检的方式终将被机器人巡检所取代。
本文从实用性角度出发,介绍了一种适用于大流量液压区域的巡检机器人,主要论述了该巡检机器人的组成结构、自动导航方式、通讯方式、功能特点以及在大流量液压区域内的应用。
1 巡检机器人
1.1 巡检机器人组成
适用于大流量液压区域的巡检机器人主要由驱动系统、信息采集系统、信息处理系统、无线通讯系统和自动导航系统组成。驱动系统主要包括步进驱动器、步进电机、绝缘静音车轮和直线电机;信息采集系统主要包括温度传感器、噪声传感器、湿度传感器、振动传感器和高清摄像仪;信息处理系统包括中央处理模块、诊断模块和控制模块;无线通讯系统主要包括ZigBee模块、ZigBee协调器、5G基站和5G无线通讯模块;自动导航系统主要包括红外传感器、磁条传感器、磁条、RFID标签、RFID射频识别标签卡读写器和上位机。
1.2 上位机
上位机安装在测控中心,可通过5G无线通讯技术与巡检机器人组网,读取巡检机器人采集的实时数据、视频。也可以操作上位机软件,从而控制巡检机器人的启停、巡检路径以及高清摄像仪的位置及方向。上位机软件界面如图1所示。

图1 上位机软件界面
2 巡检机器人的功能与设计
2.1 巡检机器人设计
巡检机器人的主要功能是完成巡检任务、进行数据采集、数据传输以及故障报警。大流量液压区域实际工况噪声大、湿度高、信号干扰强(噪声干扰、其他运行设备信号干扰),对巡检机器人功能进行设计应优先选用运行稳定性高的技术。
巡检机器人外观采用流线型设计,整体结构紧凑。因其巡检工况为高湿度、高压力的大流量液压区域,所以外壳需具备良好的抗冲击性及防水性能。外壳材料选用强度高、耐腐蚀性良好、重量轻的碳纤维复合材料;壳体接缝处设有凹槽,凹槽内部安装有密封条;壳体上所有连接件、紧固件全部加装密封圈,以防液体渗入巡检机器人壳体。一些外置传感器使用透明防雾玻璃罩进行保护。
2.2 自动导航功能
2.2.1 巡检路线
在地面敷设磁条来规定巡检机器人的巡检路线。巡检机器人的中心线两侧相同位置上安装磁条传感器以实时采集路面磁条信号,采集的磁条信号经过诊断模块判断,确定小车是否偏离磁条。中央处理模块接收诊断模块信息进行处理并传递信息到控制模块,控制模块控制步进电机运转,实现巡检机器人直行或转弯。
当小车中心未偏离地面敷设磁条时,小车两侧磁条传感器采集信号相同,控制模块控制巡检机器人4个车轮的步进电机以相同的速度运转,小车直线向前运动。当小车中心偏离地面敷设磁条时,小车两侧磁条传感器采集信号出现差值,控制模块控制巡检机器人4个车轮的步进电机一侧制动,一侧正常运转,巡检机器人进行转向。自动导航系统寻迹方法如图2所示。

图2 自动导航系统寻迹方法
2.2.2 起点终点选择
地面敷设的磁条上粘贴RFID标签,而巡检机器人上安装了RFID射频识别标签卡读写器用来扫描读取RFID标签。每个RFID标签写入不同的ID号和定义,都可以作为巡检机器人巡检路线的起点或终点;RFID标签位置固定,当巡检机器人经过RFID标签时,上位机软件可以对巡检机器人进行精准定位。
2.2.3 实时定位
驱动系统中选用步距角1.8°的步进电机,步进驱动器不设置细分。步进电机旋转一周需要360°/1.8°=200个脉冲信号。由上位机统计步进电机脉冲信号数量,计算出巡检机器人实时位移量=绝缘静音车轮周长×脉冲信号数量/200,从而实现对巡检机器人实时位置的确定,并通过RFID标签定位对其进行校准。
2.3 无线通讯功能
2.3.1 设备与巡检机器人间无线通讯
本文选用成本低、运行稳定的ZigBee无线通讯技术,在运行设备上安装ZigBee无线通讯模块与设备主机或传感器连接,巡检机器人上安装ZigBee协调器、ZigBee无线通讯模块。通过ZigBee协调器进行ZigBee无线通讯模块组网,使得每个ZigBee无线通讯模块在自己信号覆盖的范围内能够与其他多个ZigBee无线通讯模块无线连接,自动中转其他ZigBee无线通讯模块传输的数据,实现每个ZigBee无线通讯模块之间相互通讯,确保设备的各项运行数据稳定传输至巡检机器人。
2.3.2 巡检机器人与上位机间无线通讯
因传输数据量大、传输距离远,为保证实现对巡检机器人的精准控制,故选用高效率、低延时、远传输的5G无线通讯技术。在巡检机器人上安装5G无线通讯模块,根据现场工况选择5G基站安装地点。5G基站提供无线覆盖,实现巡检机器人与上位机间的无线通讯:巡检机器人将采集的设备运行数据及高清摄像仪采集的高清视频传递至上位机;上位机发出信号,选择巡检机器人巡检路径及控制高清摄像仪转动。
2.4 数据诊断及故障处理功能
2.4.1 数据诊断及报警
信息采集系统中巡检机器人上安装的各传感器采集数值送至诊断模块进行判断,当各传感器采集数值正常时,巡检机器人正常运行;当有传感器采集数值异常时,巡检机器人步进电机急停,同时警报灯亮起,蜂鸣器工作。当传感器采集数值恢复正常后,经诊断模块判断,巡检机器人自动恢复运行。
2.4.2 设备故障应急处理
无线通讯系统中ZigBee无线通讯模块采集设备各项运行数据,运行数据经诊断模块判断无误后发送给中央处理模块,再由中央处理模块通过5G无线通讯模块发送至上位机软件。运行数据经诊断模块判断发现故障时,诊断模块直接通过ZigBee无线通讯模块向故障设备发送急停信号,控制设备急停,同时警报灯亮起,蜂鸣器工作。当设备恢复正常后,需重启巡检机器人。图3为故障应急处理流程。
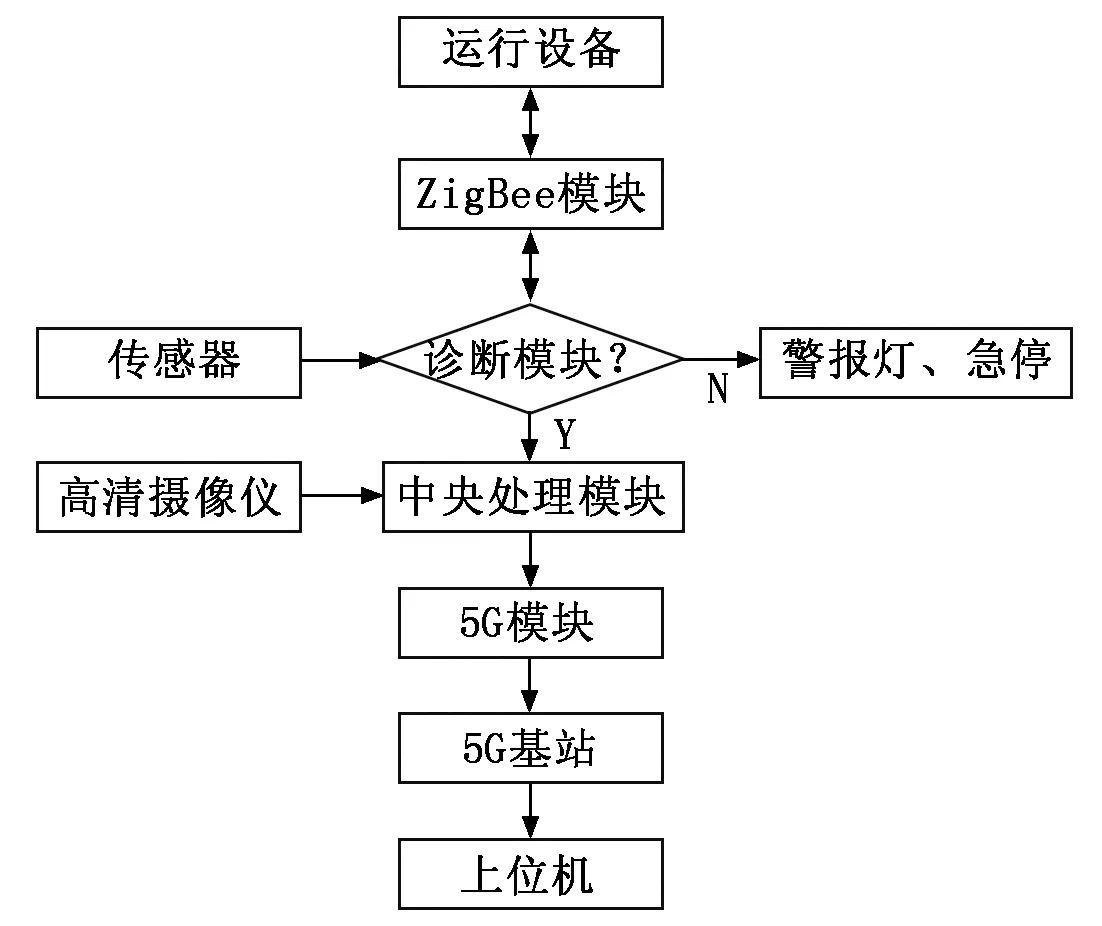
图3 故障应急处理流程
2.5 实时监控功能
摄像仪选用可360°旋转、90°俯仰且可变焦的高清摄像仪,将高清摄像仪装至巡检机器人上,操作人员根据实际观察需求,操作上位机软件发出指令,巡检机器人通过5G无线通讯模块接收指令信息,将信息传递至中央处理模块,中央处理模块向控制模块传递信息,由控制模块控制驱动系统中的直线电机运动,调节高清摄像仪的垂直高度,并控制高清摄像仪旋转、俯仰,实现360°无死角监控。
3 应用效果
巡检机器人具备高清视频传输、设备运行数据记录、故障急停等关键功能,满足大流量液压区域内巡检工作需求,既能采集工况信息,又能与运行设备数据互通采集设备运行信息,且具有运行稳定性高、可进行采集数据分析、检测故障报警并急停设备、安全可靠性高等优势,可以代替人工巡检,解决了高危工况下人工巡检危险度高的难题,同时解放了劳动力。图4为其实际应用图。

图4 实际应用
