基于控制特征量响应的多端柔性直流输电线路保护
2022-03-12郑晓冬晁晨栩邰能灵杨增力
高 飘,郑晓冬,晁晨栩,邰能灵,杨增力,王 晶
(1. 电力传输与功率变换控制教育部重点实验室(上海交通大学),上海市 200240;2. 国网湖北省电力有限公司,湖北省武汉市 430077)
0 引言
模块化多电平换流器(modular multilevel converter,MMC)具有模块化程度高、无换相失败、易于实现解耦控制等优点,基于MMC 的柔性直流电网能够实现输电系统潮流的灵活控制,目前广泛应用于风电场并网、无源系统和弱电网供电以及城市供电等领域[1-4]。柔性直流输电系统阻尼小,故障后的电流上升速度快,对保护的速动性和可靠性提出了更高的要求[5]。
柔性直流输电系统的换流器是提供故障电流的激励电源,换流器的强可控性以及控制策略的多样性导致了故障特征的复杂性。换流器的快速控制特性使得换流器不能像同步机电源一样提供稳定的短路电流,进而影响继电保护动作性能[6]。柔性直流电网的保护和控制是紧密相连的,换流器的控制过程在继电保护的适应性分析中有着重要作用,可以考虑利用换流器的快速调节作用来进行故障识别和故障后的快速恢复,将直流保护和控制在同一平台实现[7]。
随着直流输电的发展,直流系统控制和保护可以在同一时间尺度内实现,控制和保护之间存在相互作用。柔性直流输电系统可控性强,基于换流器控制的故障识别与恢复可能成为今后控制与保护研究的热点。文献[8]利用闭锁电压源换流器(VSC)内部桥臂晶闸管和外加反并联晶闸管实现限流,并通过快速隔离开关与外加晶闸管的控制策略进行时序逻辑上的相互配合,实现故障隔离。该方法对换流器的控制进行了改进,需要在逆变器内额外添加晶闸管设备,且受线路长度和功率波动的影响较大,实用性有待验证。文献[9]提出通过换流器附加的控制策略,由断路器向故障线路注入特征信号来识别故障,并提出了直流的快速重启方案。该方案受采样频率以及断路器全控器件特性的影响较大。文献[10]通过切换控制方式来改变系统中换流器的调制频率,将换流器变为特征信号的注入源,利用特征信号构建保护方案。此方法主要针对直流线路极间短路故障。文献[11]提出向换流站端口注入相同频率的正弦式探测信号来识别故障类型的保护方案。此方案需要在换流器处增加额外的信号发生装置,并且由于选取特征信号的频率较小,因此在保护速动性上表现较差。
由上述分析可知,现有的对于直流控制与保护相结合的研究主要集中在对换流器的控制策略或者结构进行改变,向直流线路主动注入特征信号进行故障检测或者测距。此类方法需要产生新的脉冲或者控制信号,对控制系统的安全正常运行可能会有一定的影响,并且需要进一步研究特征信号的产生方式、注入时间、持续时间、信号波形、频率幅值以及与换流器的配合等,需要对注入信号进行精确控制,易受到外部因素的干扰,可行性有待进一步验证[6,12]。在有些情况下,还需要额外增加设备或者改变换流器的结构,使得成本提高。
本文在考虑换流器控制特性的基础上,基于控制与保护相结合的思想,提出一种利用控制特征量来识别故障的保护方案。该方案无须主动注入特征信号或改变换流器结构,不需要额外增加设备,便于控制和保护的集成设计。在换流器不同控制策略和不同的控制参数下,保护整定值能够自适应变化,获得更好的保护性能。所提保护方案根据不同故障下的控制特征信号响应,构建暂态能量判据来识别直流区内外故障,实现简单,故障检测时间快,抗干扰能力强,具备足够的灵敏性与可靠性。
1 故障后换流器控制信号响应特征
MMC 的控制结构包括内环电流控制器和外环功率控制器。内环电流控制器主要使dq轴电流快速跟踪参考值,将内部环流抑制为零。外环功率控制器将产生一个直轴电流参考值Id,ref,控制逻辑如附录A 图A1 所示。系统正常运行时,外环功率控制器特征信号Id,ref维持稳定。当系统故障时,外部电压、功率等参数的变化以及控制器自身参数调节导致控制器输出的信号Id,ref在故障后瞬间变化,不同故障类型和故障程度下控制信号会产生不同的响应特征。
1.1 定有功功率控制
1.1.1 基本控制关系如附录A 图A1 所示,在定有功功率控制的情况下,输出的控制信号表达式为:
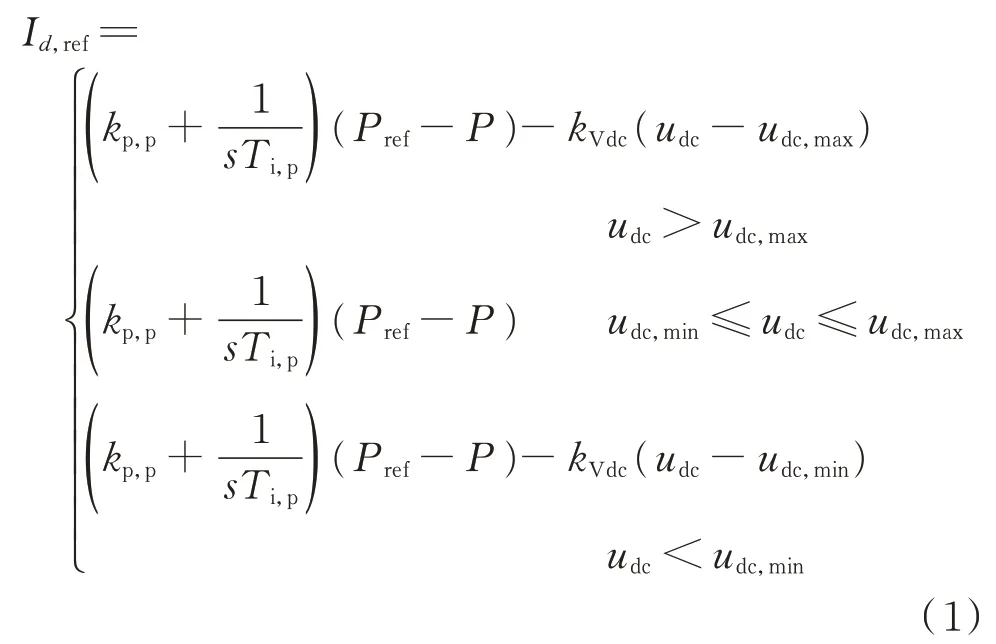
式中:kp,p、Ti,p、kVdc为控制参数;udc为直流电压;udc,max和udc,min分别为直流电压上限和下限的标幺值,分别取1.05 和0.95;P和Pref分别为有功功率的实际值和参考值。
定交流有功功率的控制中,有功功率实际值取换流器交流侧的三相电压电流数据进行计算,将功率的实际值与参考值取差值后经过比例-积分(PI)控制器输出。在直流线路故障的短时间内,换流器交流侧的电压和电流响应速度慢,波动相对较小,故障初始有功功率标幺值的波动很小。考虑定有功功率控制的换流器直流侧出口双极短路故障下的有功功率的波动如附录A 图A2 所示,在直流出口故障情况下,交流侧的功率标幺值的变化可以忽略。
直流故障的瞬间电压迅速跌落,根据上述分析,在定有功功率下直流侧故障时,式(1)可表达为:

故障后的直轴电流控制信号的变化量ΔId,ref可表示为:

式中:Δu为电压变化的标幺值。
1.1.2 直流侧区内外故障控制响应特性
在直流侧故障的初始阶段,交流侧三相系统对称,交流侧系统对直流侧故障电流没有贡献,交流侧对直流侧的影响可以忽略[13]。因此,可对故障后的电容放电回路单独分析。
中国张北四端柔性直流输电系统结构如附录A图A3 所示,线路13 区内双极故障的等效回路如附录A 图A4 所示。张北柔性直流电网设置经电抗器接入中性线,在单极接地故障的情况下,中性线上会流过故障电流。真双极结构下两极拓扑参数对称,双极短路时中性线无故障电流流通。直流中点故障的等效电路如图1 所示。图中:R0为换流器内部桥臂电阻;L0和C0分别为桥臂电感和子模块电容;N为投入的子模块数目;iM1和iM2分别为故障正极和负极的MMC 的故障电流,ΔiM1和ΔiM2分别为对应的故障后电流变化量;Ld为限流电抗器;Lg为中性点接地电感;R1和L1分别为直流侧出口到故障点的线路的电阻和电感。MMC 内部可等效为电感电容和电阻的串联电路。
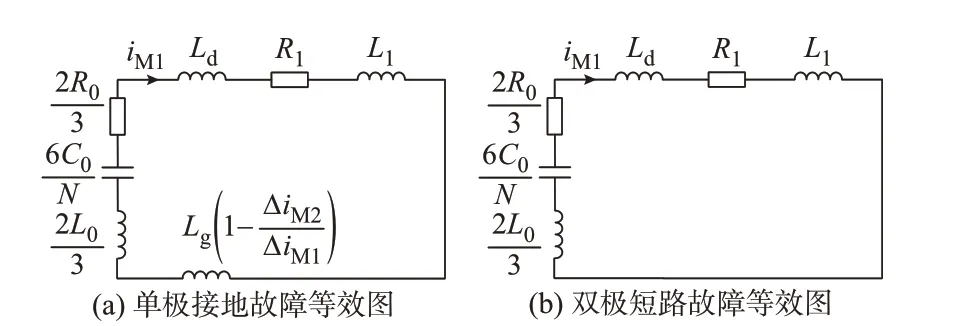
图1 区内故障等效电路图Fig.1 Equivalent circuit diagram of internal fault
故障后的电容电压不能突变,换流器直流侧出口电压的变化主要由电感电压的变化引起[14]。Δu可以表示为:

在故障后的短时间内,式(6)的衰减项对故障电流的影响基本可以忽略,不同故障下的故障电流的差异主要由故障等效电感的不同引起[16]。直流侧正向区外故障条件下,考虑控制信号能够取得的最大值,以正向区外双极故障为例进行分析,故障后的简化等效电路如图2 所示。图中:iM3为对侧MMC的故障电流。
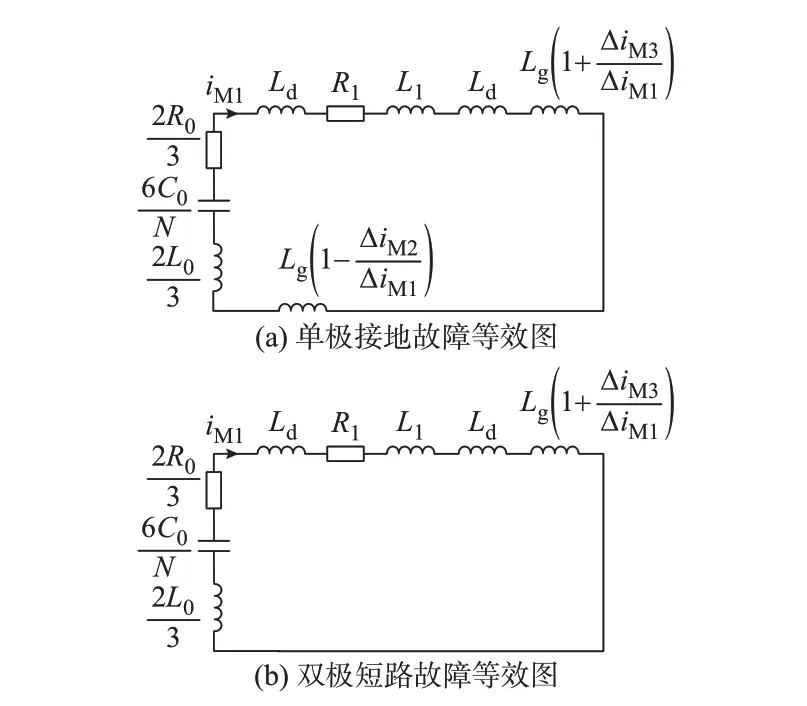
图2 正向区外故障等效电路图Fig.2 Equivalent circuit diagram of for ward external fault
由图1 和图2 可见,在同类型故障的情况下,区外故障时回路的等效电感均大于区内故障下的等效电感,区外故障时ΔiM1小于区内故障时的值。此时控制信号的积分值满足:

式中:ΔId,ref,in和ΔId,ref,ex分别为区内和区外发生同类型故障时的控制信号变化量。
由图2(b)可知,区外双极故障的情况下的等效电感Leq,ex满足:

式中:ΔiM3为对侧MMC 故障电流的变化量。
如图1(a)所示,区内正极接地故障条件下故障回路的等效电感Leq,in为:

在实际的张北柔性直流工程中,设置的接入中性线的电抗器Lg为300 mH,直流线路限流电抗器Ld为150 mH[17],因此对比式(8)和式(9),直流区内正极故障下的等效电感小于区外双极故障的等效电感。将式(8)、式(9)代入式(6)得到:

式中:ΔId,ref,sig,in和ΔId,ref,bip,ex分别为区内单极接地和区外双极短路故障时的控制信号变化量。
由式(11)可知,区内单极接地故障下的控制信号ΔId,ref的积分值大于区外双极故障的积分值。对比图1(b)和图2(a)可知,区内双极短路故障的等效电感远小于区外单极接地故障的等效电感值,因此区内双极故障下ΔId,ref的积分值远大于区外单极接地故障下的积分值。
综上所述,在定有功功率控制下,直流侧发生故障的短时间内,区内故障时的控制信号的积分值大于正向区外故障的控制信号的积分值。
1.2 定直流电压控制
如附录A 图A1 所示,在定直流电压控制的情况下,输出的控制信号的表达式为:
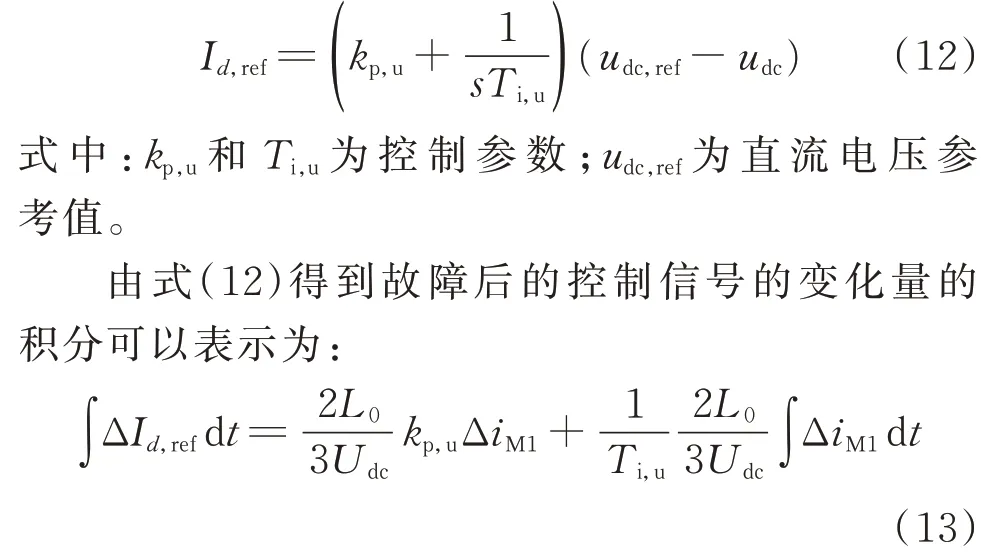
直流侧故障时,定直流电压与定有功功率控制分析类似,区内故障的控制信号变化量的积分值大于正向区外故障下的控制信号变化量的积分值。
2 保护基本原理和方案
柔性直流线路发生故障时,故障点会产生明显的电压跌落,此时故障电压变化率大,可参照常规的直流保护利用电压变化率[3]的快速启动方法。
2.1 区内外故障识别原理
四端MMC 柔性直流电网结构如附录A 图A3所示,该系统是一个±500 kV 的真双极直流电网,各换流站采用的控制模式如附录A 表A1 所示。
本节分析以MMC1 和MMC3 为例,其他换流器的分析与之类似。由第1 章分析可知,对于MMC1 而言,在直流侧发生故障的短时间内,线路12 和线路13 上故障情况下的控制信号ΔId,ref的积分值均大于线路24 和线路34 上故障的控制信号积分值。因此,可以设置阈值使得MMC1 中控制信号能够识别到线路12 和线路13 上的故障,即MMC1 的保护能识别区域1 上发生的故障。同理,在MMC3 中可通过设置控制信号暂态能量的阈值,识别到线路13 和线路34 上的故障,即附录A 图A3中区域2 的故障。基于以上原理,可以利用双端换流器的控制信号构建识别区内外故障的纵联保护。考虑到区外故障的控制信号的积分值远小于区内故障的积分值,可定义控制信号的暂态能量ΔEcon为:

式中:ΔEcon1和ΔEcon3分别为MMC1 和MMC3 的控制信号暂态能量;Eset1和Eset3分别为MMC1 和MMC3 的暂态能量整定值。
整定值的大小需要考虑躲开区外发生双极故障的最大值,并留一定的裕度。MMC1 采用定有功功率和无功功率的控制模式,根据式(5)和式(15),其控制信号暂态能量整定值应该满足:
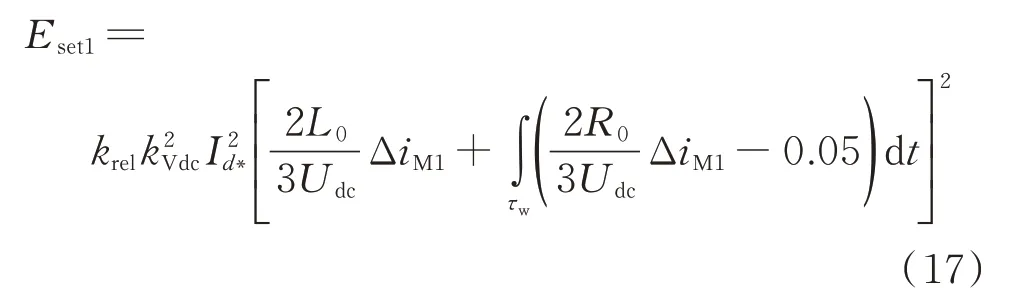
式中:krel为可靠性系数;Id∗为直轴电流基准值。
MMC1 的基本控制参数如附录A 表A2 所示,在区外近端双极故障的最不利故障情况下,故障等效网络如附录A 图A5 所示,此时可以得到故障后电流满足:
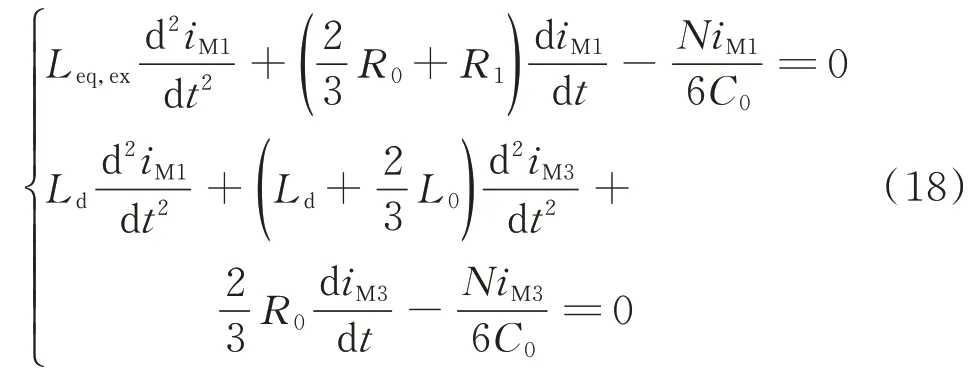
对式(18)求解得到的故障电流与仿真分析对比的结果如附录A 图A6 所示,由计算结果可知,直流侧区外双极故障后的1 ms 时间窗内,故障电流的变化量的最大值小于0.4 kA。为保障保护方案的正确动作,考虑区外近端双极短路故障并取krel=1.3,式(17)可简化为:

若存在多直流馈线的情况,故障后的等效电路如附录A 图A5 所示,可通过对回路方程的求解分析故障后的故障电流变化,用于保护整定值的计算,考虑直流区外发生最严重故障的情况,并选取可靠性系数,保障保护方案能够可靠识别故障。
MMC3 采用定直流电压和无功功率的控制模式,在对MMC3 进行整定时主要考虑直流侧正向区外故障下ΔEcon的最大值,根据式(13),其整定值应满足:
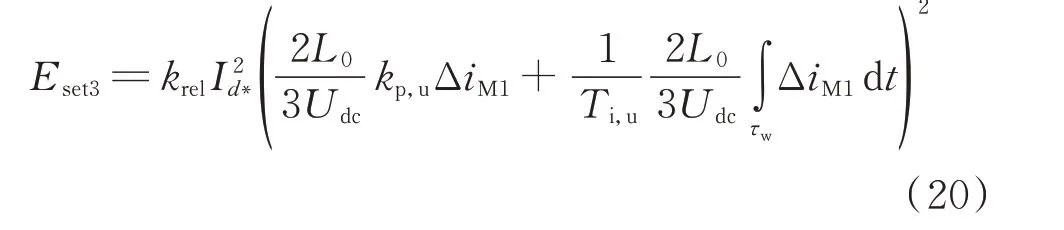
同理,可根据故障后的电流变化大小简化式(20),结果如下:

2.2 故障选极原理
真双极结构的柔性直流电网在一极发生故障时,健全极受到的影响较小,仍然能够正常工作。因此,健全极的换流器的控制信号的波动相对于故障极要小很多,故障极的控制信号暂态能量远大于健全极。双极故障时,两极对应的换流器的控制信号均会产生较大波动,由于真双极结构处于对称运行状态,此时两极的换流器的控制信号的暂态能量基本相同。因此,可以根据上述原理构建直流故障选型的判据,定义正负极控制信号的暂态能量比p为:

式中:ΔEcon,p和ΔEcon,n分别为正极和负极换流器控制信号的暂态能量。
根据上述分析,直流双极故障时p基本为1,正极故障时p远大于1,负极故障时p远小于1。设阈值pset1=2、pset2=0.5,故障选极判据可表示为:p>pset1时为正极故障;p<pset2时为负极故障;pset1≥p≥pset2时为双极故障。
2.3 保护方案
根据上述原理设计的故障识别逻辑和保护方案分别如图3 和附录A 图A7 所示。该方案采用直流电压变化率作为启动判据,并获取换流器直轴电流控制信号,利用该控制信号求取暂态能量。同时,采用换流器控制参数计算保护的整定值,将控制信号暂态能量与整定值进行比较来识别直流区内外故障,并利用正极和负极暂态能量比进行故障类型的判别。
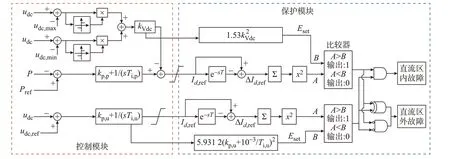
图3 故障识别逻辑图Fig.3 Logic diagram of fault identification
3 仿真验证
为验证本文所提保护的性能,在PSCAD/EMTDC 仿真软件中搭建了如附录A 图A3 所示的四端柔性直流电网模型,采样频率为20 kHz。该系统为对称双极系统,其子模块采用半桥型结构,并在线路两侧装有高压直流断路器以快速切除故障。根据式(19)和式(21)得到直流侧区内外故障识别的整定值为:Eset1=38.25 kA2⋅ms,Eset3=1 163.365 kA2⋅ms。
3.1 直流区内故障
3.1.1 正极接地故障
故障发生在t=2 s 时,当线路13 中点发生正极接地故障时,MMC1 和MMC3 故障后的仿真结果如图4 所示。正极接地故障下的暂态能量值均越过阈值,选极判据也远大于1,保护判定为正极区内故障。
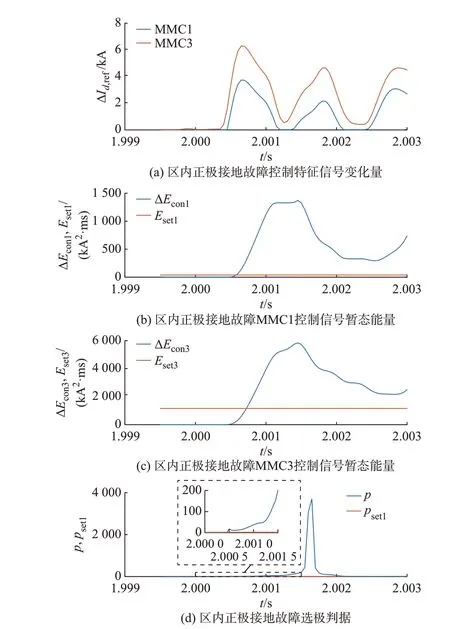
图4 区内正极接地故障仿真图Fig.4 Simulation diagrams of positive pole internal grounding fault
3.1.2 双极短路故障
当线路13 中点发生双极短路故障时,控制信号的仿真结果如图5 所示。由图5 可见,在区内双极故障的情况下,线路两侧的换流器控制信号的暂态能量均越过了整定的阈值,此时保护判定为直流侧的区内的故障。选极判据p在故障后的值基本为1,保护识别故障类型为双极故障。
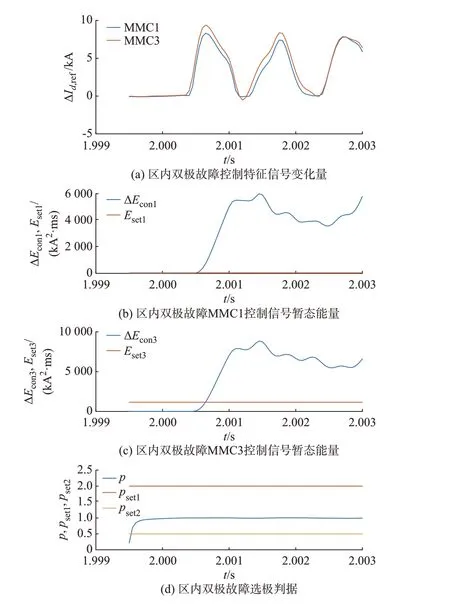
图5 区内双极短路故障仿真图Fig.5 Simulation diagrams of bipolar internal short-circuit fault
3.2 直流区外故障
如附录A 图A8 所示,正向区外发生双极故障时,MMC3 侧的ΔEcon3越过整定值,MMC1 侧的ΔEcon1未越过整定值,保护识别故障为区外故障。反向区外发生双极短路故障时,MMC1 侧的暂态能量值大于整定值,MMC3 侧的暂态能量值小于整定值,保护识别为区外故障。由于区外双极故障相较单极接地故障是更严重的故障,同条件下的单极接地故障下暂态能量值会更小,区外单极接地故障时保护不会误动作。
3.3 过渡电阻和故障距离对保护影响分析
为验证保护对不同过渡电阻和故障距离的适应性,在直流线路上设置了不同位置的故障,并验证保护在300 Ω 的过渡电阻情况下的动作正确性,仿真结果如附录A 图A9 所示。由图可见,区内单极接地和双极短路故障时,在不同的故障位置和过渡电阻的情况下,线路两侧换流器控制信号的暂态能量均大于各自的阈值,保护均识别为直流区内故障。暂态能量的值会随着过渡电阻的增大而减小,当过渡电阻为300 Ω 时,区内故障下的最小值仍然大于区外故障下的最大值,保护能够正确动作。因此,该保护具有较强的耐受过渡电阻能力。由于在整定值选取时考虑了区外故障的最大值,区内不同位置故障下的暂态能量均大于阈值,保护均能正确动作,并且均具有较高的灵敏性。
3.4 通信延时对保护影响分析
柔性直流输电系统换流站两端可采用专用光纤通道进行信号传输,光纤中信号的传输的速度大约为4.9 μs/km[18]。张北柔性直流系统中,最长线路长度约为217 km,因此两侧换流站的通信延时约为1 ms。本文所提保护采用1 ms 的时间窗,因此在考虑延时的基础上,保护动作时间也满足柔性直流输电故障检测的要求。
3.5 功率波动对保护影响分析
柔性直流系统运行方式灵活,因此有必要分析功率或潮流的变化对保护的影响。功率波动与高阻故障的特征较相似,附录A 图A10 为施加功率扰动后和直流区内正极经300 Ω 高阻故障后的换流站有功功率波动以及直流电压变化图。由图可见,施加1/3 额定功率大小的扰动后,MMC1 出口侧功率波动幅值差为600 MW,MMC3 出口侧的功率波动幅值差为1 000 MW。由于MMC3 换流站中采用了定直流电压的控制模式,在功率扰动的情况下,系统会基本维持电压的稳定,直流侧电压基本维持不变,而在高阻故障情况下直流电压变化较大。附录A 图A11 所示为加入功率扰动后的控制信号暂态能量值,由图可见,此时线路两侧换流器控制信号暂态能量值均小于整定值,保护不会误动作。主要原因是采用定有功功率策略的换流器MMC1 中存在着对功率偏差的PI 调节环节,对功率波动信号有一定的抑制作用,此时得到的控制信号变化较小;采用定直流电压控制策略的换流器MMC3 在功率波动的情况下能维持电压基本稳定。因此,根据式(2),此时换流器MMC3 内的控制信号的变化较小,所得到的控制信号暂态能量值较小,不会使保护误动。综上,本文在1/3 额定功率扰动下能够维持系统稳定,电压波动小,不会出现误动作,而对于300 Ω 过渡电阻的故障,电压波动较大,保护能够正确动作。因此,功率波动对本保护方案的影响较小,保护能够较可靠地区分功率波动和高阻故障。
3.6 交流侧故障对保护影响分析
换流器的控制策略中包含了交流侧的功率信息,因此,交流侧故障换流器的控制信号也会随之受到影响。交流侧故障不能形成类似于直流侧的放电回路,故障后短时间内电流的变化缓慢,换流器端口的电压基本不变[19]。因此,在定有功功率控制下,交流故障后短时间内的控制信号不受直流电压调节环节的影响,此时式(1)可简化为:
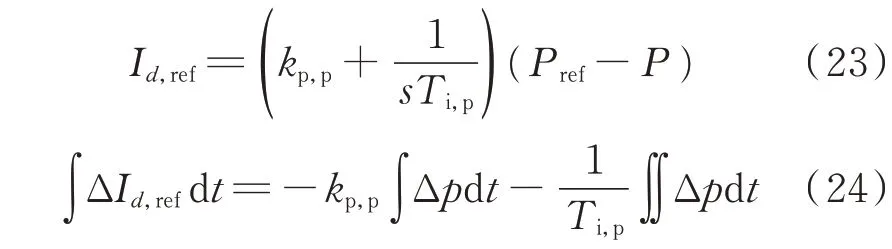
式中:Δp为有功功率的变化量。
在电网出现有功功率供需不平衡时,电网缺乏惯性和阻尼会导致换流器的控制无法像传统的同步发电机那样利用转子的转动惯量来抑制电网频率的波动[20]。因此,可利用虚拟同步发电机技术在动态情况下为电网提供相应的惯性支撑,从而改善变流器响应特性,实际的同步发电机一般为欠阻尼系统,因此在有功功率的测量环节加入一个二阶的欠阻尼系统来使换流器从运行机制上与同步发电机相似[21]。换流器模型的有功测量系统结构图如附录A图A12(a)所示,以交流侧三相故障为例,有功功率经过二阶欠阻尼系统后的变化如图A12(b)所示。由图A12 可见,在交流侧故障的初始阶段,采用虚拟同步发电机控制参与电网的动态调节能够大幅减小有功功率的跌落,有利于系统的稳定调节。根据式(24),有功功率测量值跌落小使得控制信号Id,ref的变化量小,此时线路两侧的暂态能量均小于整定值,保护不会误动作。交流侧三相短路故障时的仿真结果如附录A 图A13 所示,线路两端的换流器的ΔEcon均小于阈值,保护不会误动作。
3.7 噪声对保护影响分析
考虑到噪声可能会对保护产生一定的影响,为验证该保护的抗噪声能力,本文在换流器控制信号中加入不同信噪比的噪声来进行分析。区内正极接地故障情况下加入20 dB 噪声的仿真波形如附录A图A14(a)所示。
附录A 表A3 给出了不同信噪比下的故障仿真结果。由表A3 可知,在不同的信噪比的噪声情况下保护均不会误动作,具有较高的灵敏性。附录A图A14(b)显示在有噪声和无噪声情况下的暂态能量值相差较小,这是因为噪声为高频的正负波动信号,其期望值为零[3],暂态能量的计算采用的是积分的形式,可以在很大程度上消除噪声对于保护的影响,因此本保护具有较强的抗噪声能力。
3.8 换流器控制参数对保护影响分析
本文的保护方案利用了换流器的控制信号,并且整定值的计算与换流器的控制参数有关,因此需要研究不同的控制参数对于保护的影响。由于保护整定值需要考虑躲开最不利故障情况下的值,因此本节以区内末端的经300 Ω 的正极接地故障和区外的首端过渡电阻为0 的双极故障为例进行分析,研究保护对不同的控制参数的适应性,仿真结果如附录A 图A15 所示。
控制参数变化时,换流器的控制信号暂态能量也会变化,保护的整定值也随之变化。由附录A 图A15 可见,在不同的控制参数下,区内经300 Ω 的故障的控制信号暂态能量最小值均大于整定值,同时整定值大于区外故障的最大值,保护的整定值能随控制参数的变化而自适应变化,均能够正确、可靠动作。
4 不同方案对比分析
通过与不同保护方案的对比分析,可以验证本文所提保护的优势。
文献[22]介绍了基于极模波和地模波变化率来识别故障的ABB 行波保护原理,与本文所提保护方案的对比结果如附录A 表A4 所示。由表A4 可见,行波保护在直流正极经200 Ω 过渡电阻故障下会拒动,保护耐受过渡电阻能力差,并且由于采用极模波和地模波变化率识别故障,保护在20 dB 的噪声下会不正确动作,保护的抗噪声能力较差。由于极模波和地模波会受到功率波动的影响,因此ABB行波保护的方案受功率波动的影响较大。本文所提保护在抗噪声能力、耐受过渡电阻能力、保护动作灵敏性以及受功率波动影响程度上均优于ABB 行波保护方案。
文献[11]提出了基于主动探测式的纵联保护原理,利用MMC 的高可控性控制直流电压参考值,在换流站端口注入相同频率的正弦式故障探测信号检测故障。附录A 表A4 展示了文献[11]所提保护与本文保护方案的对比,可知文献[11]的保护方案在100 Ω 故障电阻和30 dB 的噪声下能够正确动作。本文所提保护方案在300 Ω 故障电阻和20 dB 的噪声下能够可靠识别故障并具有较好的灵敏性,耐受过渡电阻和抗噪声能力强。文献[11]中方案需要注入100 Hz 特征信号,因此保护速动性有待提升,保护动作时间在10 ms 以上。而本文所提保护方案无须注入特征信号,并且故障识别时间在3 ms 以内,满足柔性直流输电保护动作时间的要求。
文献[23]中提出了利用边界限流电抗器电压构建保护方案,采用故障后的电抗器电压大小识别故障类型,通过附录A 表A4 可知,文献[23]的保护方案在区内正极经200 Ω 过渡电阻故障下会拒动,保护耐受过渡电阻能力较差,本文所提保护方案的耐受过渡电阻能力强,并且在灵敏性上优于文献[23]提出的保护方案。
5 结语
柔性直流电网的控制和保护是密不可分的,本文分析了不同故障下的换流器控制信号的特征,提出一种基于换流器外环功率控制特性的柔性直流线路保护方案。该方案具有如下特点:
1)该方案考虑控制信号故障暂态特征,利用换流器的控制信号的快速响应能力进行故障识别,结合换流器的控制信息,无须测量线路上的电气量且无须额外增加设备,实现简单,利于保护控制的集成设计;
2)该方案能实现在换流器控制策略切换和控制参数改变情况下的自适应保护,可靠性较高;
3)该方案能在不同的故障条件下正确动作,受过渡电阻、故障距离、功率波动、交流故障以及噪声的影响较小。
本文研究需要进一步分析控制对保护的影响,在后续的研究中,需要从多方面进一步深入研究故障与控制信号的对应关系。
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
