基于动态反馈的飞行员颈腰肌多模式训练系统设计
2022-02-23张晓丽赵彦鹏卜伟平刘何庆张莉莉
苏 芳,张晓丽,单 丁,宋 维,刘 琳,赵彦鹏,卜伟平,刘何庆,吴 铨,邓 略,张莉莉*
(1.空军特色医学中心航空生理鉴定训练研究室,北京 100142;2.空军特色医学中心空天医学总体论证研究室,北京 100142;3.西安益翔航电科技有限公司,西安 710119;4.空军特色医学中心航空救生研究室,北京 100142)
0 引言
近年来,随着我军主战机型的更新换代,飞机的机动性能和作战性能大大提高。一方面,飞行员在飞行训练及空战中佩戴的装备增多,致使颈部负荷增大;另一方面,飞行过程中的高载荷导致在大机动飞行动作中,飞行员的颈、腰关节长时间受到较大负荷。脊柱周围肌群的力量对于人体承担这些负荷至关重要,飞行员需要重点在颈、腰关节的后伸、左旋转、右旋转等动作下进行专项力量训练。因此,如何在常规军事体能训练中强化飞行员的力量训练,尤其腰腹部核心力量和颈部力量训练是我军飞行员颈腰部肌肉群训练研究的重点。目前,颈功能的训练大多采用机械式抗阻训练和徒手颈肌训练模式,但缺乏颈部旋转和左右侧屈训练[1]。而腰部训练器材以健腹器和扭腰盘为主,训练过程中存在脊柱运动,影响腰背肌和腹肌的充分锻炼,因而对加强腰椎的外源性稳定、预防和治疗腰肌劳损的作用有限[2]。
大量实践结果表明,最有效的腰腹部肌肉力量训练动作应包括前屈后伸、左右侧屈、左右扭转,颈部肌肉力量训练动作应包括前屈后伸、左右侧屈、左右扭转[3]。本研究设计了一种基于动态反馈的飞行员颈腰肌多模式训练系统,能够兼顾以上各种动作的训练,还具备训练数据实时记录与反馈功能,以帮助飞行员精准掌握颈腰部肌肉训练时的自身状况。
1 系统设计
动态反馈是利用被观测信号历史数据实现的输出反馈,通过挖掘历史数据的有用信息形成的反馈法则,达到控制训练的目的。基于动态反馈的飞行员颈腰肌多模式训练系统通过记录、实时处理训练中的有用信息,形成对训练有利的相应引导,并以音频或数据的反馈形式呈现给训练者,达到提高训练效果的目的。
基于动态反馈的飞行员颈腰肌多模式训练系统整体设计框图如图1所示,主要包括砝码计数器、行程测量器、测力装置和控制器等。本系统依托的颈腰肌功能力量训练设备共有6台,分别为颈部左右旋转功能力量训练设备、颈部前屈后伸功能力量训练设备、颈部左右侧屈功能力量训练设备、腰部左右旋转功能力量训练设备、腰部前屈后伸功能力量训练设备和腰部左右侧屈功能力量训练设备,每台训练设备可实现2个训练动作,兼具等张和等长2种训练模式。
1.1 硬件设计

图1 基于动态反馈的飞行员颈腰肌多模式训练系统整体设计图
本系统中颈肌功能力量训练和腰肌功能力量训练的硬件设备设计参照相同的电气设计方案和标准[4-5]。
本系统的关键器件均采用小功率器件,总功率小于15 W。外部电源选用12 V、2 A的斩波式交流直流稳压变换器,具有可靠性高和适用性好的特点。同时配置最大输出功率为24 W的直流电源适配器。
系统内部的直流电源分配管理,是将外部电源提供的12 V直流电按照系统各个器件的需要进行转换分配。系统关键器件的电源需求分别为:串口屏采用12 V供电,最大电流350 mA;砝码计数器采用5 V供电,最大电流250 mA;行程测量器采用12 V供电,最大电流100 mA;测力装置采用12 V供电,最大电流100 mA;控制器采用3.3 V供电,最大电流300 mA[6]。为给系统预留足够的功率余量,12 V电源输入采用最大输出电流为2 A的隔离型开关电源适配器,12 V转5 V采用最大输出电流为2 A的直流斩波式开关稳压器,5 V转3.3 V采用最大输出电流为1 A的线性稳压器。
串口屏是本系统的人机交互界面,一方面用于显示系统的工作参数,另一方面用于接收用户的触摸输入,控制系统的工作状态。为确保系统的可靠性并同时满足系统功能要求,采用低温串口屏模组,可在最低温度达到-30℃的环境下正常工作[7]。
砝码计数器是用来监测训练者当前训练所用配重的器件,根据配重数量和单片配重砝码质量即可计算出训练所用总配重。鉴于人体腰部肌肉和颈部肌肉的绝对力量差异,腰部训练设备和颈部训练设备分别采用了不同的配重方案:腰部训练设备的配重砝码单片5 kg,厚度25.4 mm,每台设备20个,最大配重100 kg;颈部训练设备的配重砝码单片2.5 kg(其中首砝码采用单片5 kg),厚度16.2 mm,每台设备31个,最大配重80 kg。训练设备中的配重砝码在静止状态下是竖直堆叠的,砝码中心间距即砝码厚度。训练设备的插销根据不同需要插入不同配重砝码中心孔,在训练时插销及插销以上所有配重砝码被拉动向上运动,因此只需检测插销的位置,再根据砝码厚度即可计算出当前所用配重砝码的个数。训练设备采用的砝码计数器原理如图2所示,采用电感式金属检测元件作为基本器件(左侧圆形示意),在配重砝码堆叠方向上依次放置,其中心正对配重砝码插销,当该电感式金属检测元件检测到插销靠近时,其输出逻辑电平将会发生变化,控制器即可准确读出当前插销的位置[8]。
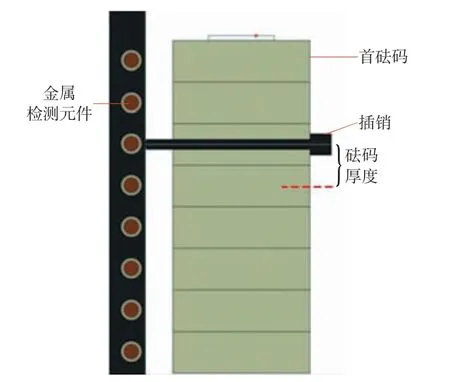
图2 砝码计数器原理示意图
行程测量器用于测量配重砝码的运动距离,与砝码数量(质量)相结合计算训练者训练时消耗的热量。行程测量是本系统设计的一个难点。常用的距离测量技术包括超声回波测量、光学飞行时间(time of flight,TOF)测量、机械拉绳测量、毫米波雷达测量等。其中,机械拉绳测量技术由于在工作过程中存在机械磨损,寿命和可靠性较低,不适合本系统。其余几种技术均为回波反射原理测距,对反射面的平整度和面积有较高的要求。而本系统的配重砝码表面凹凸不平,且反射面不够大,用反射方法难以实现精确测距。为此,采用点光源设计了激光测距模组,该模组在1 m处的光斑直径小于6 mm,测距精度达到±1 mm[9]。
测力装置采用LCP116-4kN传感器,用于测量等长训练中训练者的发力。在设计力量训练设备时,将等长训练和等张训练模式的切换插销与力传感器合二为一。在进行等张训练时,插销处于拔出状态,使用者通过肌肉发力带动配重砝码运动,从而完成等张训练;在进行等长训练时,插销处于插入状态,此时设备的训练部件被刚性固定,使用者保持固定的身体姿势,肌肉发力时训练部件不会产生位移,从而完成等长训练。
IC卡读写器用于读取IC卡中的用户信息,并存储所有相关训练数据。本系统选用13.56 MHz的S50卡作为存储介质,采用射频识别技术进行读写,具有可靠性高且容易实现的优点[10-11]。IC卡读写器通过通用异步收发传输器(universal asynchronous receiver transmitter,UART)串口与控制器通信。
控制器是实现系统功能的核心器件,协调控制串口屏显示用户操作的输入和相关信息的显示输出、采集力传感器输出、IC卡读卡和写卡、配重砝码行程测量、配重砝码计数等。除了屏幕显示,还配备了语音提示功能,增加了受训者获取信息的通道,也帮助受训者更专注地训练。本系统选用STM32F103R8T6微控制器,该控制器是一个集成片上系统,拥有丰富的外设资源,包括UART接口、模数转换接口、通用输入输出接口(general purpose input/output,GPIO)等,应用的可靠性高、可获得性强。该控制器通过定义的接口实现与其他功能单元的连接。
1.2 软件实现
基于动态反馈的飞行员颈腰肌多模式训练系统软件按照工作流程分为系统初始化、人机交互界面显示、IC卡读写、配重计算、砝码行程计算、等长训练力量读取、训练过程数据计算等模块,各模块功能相对独立。系统软件的核心算法采用C语言编写,开发工具为Keil 5 MDK,可实现代码编写和编译一体化。考虑到系统对实时性的要求并不高,因此未搭载操作系统,简化了结构,也提高了系统运行的流畅度。系统软件工作流程如图3所示。
系统初始化模块首先完成处理器GPIO管脚的定义与映射,其次对中断端口和定时器端口进行设置,然后对使用的外设和内部公共数据进行初始化,最后对触摸屏参数进行定义。
由于6台训练设备的功能参数各不相同,所以在系统初始化完成后,首先根据设备的配置文件选择启动相应设备的应用程序。IC卡读写模块进行IC卡在线周期性检测,当检测IC卡离线后,清除页面显示内容,等待IC卡再次上线。当IC卡再次上线后,读取IC卡中的训练者基本信息,同时将训练信息缓存至本地[12]。
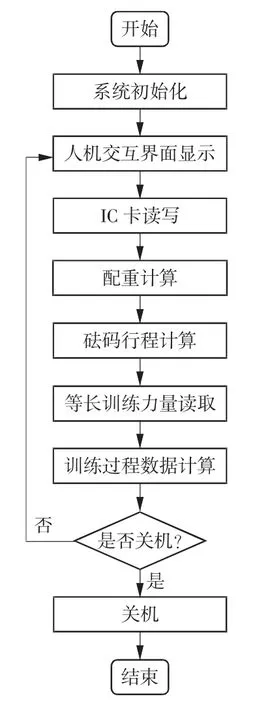
图3 基于动态反馈的飞行员颈腰肌多模式训练系统软件工作流程图
配重计算模块通过磁感应原理检测磁感应插销在静态时对应的配重位置,为避免因训练过程中砝码动态变化导致的感应错误,该模块采用与砝码行程相结合的方式判断砝码质量,采用激光测距模组测量砝码被拉起的行程,10 ms采样一次,对连续采样50次的数值采用算术平均滤波法滤波,得到的数值作为砝码行程和配置计算的输入条件。当砝码行程与行程初始误差大于10 mm时,砝码质量保持现有值不变。
训练过程数据计算模块在单次动作完成后计算单次功率、累计消耗热量、累计行程、动作总次数。同时将计算结果缓存至内存中,当训练结束后将累计后的数值发送至IC卡读写模块。
1.3 人机交互界面设计
系统人机交互界面实现页面数据显示、训练数据设定、页面切换以及语音播放功能,开机后首先进行页面元素的加载,加载完成后显示自由模式训练页面。当IC卡读写模块读取到训练者基本信息后,将信息发送至人机交互界面,人机交互界面显示训练者基本信息,并将训练过程数据实时更新显示。该界面采用Visual TFT可视化编程工具设计,快速生成以串口指令为依托的显示工程,实现核心处理器与触摸屏的交互功能。
2 系统功能
基于动态反馈的飞行员颈腰肌多模式训练系统通过训练过程的动态反馈,达到指导训练的目的。本系统的具体功能包括IC卡识别与读取、自由模式(等张)训练及显示、指导模式(等张)训练及显示、训练目标设定、等长训练力量设定与显示、训练数据存储。
(1)IC卡识别与读取:实时判断IC卡是否在线,IC卡离线时,弹出“请插卡”对话框;首次判断出IC卡在线时弹出“正在读卡”对话框,读卡完毕后对话框消失。IC卡识别与读取界面如图4所示。
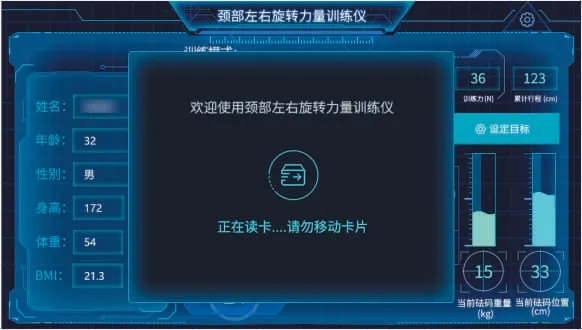
图4 IC卡识别与读取界面
(2)自由模式训练及显示:自由模式下实时显示当前砝码质量、当前砝码行程、单次动作累积次数、单次功率、消耗热量、当前训练时间、累积总次数。单次动作训练完成后提供音效反馈。自由模式界面如图5所示。

图5 自由模式界面
(3)指导模式训练及显示:指导模式下实时显示当前砝码质量、当前砝码行程、单次动作累积次数、单次功率、消耗热量、当前训练时间、目标组数和当前已完成组数、目标次数与当前次数以及休息倒计时时间。单组动作训练完成后提供音效反馈。指导模式界面如图6所示。

图6 指导模式界面
(4)等长训练力量设定与显示:等长训练开启后,训练者可设定力量值,界面实时显示训练力(如图6中右上角所示),训练力未达到设定值时有鼓励音效反馈,达到设定值后有放松音效反馈。
(5)训练目标设定:可设定能量消耗值、每组需完成次数、训练总组数、休息倒计时时间、砝码拉起有效高度,设置完成后点击“关闭”按钮,系统会自动保存设置数据。训练目标设定界面如图7所示。
(6)训练数据存储:训练完成后设备可自动将训练数据写入IC卡中,在数据写入过程中有“数据保存中”对话框和音频反馈,并可在后续训练中进行历史数据读取。训练数据存储界面如图8所示。
3 应用效果
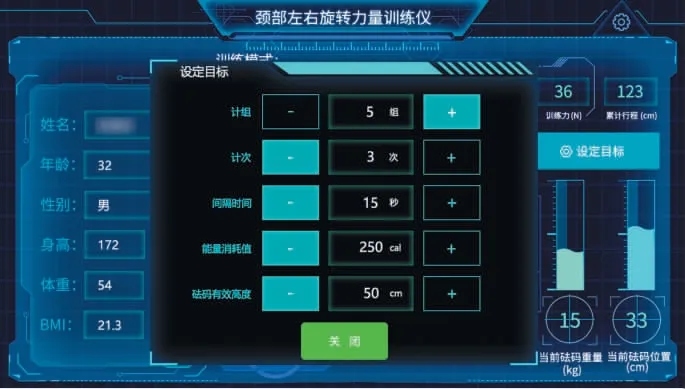
图7 训练目标设定界面
图8 训练数据存储界面
基于动态反馈的飞行员颈腰肌多模式训练系统于2020年完成了部队适应性试验验证,飞行员应用后反馈:本系统达到了原设计目标,能够为多模式下的飞行员颈腰肌训练提供动态的训练反馈信息,帮助训练者及时、准确地掌握训练状况和训练进程;系统各功能模块工作正常,能够实现训练力量、训练配重、训练次数、能量消耗及训练行程等训练过程数据的实时记录与反馈,而且人机交互界面简洁直观,整个系统使用方便、运行顺畅;系统在疗养院层面的训练环境中能够稳定工作,支持多台训练设备在不同工作模式下的同时运行。
4 结语
基于动态反馈的飞行员颈腰肌多模式训练系统可对训练中的砝码负荷、运动行程、负荷次数等数据进行实时处理,形成训练者做功、单次和累计能量消耗等反馈信息,帮助训练者掌握训练目标、把握训练进程和评估训练效果。系统累积的有效数据可形成个体训练数据档案,便于训练者了解自身状况,制订和实现训练目标,有效管理训练并调动训练的积极性。
本系统设计的配重计算模块需要与激光行程测量模块配合使用,在训练过程中由于激光测量的累积误差偶尔会导致配重计算出现偏差,所以在后续的研究中拟设计独立的配重计算模块,提升训练过程中配重计算的准确性。另外,由于时间和试用量的限制,本系统在高温、高湿及高海拔等苛刻环境下长时间应用后的稳定性、训练者大量累积数据存储功能以及系统维护和配置备件需求等问题,还需要进一步的验证。