芯片分拣机中直线电机的轨迹优化
2022-03-15王树峰孟新宇
王树峰,孟新宇
(沈阳工业大学 机械工程学院,辽宁 沈阳 110870)
0 引言
分拣机构是芯片分拣机实现芯片分拣的核心机构[1],而摆臂是分拣机构中最核心的功能零部件,最终需要通过分拣机构摆臂带动吸嘴完成芯片的转移。摆臂在直线电机驱动下快速地启停以及移动,会使摆臂产生较大的惯性振动,将直接影响芯片的拾取精度,因此需对直线电机的轨迹进行优化,以此来提高摆臂的定位精度及拾取精度。本文在建立直线电机的动力学模型之后,根据直线电机的现有参数,利用MATLAB软件求出直线电机在满载条件下的运动仿真曲线,采用五次多项式插值法对直线电机的轨迹进行优化,以达到预期的目标。
1 直线电机力学系统的计算与分析
直线电机可以看作是由旋转电机演变而来,旋转电机的定子部分转化为直线电机的初级,动子部分转为直线电机的次级,它是将电能直接转换成直线运动机械能的电力传动装置[2]。
1.1 直线电机的受力模型
本文采用水平的结构布局设计来安装直线电机[3],其受力模型如图1所示。
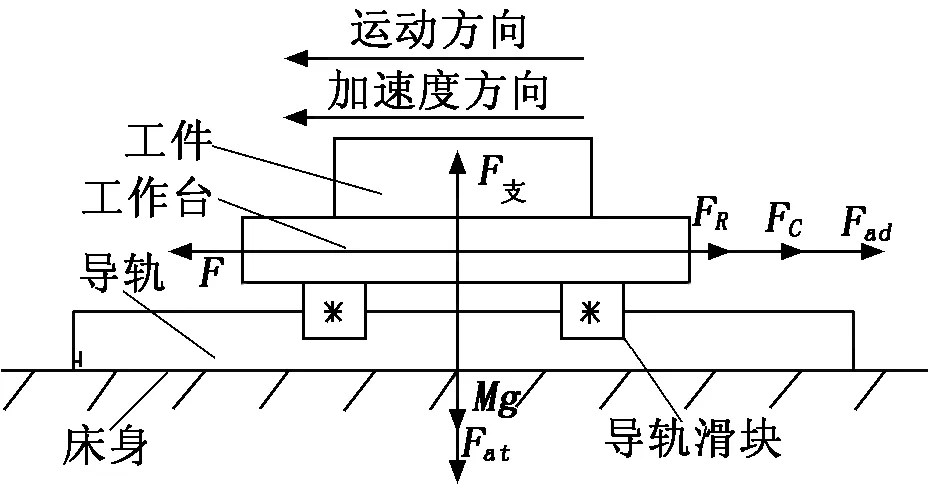
图1 水平布局直线电机进给系统受力模型
水平方向受力平衡方程为:
F=FR+Fad+FC.
(1)
其中:F为直线电机的推力,N;FR为摩擦力,N;Fad为惯性力,N;FC为切削力,N。FC可根据金属切削原理计算,更可靠的还是通过仿真和实验测得。摩擦力FR取决于导轨的摩擦因数、移动部件的总质量及定子与动子间的垂直吸引力。摩擦力FR计算公式为:
FR=μ(Mg+Fat).
(2)
其中:μ为导轨的摩擦因数;Fat为定子与动子间的垂直吸引力,N;M为移动部件的总质量,kg;g为重力加速度,m/s2。
1.2 直线电机的推动力
水平布局结构形式的直线电机,其工作台的速度曲线如图2所示。

图2 工作台运动速度-时间曲线
加速过程中的加速度和减速过程中的加速度的计算公式为:
(3)
其中:am为加速过程中的加速度,m/s2;vm为最大速度,m/s;tm为加速时间,s;dm为减速过程中的加速度,m/s2;td为减速时间,s。
移动部件的总质量可由滑动体及负载质量与线圈绕组质量之和表示:
经济全球化的背景下,发展绿色金融是顺应国际金融市场发展趋势、推动世界各国经济可持续发展的重要要求。绿色金融最突出的特点就是,它更强调人类社会的生存环境利益,它将对环境保护和对资源的有效利用程度作为计量其活动成效的标准之一,通过自身活动引导各经济主体注重自然生态平衡。它讲求金融活动与环境保护、生态平衡的协调发展,最终实现经济社会的可持续发展。
M=M1+M2.
(4)
其中:M1为滑动体及负载质量,kg;M2为线圈绕组质量,kg。
匀速运动时的推力计算公式为:
Fr=FC+μ(Mg+Fat).
(5)
其中:Fr为匀速运动时的推力,N。
加速过程中的推力及减速过程中的推力计算公式为:
(6)
其中:Fa为加速过程中的推力,N;Fd1为减速过程中的推力,N。
电机在运行过程中需满足以下技术指标,计算公式为:
(7)
其中:Fmax为电机的实际最大推力,N;Fpeak为电机的理论最大推力,N;Frms为均方根有效推力,N;Fcont为额定连续推力,N。Fmax的大小为加速过程中的推力Fa、减速过程中的推力Fd1及摩擦力FR中的最大值。均方根有效推力Frms计算公式为:
(8)
其中:tr为匀速运动时间,s;tdw为停止时间,s;t′为总时间,s。总时间t′的计算公式为:
t′=tm+tr+tdw+td.
(9)
直线电机在实际运转过程中,电机的推力会随着速度的增大而减小,其中电机的理论最大推力Fpeak、额定连续推力Fcont与速度的关系可用以下计算公式表示:
(10)
其中:v为任意时刻的速度,m/s。
本文在给定滑动体及负载质量M1、线圈绕组质量M2、水平运动距离L以及电机驱动器型号等参数下利用MATLAB软件求出直线电机在满载条件下的运动仿真曲线。
给定的具体参数如表1所示。
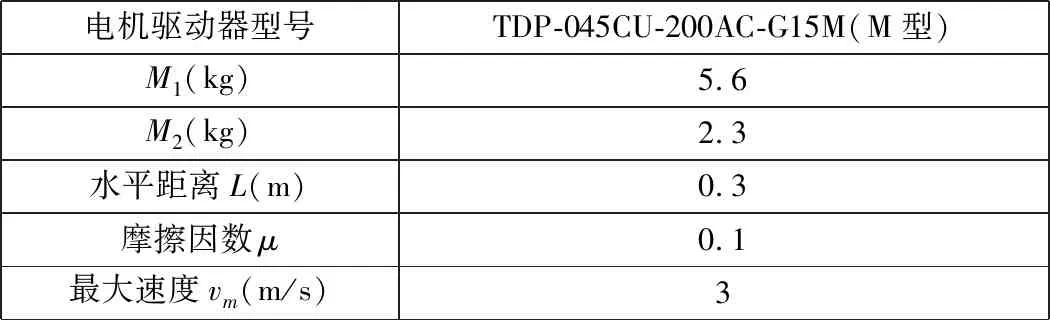
表1 给定的具体参数
利用MATLAB软件得到的位移-时间、速度-时间以及加速度-时间曲线如图3所示。

图3 直线电机运动仿真曲线
2 直线电机的轨迹优化
通过以上分析,我们从加速度-时间曲线上可以明显地看到在初始时刻加速度不为零,因此电机会受到一个较大的冲击,而在速度最大处加速度会有一个明显的反向阶跃力,这会对电机驱动的摆臂造成较大的振荡,可能会造成拾取摆臂末端的强烈振荡或拾取的芯片从吸嘴中脱落,因此需要对电机的轨迹进行优化来减少振荡冲击。
轨迹优化领域中常用的方法有多项式插值法以及样条插值法等。在实际工程应用中,为保证摆臂的高速运动和定位精度,减少系统发生振动等情况,优化生成的轨迹必须是光滑连续,其位移、速度、加速度曲线需平滑连续,因此,经常采用五次多项式插值法来保证控制系统计算性能满足要求。本文针对五次多项式插值计算情况进行分析。考虑2个数据点之间插值的情况,五次多项式插值方法的数学表达式为:
q(t)=x0+x1(t-t0)+x2(t-t0)2+x3(t-t0)3+x4(t-t0)4+x5(t-t0)5t0≤t≤t1.
(11)
其中:q(t)为任意时刻t的位置;x0,x1,…,x5为待确定的参数;t0为初始时刻,s;t1为终止时刻,s。
由于有6个待确定参数,所以需要6个约束条件,即起始点t0和终点t1的位置、速度和加速度信息,为此给定如下条件:
(12)
其中:q0为初始位置;q1为终止位置;v0为初始速度,m/s;v1为终止速度,m/s;a0为初始加速度,m/s2;a1为终止加速度,m/s2。
待确定参数x0,…,x5可通过以下计算公式得到:
(13)
其中:h和T为中间变量,其计算公式为:
(14)
对于具有n个数据点的情况,可以对所有相邻的两个点应用式(11)~式(14)得到最终的插值曲线。实验结果如图4所示。
从图4中可以看出,位移、速度、加速度三条曲线都是连续平滑的。至此,通过减小振荡,完成了目标优化。

图4 五次多项式插值结果
3 结束语
从仿真结果看,五次多项式插值法适合对直线电机的轨迹进行优化,优化后的速度和加速度曲线连续平滑,可以减小摆臂在运动过程中的振动并且提高定位精度,为下一步运动轨迹控制策略的优化奠定了基础。
