面向高速铁路追踪运行的列车智能体模型
2022-02-09王超宇宋嘉雯
王超宇,宋嘉雯
(广州地铁设计研究院股份有限公司,广东广州510010)
1 引言
高速铁路列车追踪仿真是研究列车运行的重要手段,日本使用UTRAS系统[1]对新干线各种类型的列车进行牵引计算并模拟实际场景进行仿真。美国使用TPC(Train Performance Calculator)列车牵引计算仿真软件[2],可以模拟整条线的实际运营情况,并对列车的牵引性能进行评估。
Zhou等基于元胞自动机方法,对固定闭塞、准移动闭塞情况下的列车运行进行了仿真研究,通过对列车加减速度的计算,实现了对列车运行速度的实时动态控制[3]。李望从列车仿真的现状和需求出发,结合列车仿真特点,详细研究了列车运行仿真的关键技术及应用方面的相关问题,确定了合适的列车在区间的运行规则[4],彭其渊等基于高速铁路列车追踪运行仿真模型,研究压缩列车到达间隔时间的方法[5]。
列车智能体模型是高速铁路列车追踪运行仿真模型的主体,列车智能体是一种具有自治性、社会性、反应性以及能动性的实体[6]。高速铁路列车运行仿真中涉及到多个列车智能体,它们构成了列车智能体群,列车智能体群能够实时获取外界环境的信息,并结合自身属性和相应规则进行自主决策[7,8]。
本文设计的列车智能体以其基本属性为基础,具备一系列应对外界环境变化的决策机制,包括列车牵引计算、列车运行决策机制、列车追踪运行机制等。
2 列车牵引计算模块
列车牵引计算模块是列车智能体运行决策的基础,该模块能根据列车位置、运行速度、制动性能、线路数据等信息,实时计算列车的制动减速度,并绘制得到列车的一次连续制动曲线,指导列车的运行决策。
2.1 列车智能体属性
列车智能体属性包括列车固有属性以及动态属性,固有属性包括列车车次、编组辆数、列车长度、列车重量、列车牵引性能、列车制动性能等。列车动态属性为随着列车运行仿真而实时更新的属性,包括列车实时里程位置(车头、车尾)、列车实时速度、列车运行方向、列车速度决策属性等[9]。
2.2 列车一次连续制动曲线
高速铁路列车牵引计算模块的核心在于列车一次连续制动曲线的计算,首先需要输入列车的初速度v0、末速度v1、制动起点里程(车头)s0、列车长度L等参数信息。根据积分的思想,将列车制动过程分为若干个短暂时间间隔Δt的累加,当Δt足够小时,在每一个时间间隔内,列车的制动过程可视为匀减速运动。列车一次连续制动曲线计算设计的参数和变量如表1所示,具体的计算流程如图1所示。

表1 列车一次连续制动曲线参数及变量表

图1 一次连续制动曲线计算流程图
3 列车运行决策机制
在列车智能体牵引计算功能的基础上,列车智能体决策机制实现了列车运行速度决策功能,该功能可为列车智能体在下一个时间步长内的速度控制作出决策,即列车智能体根据线路条件、位置里程、列车运行速度、列车牵引制动性能得到列车一次连续制动曲线,根据准移动闭塞原理结合前方闭塞分区占用情况、区段限速信息,确定列车在下一时间步长内的运行速度选择,具体包括加速运行、制动运行或匀速运行三种方案[10]。
列车运行速度决策机制由两个约束共同决定,其一为闭塞分区占用约束,其二为区段限速约束。在列车的仿真运行过程中,在每一个时间步长开始前,列车智能体均会根据得到的速度-距离控制曲线[11],与两个约束条件的速度控制点进行比较,输出各自的速度控制决策结果,具体的约束如下所示。
3.1 闭塞分区占用约束
列车在区间追踪运行过程中,应当满足闭塞分区占用约束,即列车能在前方被占用闭塞分区入口前保留L防安全距离的位置及时停车的要求,上下行列车分别需满足公式的约束要求。

(1)

(2)

3.2 区段限速约束
列车在区间运行过程中,应当满足区段的限速要求约束,包括进站咽喉区的限速,即列车能在进入限速区段入口前减速到限制速度的要求,上下行列车分别需要满足公式的约束要求。

(3)

(4)

对于上述任一约束条件,当满足该约束且列车运行速度未达到最高运营速度时,该约束条件的决策结果为列车加速运行;当满足该约束且列车运行速度达到最高运营速度时,输出的决策结果为列车匀速运行;当不满足该约束时,输出的决策结果为列车减速运行。
两个约束的综合结果以导向安全为原则,如表2所示。当且仅当两者输出同时为加速时,列车在下一个时间步长内选择加速运行;当一个输出为加速一个为匀速或两者同时为匀速时,列车选择匀速运行;当任意一个输出为制动时,列车选择制动运行。该原则满足了列车在最不利的情况下,能够在前方最近占用闭塞分区的入口位置(保留L防安全距离)减速到零,或在限速区段的入口位置(保留L防安全距离)减速到限速值的要求。

表2 列车运行综合决策表
4 列车追踪运行机制
4.1 列车通信机制
列车通信需要满足多个列车智能体在运行过程中信息互享、列车智能体与调度中心信息通信、列车智能体实时获得线路信息的功能,是列车追踪运行模型的基础。列车运行信息包含了列车的固有属性和列车运行过程中所有的实时信息[12],主要包括了列车牵引(制动)性能参数、列车速度、列车加速度、列车实时空气阻力、列车实时里程信息等。线路信息包括了曲线、坡度、隧道、闭塞分区占用情况、区间限速情况等。
列车智能体信息通信是多智能体模型必须解决的问题[13],多智能体间两两直接通信会造成资源浪费,智能体信息传递紊乱的问题。在仿真模型中,构建实时共享数据库,采用黑板通信机制实现多列车间的信息传递问题,能够有效解决上述问题[14]。

图2 列车智能体通信机制
列车智能体通信机制如图2所示,其中黑板相当于模型中的共享数据库,共享数据库包括了所有列车的运行信息以及实时的线路信息。列车智能体将需要通信的信息存储在该数据库中,不同列车间的信息交互通过访问该数据库实现。列车在决策时,访问共享数据库,获取其它列车的状态信息,同时结合自身状态,作出相应决策。在每次时间步长行动后,需要及时更新列车信息,并同步到共享数据库中。
4.2 单列车运行机制
由于Anylogic轨道库列车智能体的局限性,在列车生成后无法改变其加速度与减速度值。因此无法满足列车智能体模型牵引计算对列车加减速度实时变化的高精度要求,故通过二次开发,设计了特定的列车运行机制以解决上述问题。以进站、发车信号机为界,分为列车智能体一个时间步长内的发车、区间、进站运行逻辑,同时以上述三个运行逻辑及相关判断条件为基础,形成单列车完整运行逻辑。
1)列车智能体一个时间步长的发车运行逻辑
列车一个时间步长的发车运行逻辑如图3所示,每次生成的列车智能体由共享数据库进行赋值,且只运行一个时间步长。在出站信号机开放前,列车在站内等待;出站信号机开放后,列车智能体需根据前文的牵引计算模块及列车运行决策机制运行一个时间步长,并采用列车通信机制,将所有的列车运行信息存储在共享数据库中,随后列车智能体消失。
在后续的仿真循环过程中,在该列车智能体消失的同时,将产生另一个列车智能体继承前一列车智能体的全部信息,即共享数据库将全部列车信息赋值给新生成的列车智能体。
2)列车智能体一个时间步长的区间运行逻辑
列车一个时间步长的区间运行逻辑如图4所示,与一个时间步长的发车运行逻辑相同,每次生成的列车智能体由共享数据库进行赋值,在运行一个仿真时间步长后,列车智能体将全部信息存储在共享数据库中,随后消失。同理,在仿真循环过程中,在该列车智能体消失的同时,将产生新的列车智能体继承前一列车智能体的全部信息。
3)列车智能体一个时间步长的到达运行逻辑
列车一个时间步长的到达运行逻辑如图5所示,和前两个运行逻辑相同,每次生成的列车智能体由共享数据库进行赋值,并只运行一个时间步长。在列车接近车站过程中,当进站信号仍未开放时,列车将在站外等待;当进站信号开放后,根据列车牵引计算和列车运行决策机制,确定列车智能体在该时间步长内的加减速度。同理,在仿真循环过程中,在该列车智能体消失的同时,将产生新的列车智能体继承前一列车智能体的全部信息。

图3 列车一个时间步长的发车运行逻辑

图4 列车一个时间步长的区间运行逻辑
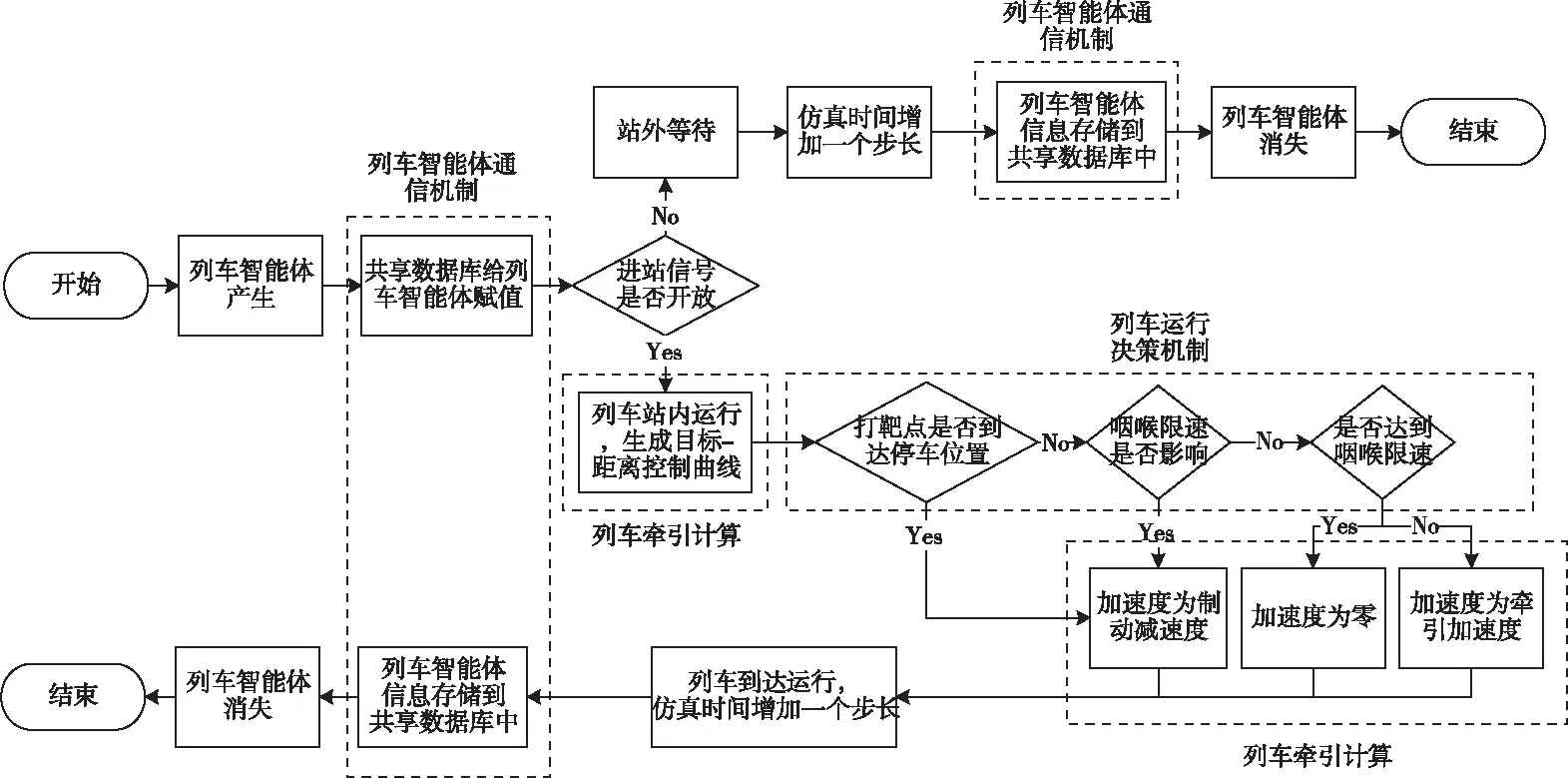
图5 列车一个时间步长的到达运行逻辑
4)单列车完整运行逻辑
单列车运行过程分为发车运行、区间运行和到达运行三个阶段,其完整运行逻辑以上述的列车一个时间步长出发、区间、到达的运行逻辑为基础,结合循环和相关判断形成完整的单列车运行逻辑,如图6所示。

图6 单列车完整运行逻辑
发车运行循环:在每次运行一个时间步长的发车运行逻辑后,判断列车是否出清出站信号机,若无,则继续循环一个时间步长的发车运行逻辑;若已出清出站信号机,则从列车发车运行循环中退出,转到列车区间运行循环。
区间运行循环:在每次运行一个时间步长的区间运行逻辑后,判断列车是否到达进站信号机处,若未到达,则继续在列车区间运行中循环一个时间步长;若到达,则将列车运行从区间运行循环中退出,转到列车到达运行循环。
到达运行循环:在每次运行一个时间步长的到达运行逻辑后,先后判断列车是否出清车站咽喉区以及是否到达停车位置。若未出清咽喉区,则继续到达运行循环;若出清咽喉区但未到达指定停车位置,也继续到达运行循环,同时开始为后行列车办理接车进路;若列车到达指定停车位置,则结束列车运行。
4.3 多列车连续追踪运行机制
高速铁路列车追踪运行仿真模型需要实现多个列车智能体追踪运行的功能[15,16],并通过仿真得到列车追踪间隔时间。故模型在线路路网模型、列车智能体牵引计算、列车运行决策机制、列车通信机制、单列车运行逻辑的基础上,结合列车发车间隔时间ΔT和到发线组合运用方案,设计多列车连续追踪流程,其步骤如下所示。
Step1:模型启动,加载路网拓扑模型和线路参数信息,转Step2。
Step2:输入列车发车间隔时间ΔT,列车连续追踪列数m,转Step3。
Step3:仿真开始,设仿真时间ttime=0,列车序号n=1,转Step4。
Step4:n号列车智能体生成,令n=n+1,转Step5。
Step5:调用列车一个时间步长的运行逻辑,所有列车智能体向前运行一个单位时间,令time=time+1,转Step6。
Step6:判断第n列车是否到达终点站,若到站,则转Step7;否则,转Step8。
Step7:判断n==m是否成立,若是,转Step9;否则,转Step8。
Step8:判断ttime==n×ΔT和n≤m是否同时成立,若是,转Step4;否则,转Step5。
Step9:输出相关数据,仿真结束。
5 列车智能体追踪运行仿真实验
5.1 列车智能体追踪运行仿真实验结果
选取CRH380BL型动车组为仿真主体进行追踪运行,采用8动8拖的16节编组方式,仿真中最高运行速度为300km/h。以京沪高铁沪宁段上海虹桥站下行到达为仿真场景,在100至240秒不等的发车间隔时间条件下,两列车追踪的速度-距离曲线如图7所示。
5.2 仿真结果分析
综合上述结果可以发现:
1)在发车间隔时间较小的情况下,后行列车会受到前行列车未出清闭塞分区的影响而提前减速,速度-距离曲线呈现锯齿形。
2)随着发车间隔时间的增加,前行列车对后行列车的影响不断减小。
3)结合列车追踪间隔时间的定义,可以判断在该实验条件下,列车区间追踪时间在160-180秒左右,到达追踪间隔时间在240秒左右,与实际写实情况符合度较高。
5结论
由于Anylogic软件功能的局限性,无法实现高速铁路列车的高精度追踪实验,故本文在Anylogic软件轨道库的基础上进行开发,构建了具有追踪运行功能的列车智能体模型。主要技术难点在于列车牵引计算的一次连续制动曲线生成、列车智能体运行决策的相关机制以及列车追踪运行机制的分析。进而以京沪高铁沪宁段上海虹桥站高速场下行到达为仿真场景,进行了列车追踪运行的相关实验,该实验结果与实际写实情况符合度较高,证明该列车智能体模型可在高速铁路列车追踪的相关研究中进行运用。
在我国高速铁路列车追踪间隔时间较大的情况下,如何采取有利于压缩高速铁路列车追踪间隔时间的措施,并通过列车追踪运行仿真实验进行验证,研究追踪运行的相关特性,是未来研究运用的重要方向。

图7 不同发车间隔下前后行列车速度-距离曲线图
