基于LabVIEW的四旋翼飞行器姿态监测系统设计
2022-02-16谢檬,南洋
谢 檬,南 洋
(西安交通大学城市学院,西安 710018)
0 引言
1901年,Breguet兄弟开始研发“旋翼机1号”四旋翼飞行器[1-3]。“旋翼机1号”采用四根钢管组成的“十字架”形状结构,于1907年的年底,首次实现四旋翼飞行器载人升空,这一突破性的进展极大促进了四旋翼飞行器的发展[4-9]。而后几十年,德国公司研发的MD4型号四旋翼飞行器、美国斯坦福大学研发出STARMAC四旋翼飞行器、法国派诺特公司研制的AR.Drone四旋翼飞行器、奥克兰大学推出带有飞控系统的四旋翼飞行器、我国的“大疆”公司和“零度智控”公司推出的ZERO1600系列无人机在民用无人机领域得到了推广[10-14]。世界各国无一不把四旋翼飞行器列为重点研究对象。

图1 监测系统结构框图
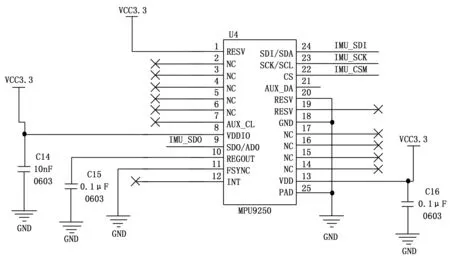
图2 传感器驱动电路图
四旋翼飞行器可以实现各种方位和角度的飞行、且能对目标区域进行远距离的实时低空侦察和观测,同时向地面监测站传送实施的影像信息;得益于四旋翼飞行器多种灵活的飞行姿态[15]。在现代战争中,四旋翼飞行器可以携带现代武器,比如远程操控投放炸弹等等[16-19]。在民用方面,四旋翼飞行器可以执行各种复杂环境的任务,比如环境监测,大气监测,地貌监测,森林防火等。控制系统是四旋翼飞行器的核心技术,主要在飞行过程中操控着四旋翼飞行器的飞行姿态、实时通信和位置导航等任务[20]。
四旋翼无人机主要由飞控手目视操控飞行过程,难免存在人为误差,为了减少飞控手目视检查所产生的误差,可以通过LabVIEW平台进行四旋翼飞行器飞行控制模拟及仿真,在软件平台上实现四旋翼飞行器飞行状态信息的实时采集和性能评估。本文所设计的四旋翼飞行器姿态监测系统,下位机采用STM32F103RBT6单片机和MPU-9250九轴传感器采集四旋翼飞行器的实时飞行高度、飞行速度、俯仰角和滚转角,将采集到的数据通过WiFi传输给上位机,上位机界面对采集的数据进行显示、记录、存储、报警和回放等功能。打开子面板,可以查询历史数据,且对其数据进行误差分析。
1 总体方案设计
四旋翼飞行器姿态监测系统结构框图如图1所示,姿态监测的四个参数分别是:飞行高度、飞行速度、俯仰角和滚转角。
MPU-9250九轴传感器将采集到的参数传输给STM32F103RBT6单片机进行处理,WIFI通信模块连接上位机LabVIEW监测平台,完成实时数据显示、历史数据查询和阈值触发报警等功能。
1.1 MPU-9250传感器驱动电路
MPU-9250传感器采用SPI通信方式和STM32单片机进行通信,驱动电路图如图2所示。在STM32单片机中将PA1管脚配置成SPI1_SCK,将PA6配置成SPI1_MOSI,将PA7配置成SPI1_MISO,PA2管脚配置成片选管脚来选中MPU-9250传感器。
1.2 STM32F103RBT6单片机最小系统
单片机最小系统包括电源电路、时钟电路、复位电路和启动电路。
1.2.1 电源电路
供电电路图3所示,电源供电部分采用3.7 V锂电池进行供电,由于MCU和MPU九轴传感器为3.3 V供电,所以电源电路中采取SP6205将3.7 V电压输入进行降压至3.3 V给其供电。
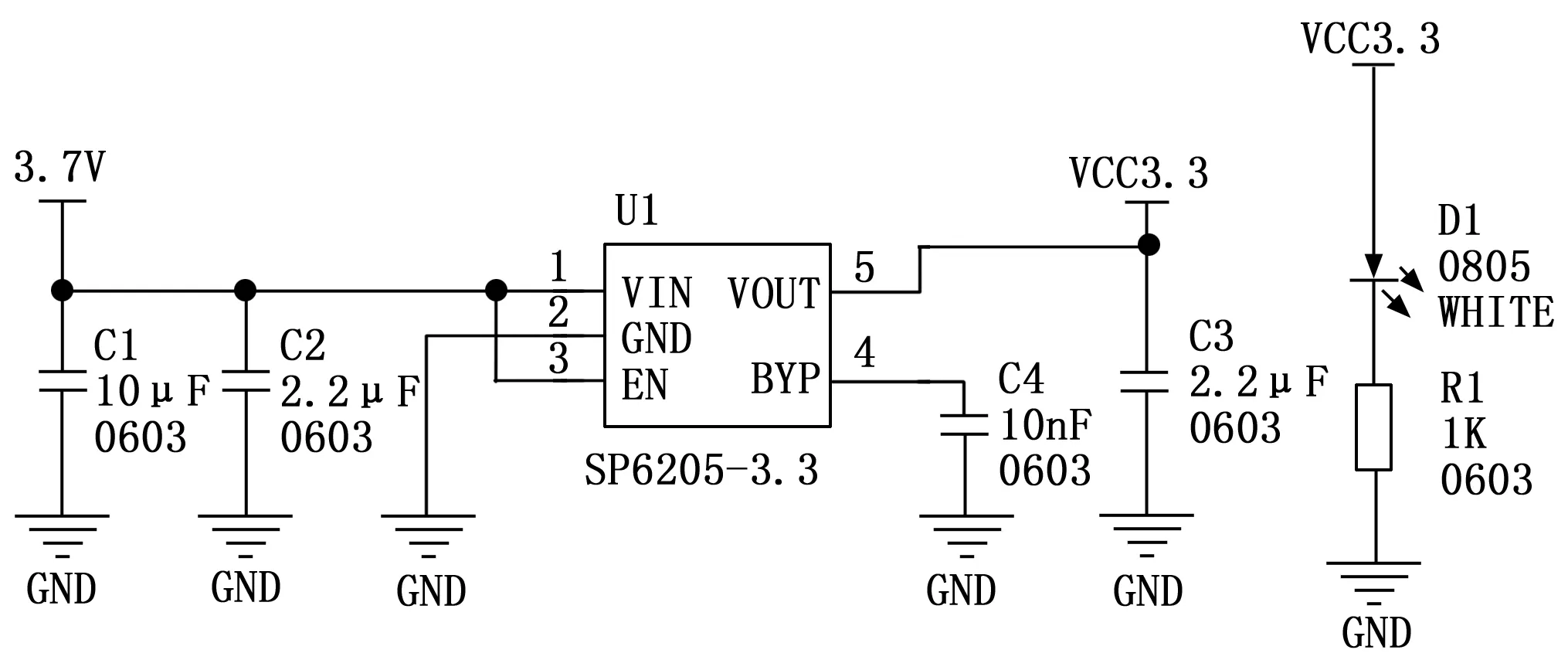
图3 电源电路
1.2.2 时钟电路
时钟电路共提供两个时钟源,其中Y2为32.768 kHz晶振,为RTC提供时钟,Y1为8 MHz晶振,为整个系统提供时钟。
1.2.3 复位电路
复位电路采用按键和保护电容构成复位电路,在CPU无法正常工作时,按下按键,可以进行物理复位CPU。
1.2.4 启动电路
启动电路如图4所示,BOOT1和BOOT2来决定启动模式,BOOT1接电平,并且和BOOT2通过插针连接,通过跳线可以配置三种不同的模式。
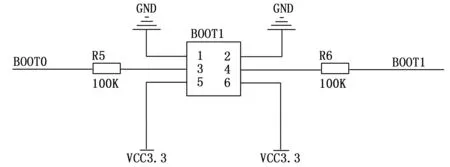
图4 启动电路
1.3 WIFI通信模块
WIFI通信模块电路图如图5所示,其中,PA9是串口1的发送管脚,PA10是串口1的接收管脚。

图5 WIFI通信模块电路图
2 软件主程序设计
四旋翼飞行器姿态监测系统设计采用图形化编程软件LabVIEW,主要实现功能:(1)实时采集飞行姿态四个关键参数,并对参数进行显示、处理、存储、报警和回放;(2)若采集到的数据超过预先设置的阈值,触发报警;(3)对历史数据进行回放,方便查询不同时刻的历史记录。
监测系统主程序流程如图6所示,系统设置数据采集时间间隔、参数阈值,将采集到的数据实时显示在软件界面,系统软件对实时数据进行处理。当飞行高度、速度值超过预先设定的阈值,则触发报警并显示,软件系统重新发送飞行控制指令;当飞行高度、速度值没有超过预先设定的阈值,则飞行继续并进行数据采集、显示等。
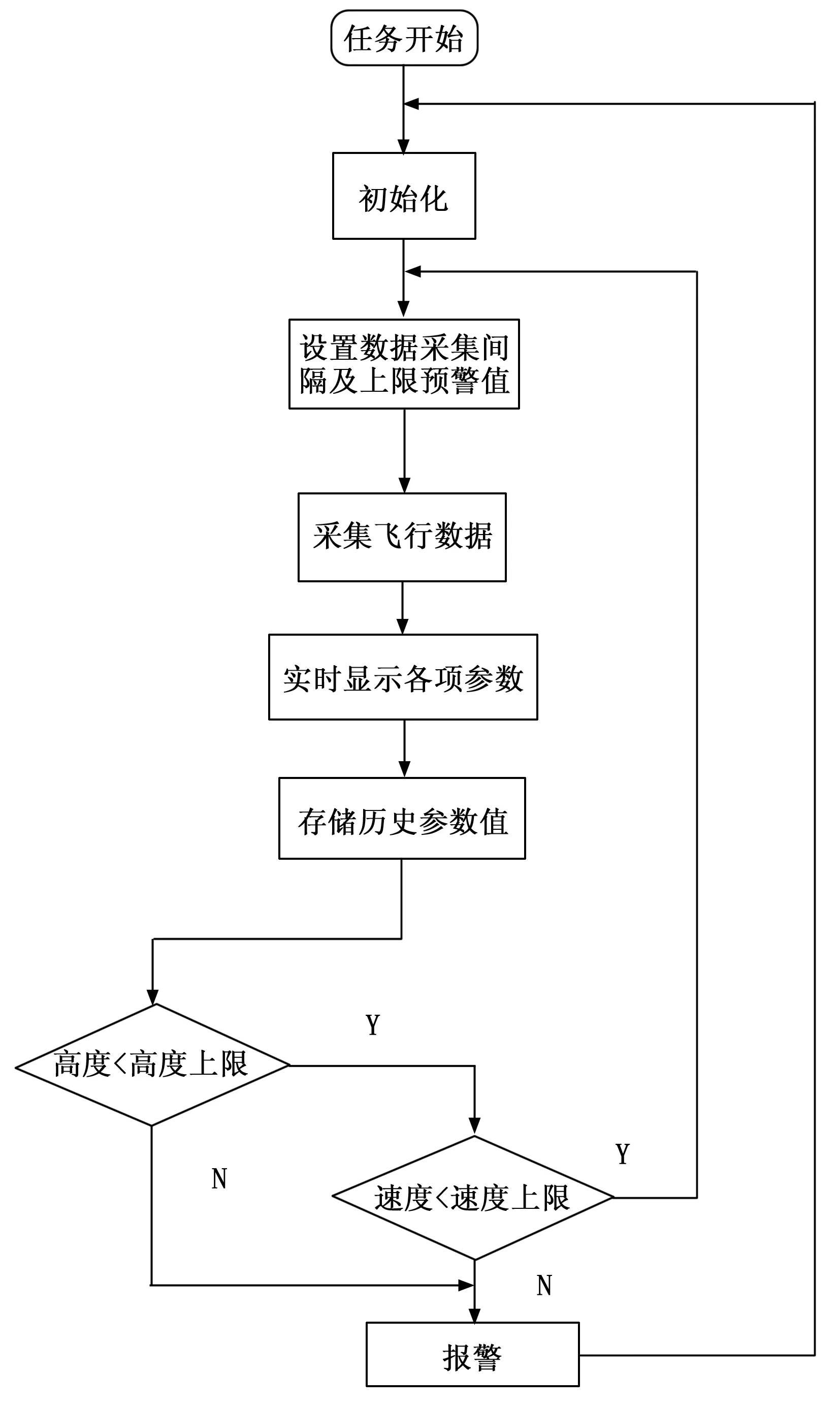
图6 监测系统主程序流程图
3 姿态监测系统面板设计
姿态监测系统分为两个子面板,实时数据采集显示子面板和历史数据查询回放子面板。
3.1 实时数据采集显示子面板
实时数据采集显示子面板由三个模块组成:参数设置模块、数据显示模块和指令发送模块。主要包括参数设置、实时显示波形、阈值设定及报警系统、开始保存按钮、历史数据回放按钮和停止按钮、指定参数设置及发送按钮。
3.1.1 参数设置模块
参数设置模块包括端口号、波特率和数据位。建立与四旋翼飞行器通信的前提是必须设置好端口号,波特率设定为9 600 bps,数据位选择为8位,读取8位数据。连接无人机,指示灯亮,并显示连接正常。此时数据采集开始,接受来自下位机的数据。
3.1.2 数据显示模块
数据显示模块包括阈值设定、实时数据波形和报警指示。飞行高度显示单位为m,阈值设定范围0~6 000 m,每一小格代表500 m的高度变化,保留两位有效数字。飞行速度显示单位为km/h,阈值设定范围0~400 km/h,每一小格代表25 km/h的速度变化,保留两位有效数字。俯仰角和滚转角显示单位为(°),阈值设定范围-180°~180°,每一小格代表10°的角度变化。四个参数的纵轴数值最大值会随着采集到的数据值进行改变,触发阈值时数值不再改变且相应报警指示灯亮起,四旋翼飞行器停止飞行并等待下一步指令,采集时间单位为s,设定采集时间间隔为1 s,横轴每一小格代表20 ms的时间变化。采集时间间隔为1 s,每一小格代表20 ms的时间变化。
3.1.3 指令发送模块
用户可以在上位机界面自行设定四旋翼飞行器的参数,但是不能设定阈值,输入的参数数值有效数字为两位,飞行高度可输入范围为0~6 000.00 m,飞行速度可输入0~400.00 km/h,俯仰角可输入范围为-180.00~180.00°,滚转角可输入范围为-180.00~180.00°,相应参数设置完成后点击数值下方的按钮即可将设定的参数数值发送给下位机,在完成指令发送之后,点击“开始保存”按钮,上位机开始对下位机采集到的数据进行实时保存,如果需要对历史数据进行查看,点击“历史数据回放”,即可调用历史数据查询回放子面板,完成对历史数据的回放和查看操作。
3.2 历史数据查询回放子面板
历史数据查询回放子面板包括四个参数的历史数据记录及波形、读取历史数据表格按钮及返回主页按钮。主要完成调取存储在根目录文件里的历史数据的excel表格,同时显示飞行高度、飞行速度、俯仰角和滚转角的历史数据变化波形。
监测系统工作步骤:
1)在实时数据采集显示子面板上点击“历史数据回放”按钮,即历史数据查询回放子面板开始工作。
2)点击“点击打开数据文件”按钮,开始调取相应的历史数据,历史数据以excel表格的形式存储在文件里,同时以波形图的形式显示在前面板。
3)点击“主页”按钮,返回实时数据采集显示子面板,可以在观察历史数据的同时观察实时数据的变化。
4 姿态监测系统功能测试
4.1 四旋翼飞行器起飞姿态模式
四旋翼飞行器起飞姿态模式如图7所示,点击“连接无人机”按钮,设置上位机端口号和网络测试助手端口号,选择传输协议为“TCP Client”,设置实验数据采集时间间隔为100 ms,开始采集实时数据。点击“停止”按钮,历史数据以excel表格的形式自动保存至文件。由图可见,四旋翼飞行器正处于起飞模式,飞行高度、飞行速度、俯仰角和滚转角都呈递增的趋势。
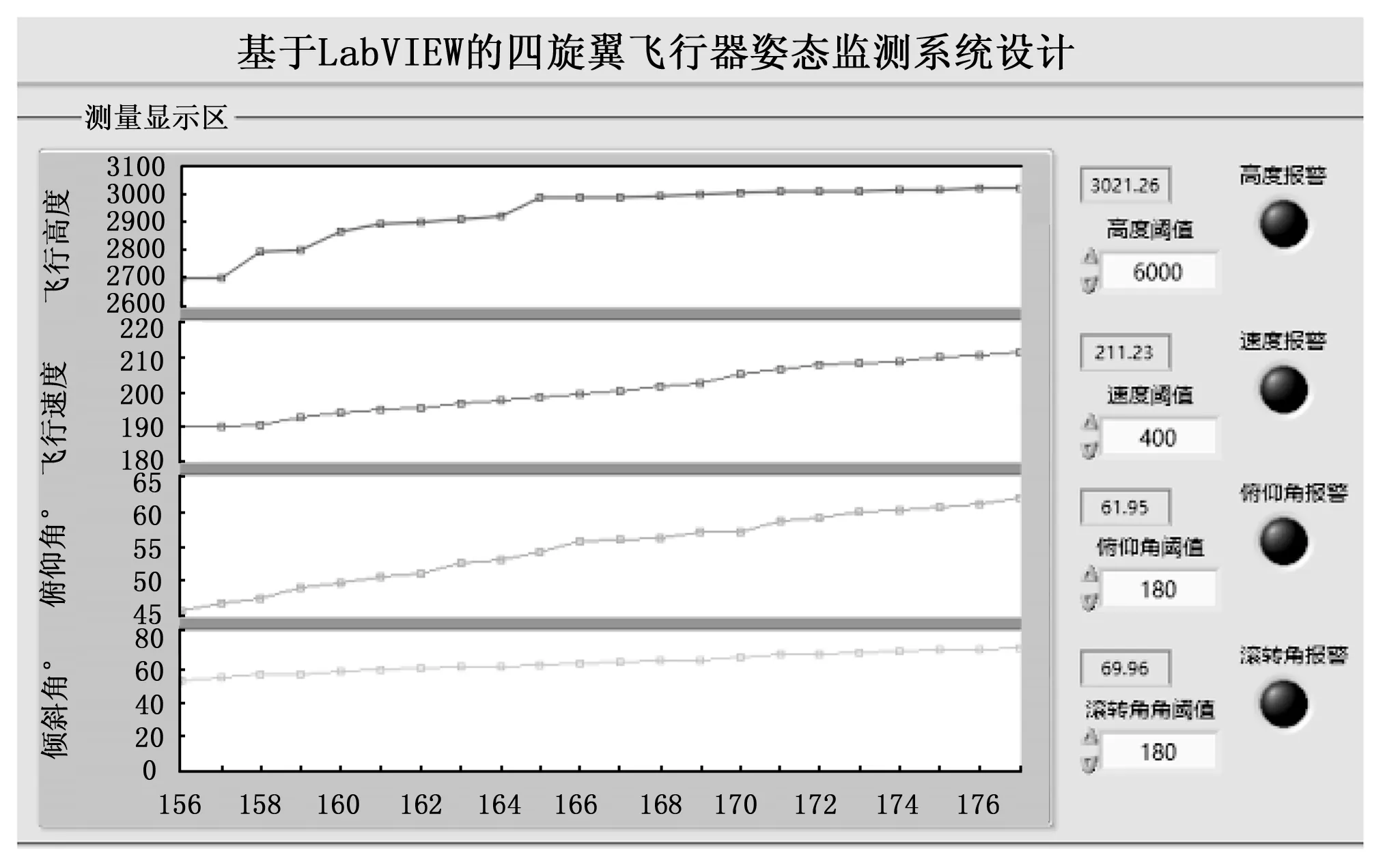
图7 四旋翼飞行器起飞姿态模式
4.2 四旋翼飞行器平稳飞行姿态模式
四旋翼飞行器平稳飞行姿态模式如图8所示,当四旋翼飞行器加速起飞之后,说明系统运行正常,从177 s时刻开始给四旋翼飞行器发送指令,使其减缓加速上升,指令发送间隔为1 s,178 s时刻之后四旋翼飞行器减缓加速上升。当时间到达198 s时刻,飞行高度从3 033.95 m缓慢增加至3 036.23 m,飞行速度由230.00 km/h缓慢增加至231.99 km/h保持不变,俯仰角由73.00°缓慢增加至74.79°保持不变,滚转角由81.00°缓慢增加至82.77°保持不变,四旋翼飞行器呈平稳飞行的趋势,处于平稳飞行姿态模式。
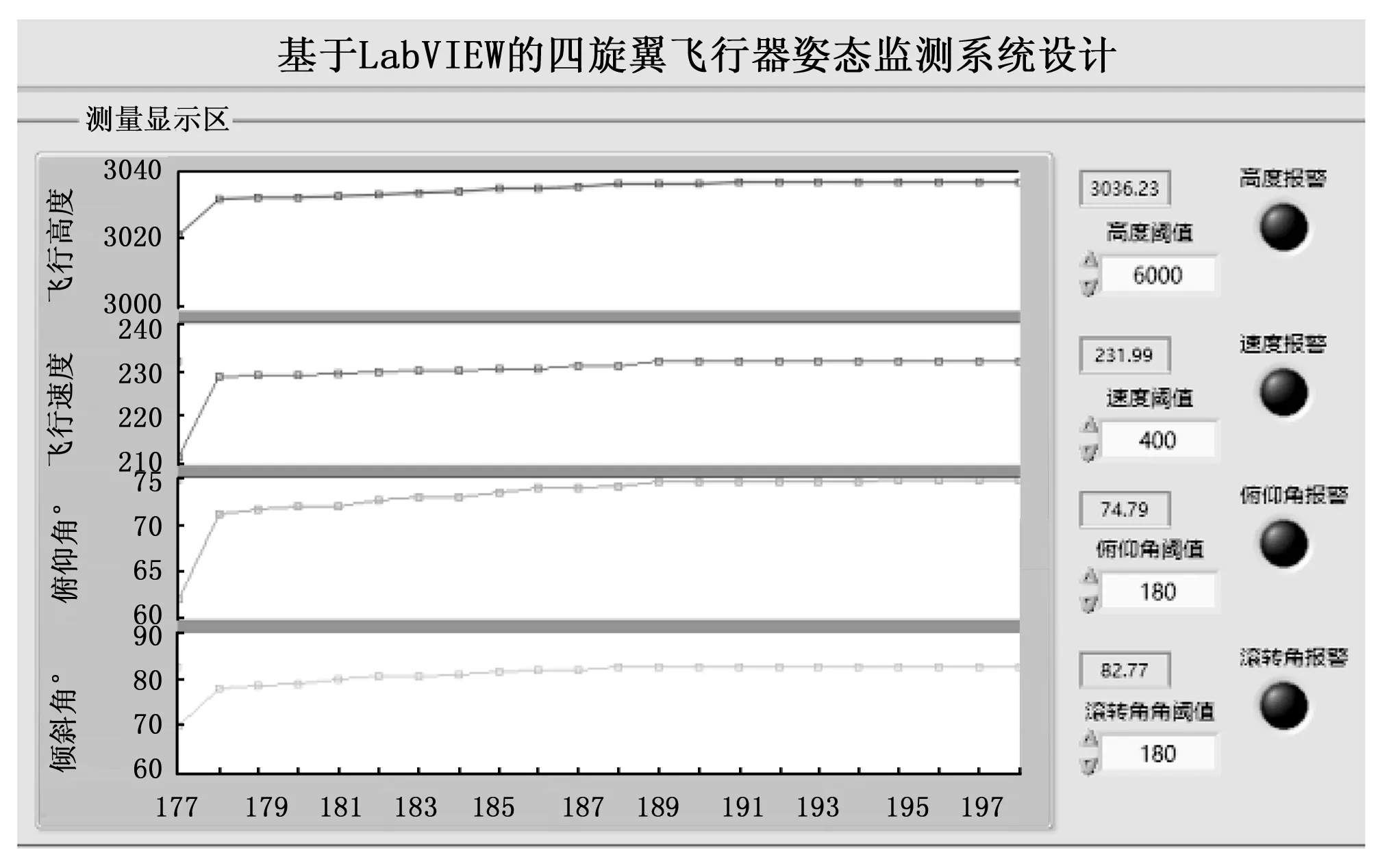
图8 四旋翼飞行器平稳飞行姿态模式
4.3 四旋翼飞行器降落姿态模式
四旋翼飞行器降落姿态模式如图9所示,系统给四旋翼飞行器发送指令,使其减速下降,指令发送间隔为1 s,199 s时刻起四旋翼飞行器逐渐减速。当时间到达220 s时刻,飞行高度从3 036.23 m缓慢降低至3 014.51 m,飞行速度由231.99 km/h缓慢减小至207.46 km/h,俯仰角由74.79°缓慢增加至-13.01°,滚转角由82.77°缓慢减小至-23.54°。四旋翼飞行器呈减速下降的趋势,处于降落姿态模式。
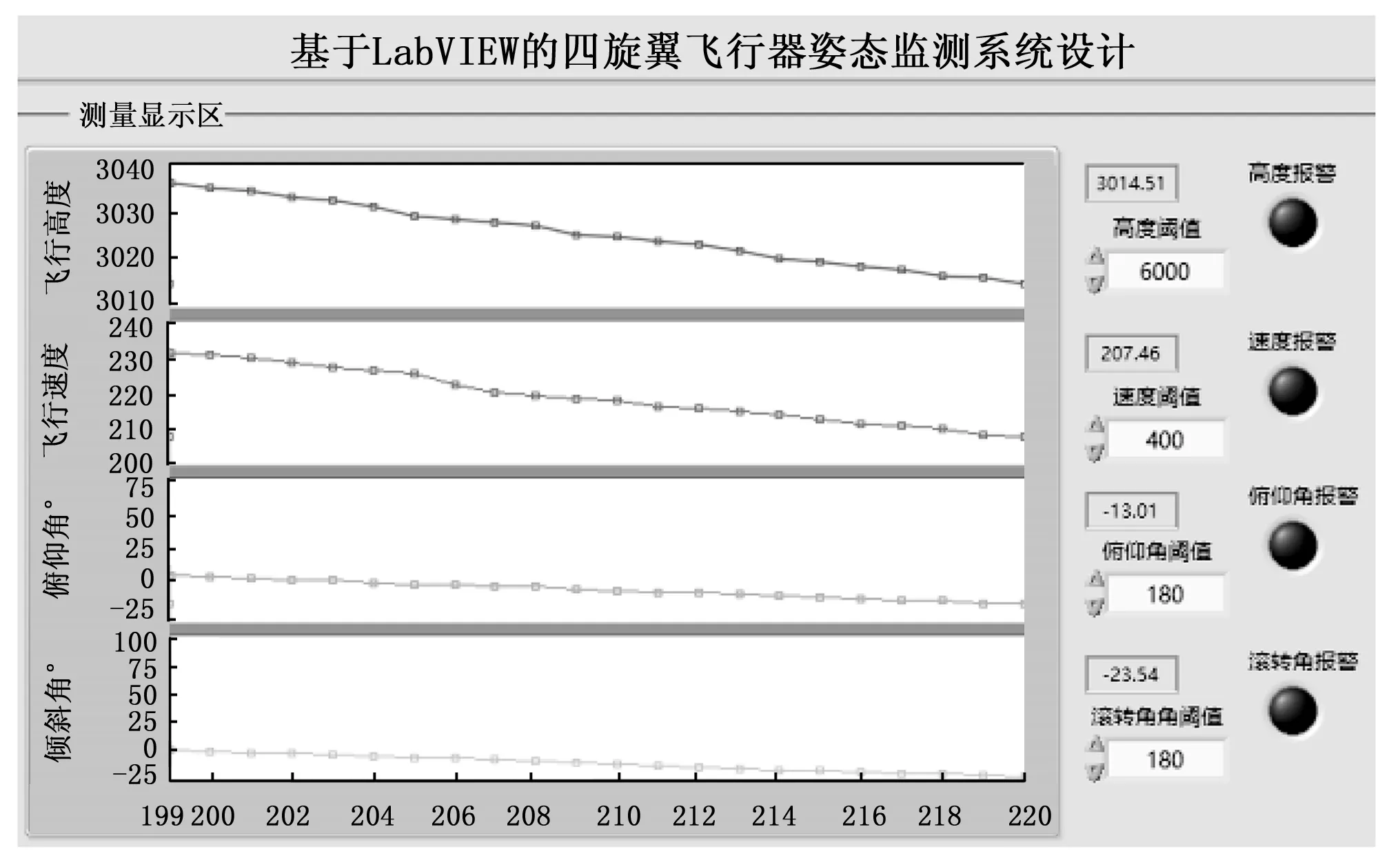
图9 四旋翼飞行器降落姿态模式
4.4 四旋翼飞行器报警模式
四旋翼飞行器报警模式如图10所示,触发报警模式需要等待四旋翼飞行器一直加速上升,因此从303 s时刻开始采集数据。并记录数据至324 s时刻,飞行高度从5 820.25 m增加至6 000.01 m,此时飞行高度大于预先设定的阈值。触发报警,报警指示灯亮,四旋翼飞行器不再上升,上位机数据采集停止,飞行速度由381.25 km/h增加至400.01 km/h,此时飞行速度也大于预先设定的阈值,触发报警,报警指示灯亮,不再提供加速动力,俯仰角由121.16°增加至139.54°,滚转角由132.54°增加至149.21°。由于飞行高度和飞行速度触发报警,上位机停止采集数据,此时四旋翼飞行器处于报警模式。
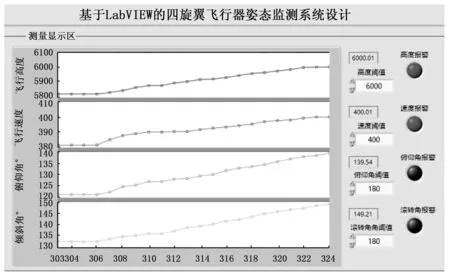
图10 四旋翼飞行器报警模式
四旋翼飞行器在四种不同的姿态监测模式下,其飞行高度、飞行速度、俯仰角和滚转角的实时监测数据见表1。
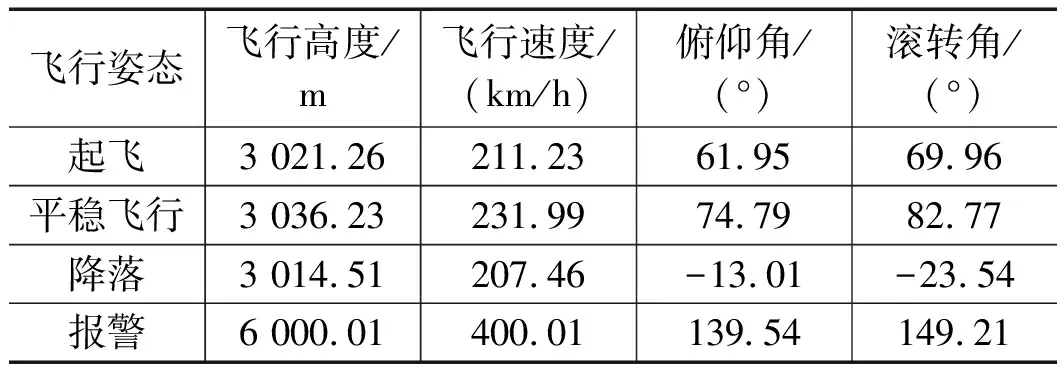
表1 四旋翼飞行器姿态监测模式下的实时数据
4.5 四旋翼飞行器历史数据回放模式
历史数据回放模式如图11所示,可以实现对采集到的数据进行存储和回放,进而对历史数据进行统计分析。在前面板中运行程序,点击“开始保存”,采集结束后,打开“历史数据回放”,即完成对历史数据的回放。
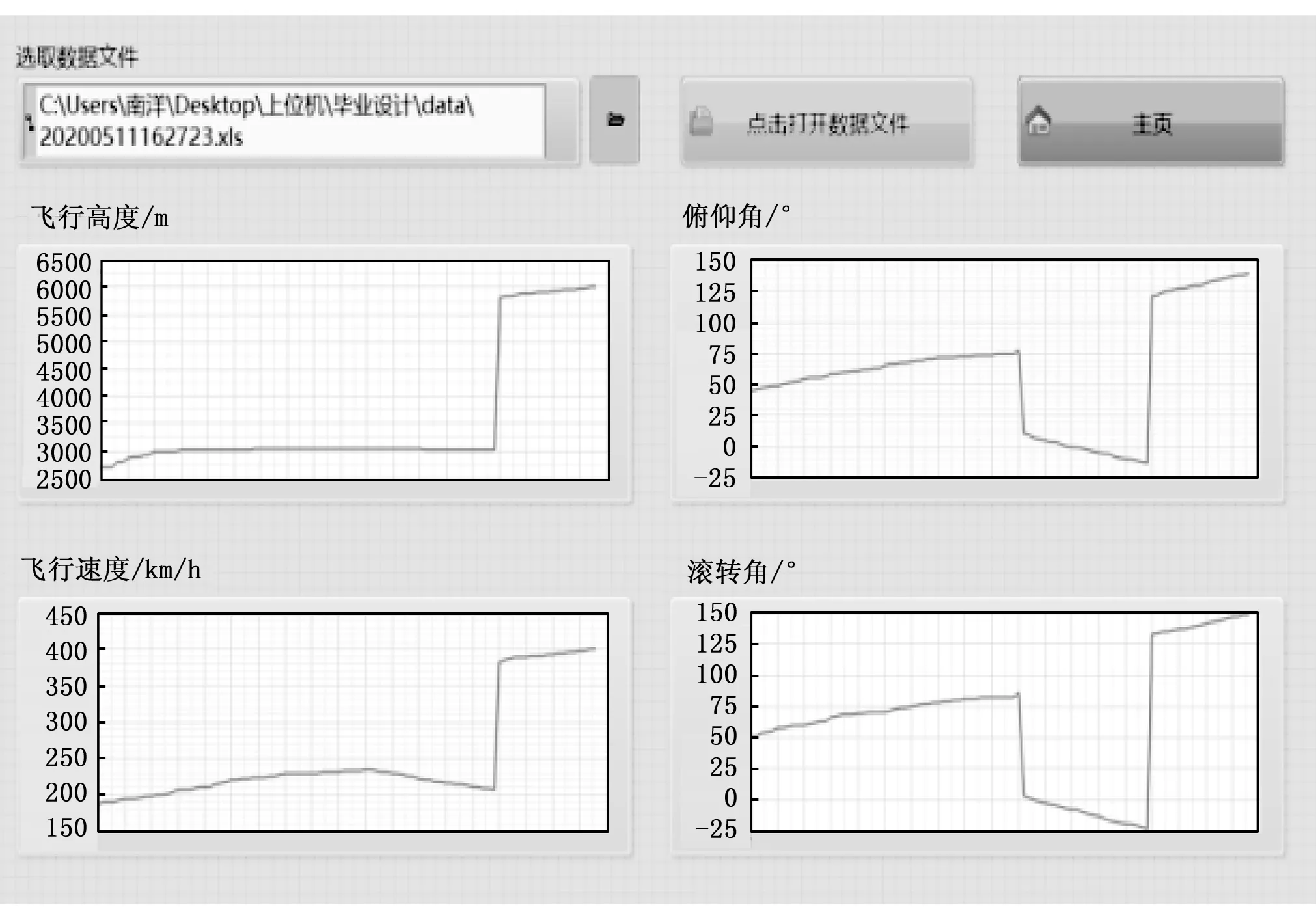
图11 四旋翼飞行器历史数据回放模式
历史数据回放模式显示的四个参数的波形图横轴从第1格至第4格为起飞姿态模式,此时这四个参数均为递增的趋势;横轴从第5格至10格为平稳飞行姿态模式,此时四个参数的数值基本保持不变;横轴从第11格至15格为降落姿态模式。此时四个参数的数值均为递减趋势;横轴从横轴第16格至19格为报警模式,此时四个参数的数值均为递增趋势,且飞行高度和飞行速度都超出阈值,触发报警,数据停止采集。
实时数据进行采集的同时,监测系统会以excel表格的形式自动将实时数据保存在相应的根目录。打开文件中的表格,四旋翼飞行器在姿态监测模式下飞行高度、飞行速度、俯仰角和滚转角的历史数据如表2所示。
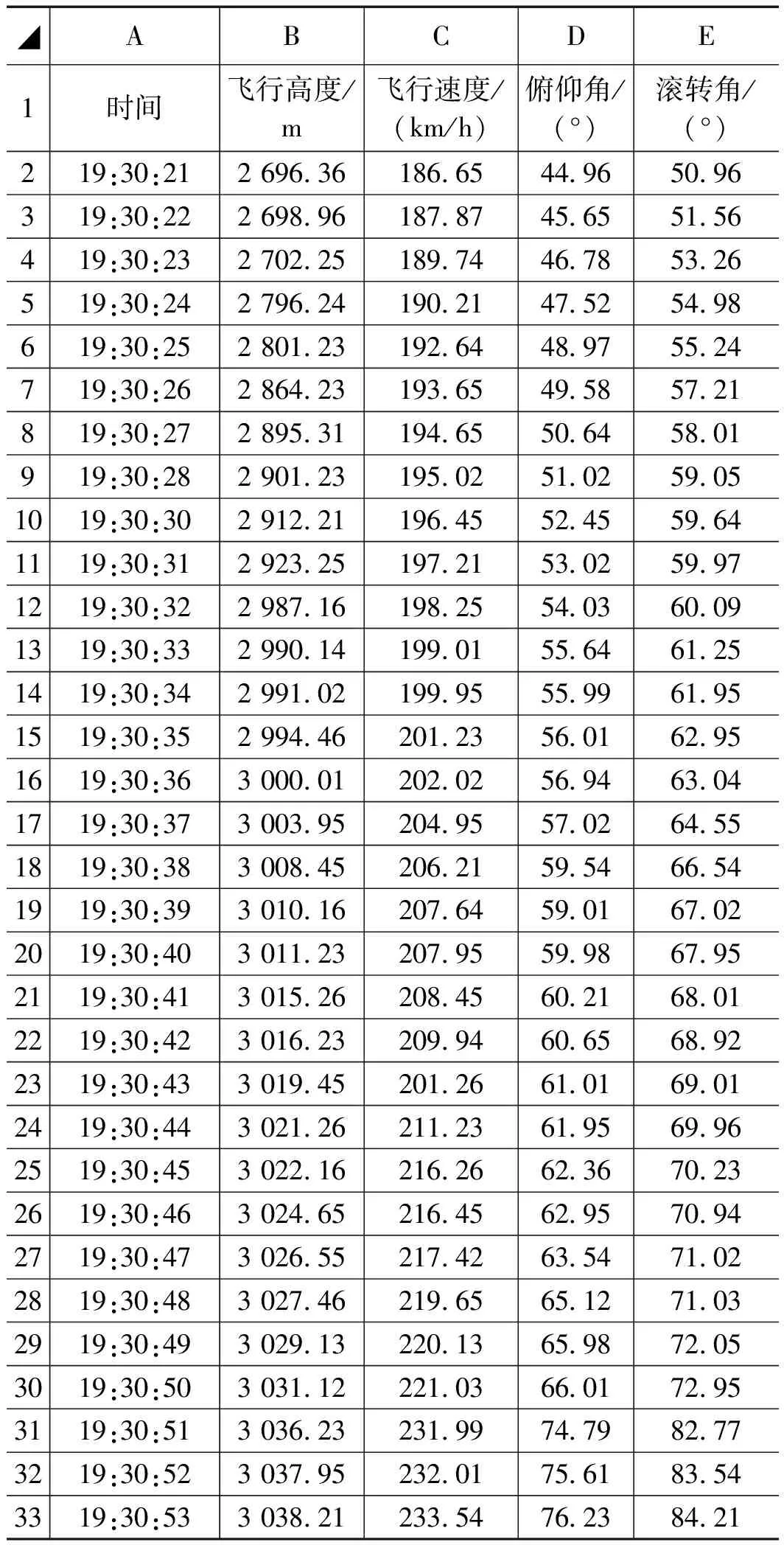
表2 历史数据
5 测试结果分析
5.1 实时数据监测
在完成系统软件测试后,打开保存在文件夹中的历史数据excel表格,见表3。8组连续的历史监测数据,飞行高度从2 696.35 m至2 895.31 m,飞行速度从186.65 km/h至194.65 km/h,俯仰角从44.96°至50.64°,滚转角从50.96°至57.21°。
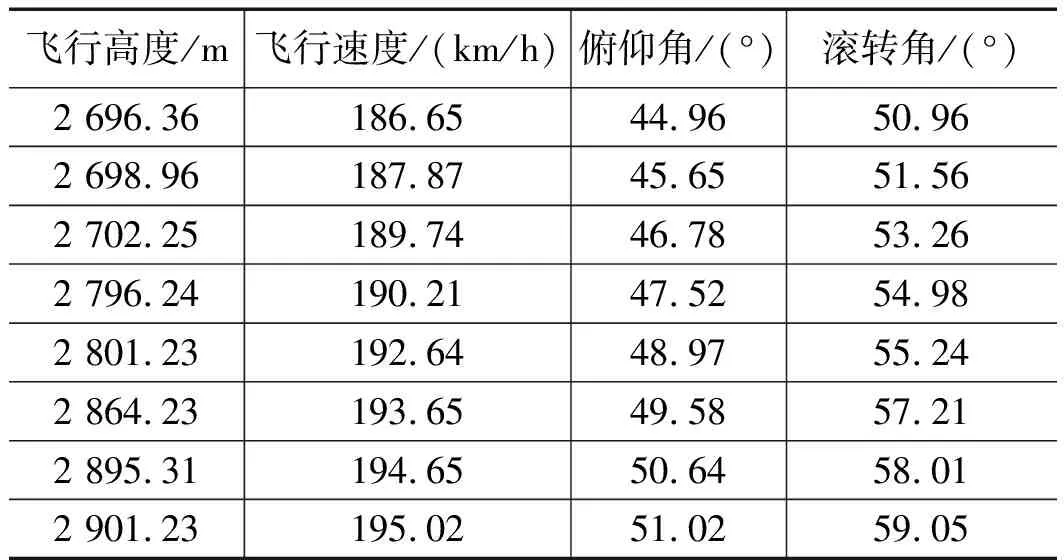
表3 四旋翼无人机飞行姿态监测数据(8组)
5.2 系统误差分析
为了使误差分析更为精准,所以取多次采集到的数据的算术平均作为真实值,计算出各参数的绝对偏差和相对偏差的大小。飞行高度、飞行速度、俯仰角和滚转角的误差分析见表4~7。

表4 飞行高度误差分析

表5 飞行速度误差分析
为了使误差分析更为精准,取多次采集到的数据的算术平均作为真实值,计算出各参数的绝对偏差的大小。飞行高度、飞行速度、俯仰角和滚转角的绝对偏差拟合见图13。
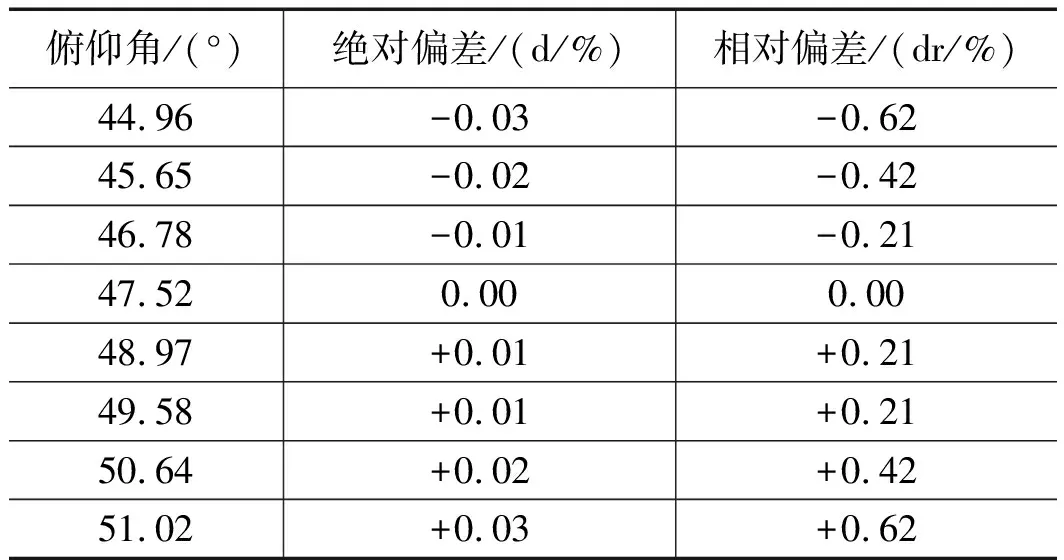
表6 俯仰角误差分析

表7 滚转角误差分析

图13 绝对偏差拟合图
由图13(a)可知,飞行高度从2 696.35 m变化至2 895.31 m时,其绝对偏差由-1.12%递增至+1.07%;由图13(b)可知,飞行速度从186.65 km/h变化至194.65 km/h时。其绝对偏差由-0.05%递增+0.04%;由图13(c)可知,俯仰角从44.96°变化至50.64°时,其绝对偏差由-0.03%递增至至+0.03%;由图13(d)可知,滚转角从50.96°变化至57.21°时,其绝对偏差由-0.04%递增至+0.04%。综合分析,四个参数的绝对偏曲线图差都呈递增的趋势,但是任一参数的相邻两组绝对偏差之间的差值小于0.5%,说明采集到的参数值接近于真实值。
6 结束语
本文研究的基于LabVIEW的四旋翼飞行器姿态监测系统设计,下位机采用MPU-9250九轴传感器和STM32F103RBT6单片机,上位机面板使用了数据显示,波形图表,报警指示灯等控件,利用WiFi通信 将上位机和下位机连接,下位机采集飞行高度、飞行速度、俯仰角和滚转角,并将信号传入上位机中。本系统测量范围飞行高度:0~6 000 m;飞行速度:0~400 km/h;俯仰角:-180°~180°;滚转角:-180°~180°。当采集到的数据值超过预先设定的阈值时,触发报警,用户可以在上位机子面板随时查看和调取历史数据。系统经过测试,设定采集时间间隔1 s,完成对采集数据的记录、显示、保存和回放,采集数据的绝对偏差值小于0.5%,实现了无人机的姿态监测,满足了控制小型四旋翼无人机的实际需要。
