智能人因学内涵、方法及理论框架
2022-02-19王秋惠王雅馨
王秋惠 王雅馨
摘 要:为分析第四次工业革命驱动下智能人因学的研究内涵、方法及其理论框架,采用文献调查及理论分析法,比较历次工业革命对人因学发展的影响。研究发现,相比第二、第三次工业革命期间的经验人因学、科学人因学以及现代人因学,智能人因学其研究特点、研究内容、研究方法均发生了较大变化。智能人因学属于人因工程领域的研究前沿,它以智能机器人为研究对象,以机器人人因工程、机器人人因系统、机器人人机交互、机器人人机界面、人机共融、机机共融等为主要研究内容,以提高人与智能机器人协作效率、人的健康、安全和舒适为目标,强调机器人与人的自适应人机共融自然交互为目标,研究人、智能机器人(智能机械装备)及其工作环境之间相互作用的科学。研究构建智能人因学理论框架,可以为后续基础应用研究提供参考依据。
关键词:智能人因学;机器人人因工程;人机交互;理论框架
中图分类号:TP 242;TP 272
文献标识码:A
文章编号:1672-7312(2022)01-0055-08
Abstract:In order to analyze the research connotation,methods and theoretical framework of smart humanrobot ergonomics driven by the fourth industrial revolution,this paper compares the influence of industrial revolution on the development of human factors by literature survey and theoretical analysis.It is found that,compared with the stage in empirical humanmachine ergonomics,scientific humanmachine ergonomics and modern humanmachine ergonomics during the second and third industrial revolution,its research scope and research paradigm have also changed greatly.Smart humanrobot ergonomics belong to the research frontier of humanmachine ergonomics field.It takes smart robots as the research object,humanrobot system (HRS),humanrobot ergonomic(HRE),humanrobot interaction(HRI),humanrobot interface(HRIs),humanRobot Integration (HRIg),robotrobot integration(RRIg) etc.as the main research content.It is the science that studies the interaction between human,robot (intelligent mechanical equipment) and their working environment.The goal is to emphasize the adaptive interaction between human and machine.The aim is to improve the work efficiency,human health,safety and comfort in the cooperation and integration of HumanRobot.Constructing the theoretical framework of smart humanrobot ergonomics can provide reference basis for the basic and applied research work of the humanrobot ergonomics.
Key words:smart humanrobot ergonomics;humanrobot engineering;Humancomputer interaction;theoretical framework
0 引言
从19世纪90年代初,传统人因学从早期萌芽开始,历经3个阶段(经验人因学阶段、科学人因学阶段、现代人因学阶段),发展至今已有130多年的历史。在各国学者的共同努力下,逐渐形成了较为完整的理论体系。近年来,随着智能机器人技术的突破性发展,传统人因学研究对象、研究内容、研究方法也发生了较大变化。智能机器人领域人因学相关基础应用研究,逐渐被国内外学者关注,成为学界一大热点,这正是开展智能人因学(smart humanrobot ergonomics,SHRE)研究之目的。在传统人因学领域,国内外学者积累了丰富的理论成果,如英国著名人因学专家
NEVILLE提出的人因工程研究方法[1];美国TILLMAN建立了人因工程标准[2];以及美国普渡大学DUFFY教授提出的人体数字模型构建方法等基础应用研究成果[3]。我国知名人因学专家张力、郭伏、薛澄岐、蒋祖华、饶培伦等研究团队,长期致力于核电站信息交互界面人误模式、产品可用性设计、脑神经人因学、设计人因学、老龄人因学、人机交互设计以及人机界面设计等方面的研究,带领其团队产出了具有重要理论价值与实践意义的丰硕成果,成为中国人因学界的领头羊[4-8]。上述研究成果對智能人因学理论框架的形成,具有重要的参考价值。
基于ISISCI Expanded、ScienceDirect、SAGE、ACM Digital Library、中国知网五大文献数据库,在机器人人因学(humanrobot ergonomics,HRE)研究领域,以主题词“Robot ergonomics,Robot human factors”检索筛选文献共计309篇。机器人人因学研究,最早见于1983年国际人类工效学会会刊《Ergonomics》刊登的由日本学者NORO K等发表的研究成果《Robotization and human factors,ergonomics》中,首次提出了机器人人因工程设计评价的重要性[9];之后,
SPENCER强调了人因设计对提升码垛打包机器人操作绩效的价值[10];CURRIE等建立了国际太空站机器人系统机械臂人因工程解决方案[11];RAHIMI、TAYYARI、REINERMAN、SNCHEZ等学者提出机器人交互安全性、空间布局合理性、作业姿势舒适性等方面的人因工程设计策略[12-15];CATCHPOLE、RODRIGUES以及MENDES等学者提出医生与手术辅助机器人进行人机交互时的操作方式、疲劳度、作业负荷等人因特性[16-18];NAHMAD、MATEUS等提出关键人因要素在机器人设计流程及作业空间设计评价中影响机制[19-20]。但是,上述关于机器人人因工程的研究,主要聚焦于工业机器人或医疗机器人领域。而专注于智能服务机器人人因学方面的文献成果并不丰富,已有成果主要集中于多模态人机界面技术、评价技术等方面。 国内关于此领域的研究成果则相对更少。王秋惠、王柏村等学者系统分析了老龄服务机器人、康复机器人、以及智能制造领域中,人因学基础理论研究当前所面临的挑战性问题 [21-22]。尽管学界在机器人人因学研究领域的不同侧面,产出了较多有参考价值的理论成果。但是,针对新科技时代,以智能机器人为主要研究对象的智能人因学基础理论框架尚未建成,这是亟待解决的问题。
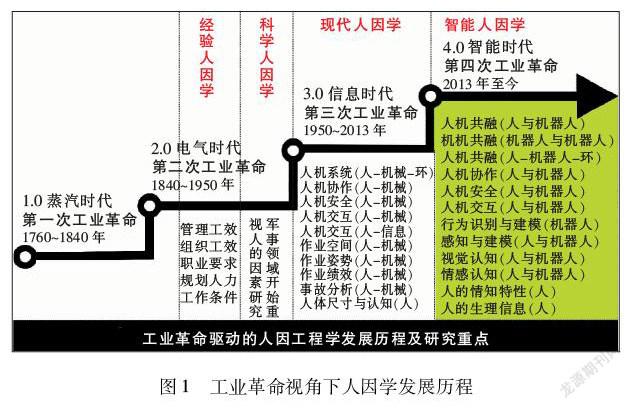
1 工业革命视角下人因学发展历程人因学的发展是伴随着历次工业革命而不断发展变化的。在第二(工业2.0)、第三次(工业3.0)工业革命期间,人因学经历了3个阶段:经验人因学阶段、科学人因学阶段、现代人因学阶段[23]。近年来,以人工智能技术为代表的第四次工业革命(工业4.0)的到来,促进了智能人因学阶段的到来,如图1所示。
1.1 第二次工业革命期间的人因学19世纪末,即第二次工业革命中期,科学管理之父、美国机械工程师E.W.泰勒(Frederick W.Taylor)建立了以提高操作绩效为目标的作业方法及作业标准,关注人在使用机器、工具、材料以及作业环境中的人机问题,机械制造业管理工效学理论体系得以初步萌芽[24],代表着人因学研究进入了初期阶段,即经验人因学阶段(1890—1939)。该阶段重点关注工程心理与应用心理学方面的研究,认为机械设计的着眼点主要在于力学、电学、热力学等工程技术方面的原理设计,其人机关系的核心理念是以培训操作者为主,使人适应于机器。经验人因学阶段的研究内容主要包括管理工效、组织工效、职业要求、人力规划、工作条件等方面。
经验人因学一直持续到第二次世界大战之前。第二次世界大战期间,由于当时军事武器与装备设计领域出现了复杂的人机问题,使欧美政府、军事界、军工界意识到“人的因素”在装备设计中的重要性。此时,人因学走向第二个阶段:科学人因学阶段。“使机器适应于人”的理念逐渐取代了经验人因学“让人适应于机器”的思想。科学人因学阶段,从二战后一直到20世纪50年代末,其研究应用逐渐由军事领域转向民用领域,工业与工程设计中的人因学成为当时研究热点,受到工程技术人员、医学家、心理学家、生理学家的广泛关注。
1.2 第三次工业革命期间的人因学20世纪60年代初,第三次工业革命爆发,正值二战后欧美各国大规模经济复苏发展期。伴随信息化技术、计算机科学、自动化和机器人等科学的发展,人因学得到了更多发展机会,开始由第二阶段转向第三个阶段:现代人因学。与前两个阶段相比,现代人因学研究重点由传统机械装备的物理介质,开始转向信息化特征的软件界面、网络界面等数字显示装备的人因工程设计、人机交互设计。该阶段着重研究以“人”为核心的作业空间安全设计、作业空间虚拟评价、作业姿势分析、人体数字模型构建、作业绩效评估、事故分析与预测、人的认知、人的行为、人机安全(人与机械)、人机交互(人与机械、计算机、信息),强调人机系统中“人”的重要性。
1.3 第四次工业革命驱动下的智能人因学2013年,德国汉诺威工业博览会上正式推出“第四代工业——Industry 4.0”战略规划,标志着21世纪以智能制造为主导的第四次工业革命爆发,自动化和信息化高度融合渗透,智能机器人、智能计算、大数据、互联网、以及生物技术等新兴科学,正以极快的速度形成巨大产业能力和市场,极大地促进了人因学的发展,标志着人因学发展到了第四阶段:智能人因学阶段。
2 智能人因学的内涵及特点
2.1 智能人因学的内涵及定义智能人因学属于人因学领域的研究前沿,是近年来伴隨着以人工智能、机器人、生物信息以及数据科学等为代表的新科技革命的爆发,而正在迅速发展起来的多学科高度融合交叉的科学。它以智能机器人为研究对象,以机器人人因系统(humanrobot system,HRS)、人因工程(humanrobot ergonomics,HRE)、人机交互(humanrobot interaction,HRI)、人机共融(humanrobot integration,HRIg)、人机协作(humanrobot cooperation,HRC)、人机安全(humanrobot Safety,HRSf)、人机界面(humanrobot interface,HRIs)、以及机机共融(robotrobot integration,RRIg)为主要研究内容,以提高人与智能机器人协作时的交互工效、人的健康、安全和舒适为目标,研究人、机器人或智能装备及其工作环境之间相互作用的科学。在传统人因学理论基础的支撑下,智能人因学又以智能科学、机器人科学、认知科学、信息科学、数据科学、计算机科学、设计科学等为依据,构建其科学理论体系。
2.2 智能人因学的研究特点与传统人因学相比,智能人因学的特点如下。1)智能人因学与传统人因学前3个历史阶段,四者在发展阶段上一脉相承,都是在历次工业革命促进下的历史产物。智能人因学,仍遵循传统人因学理念,以提升效率与安全为目标,但其人机系统(HRS)的鲁棒性要求更高。
2)在智能人因学人机系统(HRS)中,其“机”由传统人因学中的“机器或机械”转变为具有生物学特征的“智能机器人”,“人机系统(HRS)”也变为双重“人”为核心的“人-机器人系统”,更注重“智能机器人”与“人”之间的自然交互。智能机器人既可根据用户需求做出快速反应,与“人”无障碍的自然交流,又可自主学习人的视觉、听觉、触觉等感知觉特性及环境特征而做出精准决策。
3)智能人因学阶段的基础研究,更聚焦于人与智能机器人的协作共融关系,强调智能机器人适应于人的同时,也着重研究人在与智能机器人交互时的感知特性与情感偏好。在智能机器人人机关系中,人与智能机器人交互是双向的,其适应程度并非孰轻孰重。
4)智能人因学关于人的感知觉等人因特性的研究,更趋向微观层面的人体多模态信息数据的获取与处理,研究方法与研究工具也转向以智能监测与数据计算、深度学习等为主的新技术新方法。
2.3 智能人因学研究对象智能人因学是在现代传统人因学基础上发展起来的,以人与智能机器人为主要研究对象,主要涉及以下几大类别。①老龄服务机器人;②儿童益智服务机器人;③导航服务机器人;④医院智能诊疗服务机器人、手术机器人、康复机器人、智能康复器械、智能监测服务机器人;⑤智能物流托运机器人、智能仓储机器人、校园快递智能转运机器人等;⑥垃圾转运服务机器人;⑦智能消杀机器人,如医院消杀机器人等;⑧智能巡检机器人,如航海监测机器人、电力巡检机器人、海疆监测机器人等;⑨智能装备数字终端显示装置。
3 智能人因学的研究内容 智能人因学的研究内容与研究重点,逐渐由传统人因学中“人与机械设备”交互关系研究,转向“人与智能机器人”协作关系等研究。研究内容主要涉及人机共融(HRIg)、人机系统(HRS)、人机协作(HRC)、人机安全(HRSf)、人机交互(HRI)、机机共融(HRIg)、感知与建模、感知特性等。如果根据具体对象来分,主要有以下4个方面。
3.1 “人-机器人”方面的人因学研究
3.1.1 “人-机器人”人机共融(HRIg)人与机器人的人机共融研究,是智能人因学重点研究内容。“人-机器人”方面的人因学研究,主要是对人与智能机器人的人机共融交互设计支持技术的研究。人机共融技术,是指在同一空间下让机器人逐渐具备人类感知、学习、思考、自适应及决策能力。通过与人类大脑逻辑思维及应变能力的结合,使机器人充分发挥其快速、准确、耐疲劳等机械性能,使人与智能机器人能够进行深度自然交互[25]。强调的是人与机器人协作共融的安全性、自然性、无障碍性[26]。
3.1.2 “人-机器人”人机系统(HRS)智能人因学视角下的人机系统(HRS)与传统人机系统(humanmachinesystem,HMS)相比,既有联系又有区别。传统HMS研究中,“人”是指人机系统中的人,“机”为不具备智能特征的机器。而“人-机器人”形成的人机系统(HRS),着重研究具有“人”的生物学特征的“智能机器人”,如何与系统中的“人”深度融合、做出即时反应。重点研究智能机器人对人的意图识别、情感认知、视觉认知、听觉认知、触觉认知等感知觉特性。
3.1.3 “人-机器人”人机协作(HRC)人与智能机器人之间的人机协作(HRC),其基础理论与实践应用研究的重点,主要聚焦于智能机器人如何与人进行高效协作,如何根据人的意图或是人的行为反应而做出精准决策,强调人机协作安全自如,提工效,降耗能。
3.1.4 “人-机器人”人机安全(HRSf)人机安全(HRSf)是指人与智能机器人进行高效协作时的安全性,包括人的安全性、机器人的安全性、环境的安全性,人机系统的安全性等。人机安全研究是智能人因学的重要研究内容,主要关注智能机器人的理解能力、反应能力和决策能力,着重人的生理心理信息数据与智能机器人行为的耦合映射关系研究。
3.1.5 “人-机器人”人机交互(HRI)人机交互(HRI)是智能人因学的重要研究内容。相比传统人机交互(HMI)研究范畴,HRI研究更关注人与智能机器人的交互时的表征特性,包括人与机器人交互时的作业姿势;人体功能尺寸与智能机器人形态结构设计要素的关系。强调智能机器人如何与人进行自然交互以及安全交互问题等。
3.1.6 “人-机器人”人机界面(HRIs)机器人人机界面(HRIs)是人与智能机器人在人机交互(HRI)过程中,所形成物理界面和信息界面的总称,与传统意义上人与机器交互产生的人機界面(HMI)及人与计算机交互产生的人机界面(humancomputer interface,HCI)概念,既有联系又有区别。机器人人机界面(HRIs)是HMI和HCI领域的一个分支,HMI强调的是人与机器交互作业时产生的界面,HCI强调的是人与计算机交互作业时产生的界面。HRIs不仅具有人与机器(计算机)交互所呈现的界面特征,还具备人与机器人交互作业时所具有的属性,相对传统人机界面(HMI)或HCI,智能机器人(HRIs)更关注用户与服务机器人交互的安全性、效能以及界面体验的友好性[27]。
3.2 “机器人-机器人”方面的人因学研究机器人与机器人之间的机-机共融(robotrobotintegration,RRIg)是未来智能机器人重点发展方向,也是智能人因学的重要研究内容之一。如何让智能机器人具有人类或者生物学特征,使智能机器人与智能机器人相互之间具备理解意图,交流自如,协作自如的能力,实现机器人与机器人之间的机机共融是“机器人-机器人”人因学重要研究内容。
3.3 “机器人-环境”方面的人因学研究 智能人因学阶段“机器人-环境系统”(robotenvironment system,RES),是指智能机器人与环境交互形成的机-环系统。RES主要研究内容包括智能机器人对所处环境信息的智能监测、感知、获取、特征识别、响应决策。与大部分处于单一环境重复工作的工业机器人相比,智能机器人具有感知、理解和快速响应未知环境的能力,面对复杂动态环境可自主规划路线且保持正常运行,如无人机避障、无人自动驾驶、以及仓储物流自动驾驶等机器人。
3.4 人体数据智能监测与信息特性研究智能人因学关于人的特性研究,主要着眼于智能机器人对人的心理特性和生理特性的智能监测与识别,借助于智能传感技术,以获取人的健康信息为目的。在心理方面,主要研究人的视觉认知特性、情感认知特性、听觉认知特性、触觉认知特性;在生理方面,主要研究人身体多维尺寸数据、身体部件及身体器官3D数据、日常及异常状态下人的行为、作业姿势、肌电信号、脑电信号、皮电信号、数字人体模型参数等表征数据等。
4 智能人因学的研究方法智能人因学阶段,以智能传感智能监测、虚拟现实模拟、仿真计算建模等方法,逐漸取代传统人因学定性研究法,大大提高了研究结果的可靠性。
4.1 智能传感监测实验法智能传感监测实验研究方法,主要有眼动实验、脑电实验、力反馈实验、情绪实验、心电实验、肌电及皮电实验、虚拟现实、虚拟仿真、激光三维快速扫描、视觉传感监测、听觉传感监测、声音传感监测、触觉传感监测以及生物力学模型等方法。
4.2 智能虚拟现实模拟法虚拟现实模拟法是智能人因学的重要研究方法之一。它是计算机技术发展到一定水平与思维科学相结合的产物。虚拟现实技术的出现为人类认识世界开辟了一条新途径,作为一项尖端科技,虚拟现实集成了计算机图形技术、计算机仿真技术、人工智能、传感技术、显示技术、网络并行处理等技术的最新发展成果,是一种由计算机生成的高技术模拟系统。由于虚拟现实技术的实时三维空间表现能力、人机交互式的操作环境以及给人带来的身临其境的感受,为智能人因学的发展提供了支撑,如桌面CAD虚拟现实系统。利用Open GL、DirectDraw等三维图形绘制技术对虚拟世界进行建模,通过计算机的显示器进行观察。
4.3 计算机数值仿真法计算机数值仿真法,是指在计算机上利用系统的数学模型进行仿真性实验研究方法。人因学研究常用的计算机数值仿真建模软件工具主要有AnyBody生物力学及步态分析系统、ProE计算机辅助制造平台中的Mankind人机分析模块、以及作业姿势评估软件Jack等。其中,AnyBody人体建模仿真系统是计算机辅助人因学研究和生物力学分析软件,主要用于计算人体对于环境的生物力学响应程度,为人因学产品性能改进和生物医学工程研究,提供了一个新颖的平台,可以通过导入完整的人体肌肉骨骼模型,用于人因工程设计。
4.4 行为智能观察分析法观察分析法,人因学领域常见的研究方法,指有一定经验的人通过对特定事件直接地观察,对其进行详尽的阐述记录,并在此基础上对此事件的关键因素进行分析。评估人员对设备进行现场技术的检验和观察,综合设备的使用时间,实际技术状况,负荷程度,制造质量等经济技术参数,综合分析估测设备的成新率。近年来,随着人工智能技术、计算机科学和数据科学的发展,智能数字化行为观察系统成为智能人因学研究主要方法之一。如荷兰NOLDUS公司Observer XT行为观察分析系统是研究人类行为的标准工具,可用来记录分析被研究对象的动作、姿势、运动、位置、表情、情绪、社会交往,人机交互等各种活动;记录被研究对象各种行为发生的时刻、发生的次数和持续的时间,进行统计处理,得到分析报告,可广泛应用于心理学、人因工程、产品可用性测试、人机交互等领域的实验研究。
4.5 数据信息处理与算法智能人因学研究中,人体信息数据挖掘、机器人行为分析预测、HRIs人机界面设计决策、以及理论优化模型构建等工作,主要采用机器学习与深度学习算法,如卷积神经网络、支持向量机、贝叶斯分类、决策树、随机森林以及隐马尔可夫模型等,利用这些方法有效解决机器人与人交互设计决策及理论优化问题。
5 智能人因学理论框架与研究路径势
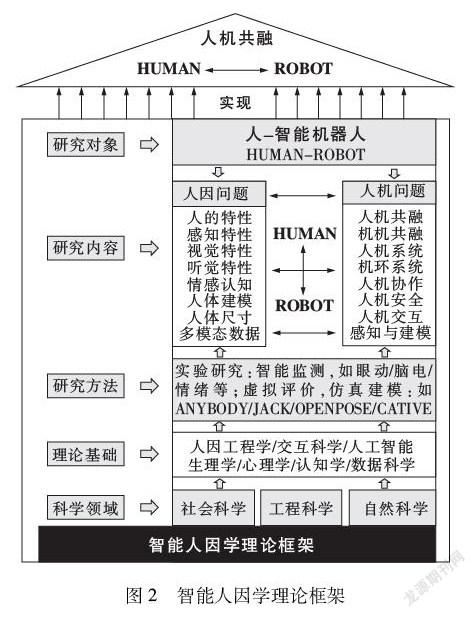
5.1 智能人因学理论框架构建据上述分析,智能人因学理论框架,如图2所示,自下而上,拟从科学领域、理论基础、研究方法、研究内容、研究对象、研究目标6个角度构建。
智能人因学属于社会科学、工程科学与自然科学高度交叉领域,理论基础则来自人因工程学、交互科学、人工智能、心理学、生理学、认知科学与数据科学等相关学科。研究方法以智能监测实验法、虚拟现实、数值仿真以及先进计算等方法。研究内容主要分为人因问题与人机问题两大层面。人因问题的研究,重点关注人的感知觉特性(视觉特性、听觉特性、情感认知特性)、人体建
模、人体尺寸等生理与心理数据信息等内容。而
人机问题研究,则是着重人机交互关系的研究,主要包含人机共融、人机系统、人机协作、人机安全、人机交互、人机界面、机环系统、机机共融、机器人行为识别与建模等方面内容。
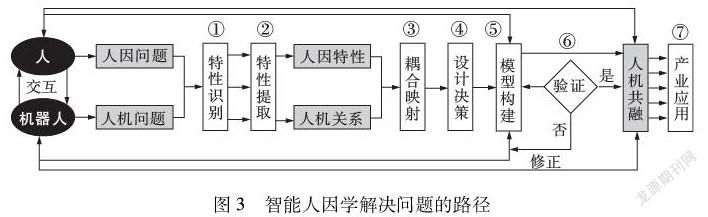
5.2 智能人因学解决问题的路径智能人因学主要研究人与智能机器人进行交互时,其人因问题与人机问题的映射耦合关系,最终实现人机共融,促进设计质量提升。其基础理论研究所解决问题的路径主要分为7大步骤,如图3所示。步骤一:人因问题与人机问题特征识别。步骤二:人因特性与人机关系的聚类分析及特征提取。步骤三:人因特性与人机问题的耦合映射关系建模。
步骤四:根据前述研究结果及理论依据进行设计决策。步骤五:构建智能人因系统、人机界面、人因安全等理论优化模型,实现人机共融。步骤六:人因特性与人机关系理论优化模型的验证。步骤七:基础理论成果的产业应用。
5.3 当前挑战及未来发展趋势由于智能人因学是传统人因学发展到智能时代的新产物,还未形成系统完整的理论体系,当前正面临着三大挑战。1)如何利用智能监测等新兴技术技术获得不同群体用户更为精准的多模态人体数据,建立更加微观、更加系统的人体生理信息与心理信息特征数据集,以支撑构建鲁棒性智能机器人HRS人机系统设计。2)智能机器人尤其是服务型机器人,如何正确理解人的意图与行为,做出可靠决策,优化人机系统结构,建立更为自然的交互模式,实现人机共融。3)尽管国际标准ISO-15066制定了某些机器人领域的技术指南,但是系统性的智能人因学行业标准尚未建立,这是智能人因学实践应用的航标性纲领,必须予以高度重视。上述挑战性问题的解决,便是智能人因学基础与应用研究未来发展目标。
6 结论梳理第二、第三次工业革命对人因学前3个历史阶段(经验人因学、科学人因学、现代人因学)理论体系形成及发展历程,分析了第四次工业革命推动下智能人因学产生的背景、特点以及与传统人因学的区别与联系。基于传统人因学理论基础,综合新科学技术,构建智能人因学理论框架。提出了智能人因学内涵定义、研究对象、研究内容、研究方法以及解决问题的路径。重点分析了人与智能机器人交互时人机共融、机机共融、人机系统、机环系统、人机协作、人机安全、人机交互、人机界面以及人体数据智能监测、获取及信息特性等内容方向,可以为智能人因学后续理论研究范式提供参考。
参考文献:
[1] NEVILLE S A.Human factors methods:A practical guide for engineering and design[M].London:CRC Press,2005.
[2]TILLMAN,BARRY,PICKETT,et al.Human factors engineering standards at NASA[J].Human Factors and Ergonomics Society Annual Meeting,2008,52(24):1999-2002.
[3]DUFFY,VINCENT G.Handbook of digital human modeling:Research for applied ergonomics and human factors engineering[M].London:CRC Press,2009.
[4]張力,王春波,邹衍华,等.核电厂安全相关人员行为确定论筛选方法研究[J].安全与环境学报,2018,18(05):1854-1858.
[5]郭伏,李明明,胡名彩,等.基于眼动和脑电技术的机器人情绪行为对用户交互情感的影响研究[J].人类工效学,2018,24(02):1-7+21.
[6]吴晓莉,薛澄岐,GEDEON T,等.数字化监控任务界面中信息特征的视觉搜索实验[J].东南大学学报(自然科学版),2018,48(05):807-814.
[7]蒋祖华,张梦航,朱洪渊.基于仿真的不同经验驾驶人跟车驾驶研究[J].人类工效学,2015,21(03):45-49.
[8]饶培伦,郭枝.高品质城镇空间设计的人因——以人为中心的设计[J].世界建筑,2021,42(03):16-18+125.
[9]NORO K,OKADA Y.Robotization and human factors[J].Ergonomics,1983,26(10):985-1000.
[10]SPENCER R.Higher labor costs,ergonomics driving robotic packaging and palletizing[J].Robotics World,2002,20(08):14-15.
[11]CURRIE N J,PEACOCK B.International space station robotic systems operations:A human factors perspective[J].Proceedings of the Human Factors and Ergonomics Society Annual Meeting,2002,46(01):26-30.
[12]RAHIMI M.Design of automated hybrid work stations:An evaluation of robot sensory systems for safety[J].International Journal of Industrial Ergonomics,1987,1(04):293-303.
[13]TAYYARI F,PARSAEI H R.Robotic system safety[J].International Journal of Industrial Ergonomics,1991,7(02):175-179.
[14]REINERMAN J L,BARBER D J,SZALMA J L,et al.Human interaction with robotic systems:performance and workload evaluations[J].Ergonomics,2017,60(10):1351-1368.
[15]SNCHEZMARGALLO,F M,SNCHEZMARGALLO J A.Assessment of postural ergonomics and surgical performance in laparoendoscopic singlesite surgery using a handheld robotic device[J].Surgical innovation,2018,25(03):208-217.
[16]CATCHPOLE K,BISANTZ A,HALLBECK S,et al.Human factors in robotic assisted surgery:Lessons from studies“in the Wild”[J].Applied Ergonomics,2019,95(03):270-276.
[17]RODRIGUES A P,HUANG C K, CARLSON T.et al. Ergonomics analysis for subjective and objective fatigue between laparoscopic and robotic surgical skills practice among surgeons[J].Surgical Innovation,2019,27(01):81-87.
[18]MENDES V,BRUYERE F.Experience implication in subjective surgical ergonomics comparison between laparoscopic and robotassisted surgeries[J].Journal of Robotic Surgery,2020,14(01):115-121.
[19]NAHMAD V A,WASSIM J.Robotic assisted design workflows:A study of key human factors influencing team fluency in humanrobot collaborative design processes[J].Architectural Science Review,2019,62(05):409-423.
[20]MATEUS J,CLAEYS D,LIMRE V,et al.Ergonomic and performance factors for Humanrobot collaborative workplace design and evaluation[J].IFACPapers On Line,2019,52(13):2550-2555.
[21]王秋惠,魏玉坤,劉力蒙.康复机器人研究与应用进展[J].包装工程,2018,39(18):83-89.
[22]王柏村,黄思翰,易兵,等.面向智能制造的人因工程研究与发展[J].机械工程学报,2020,56(16):240-253.
[23]丁玉兰.人机工程学(第5版)[M].北京:北京理工大学出版社,2017.
[24]COPLEY F B,FREDERICK W T.Father of scientific management[M].New York:Taylor Society,1923.
[25]BHANDARI U,CHANG K,NEBEN T.Understanding the impact of perceived visual aesthetics on user evaluations:An emotional perspective[J].Information & Management,2019,56(01):85-93.
[26]贾计东,张明路.人机安全交互技术研究进展及发展趋势[J].机械工程学报,2020,56(03):16-30.
[27]王秋惠,张一凡,刘力蒙.老龄服务机器人人机界面设计研究进展[J].机械设计,2018,35(09):105-113.
(责任编辑:张 江)
