部分联网环境下交叉口混合动力汽车分层控制
2022-02-09钱立军
钱立军,宣 亮,陈 健,陈 晨
(合肥工业大学汽车与交通工程学院,安徽 合肥 230009)
1 引言
2019年全国汽车的保有量超过2.5亿辆,由此导致化石能源大量消耗、环境污染、交通拥堵及汽车行驶安全等问题日益严重。电动化、智能化、网联化、共享化是当前中国汽车工业发展的四大主题,并且推动我国混合动力汽车、智能交通系统、车联网以及智能汽车等技术的快速发展[1]。信号路口是智能交通系统的重要组成部分,是城市交通网络的关键节点,若对其进行协调优化控制,可以提高通行效率,减少车辆燃油消耗[2]。
国内外学者对车辆通过信号灯交叉口的通行安全及经济性进行了大量的研究,其研究对象大致可以分为常规车辆、网联车以及它们组成的混合车队三类。当研究的对象全部由常规车辆即非网联车组成时,研究人员基于车辆时延、队列长度、饱和度等指标建立传统的交通信号控制系统来改善车辆的经济性[3]。当研究对象全部由网联车组成时,车辆与交通系统可以实时通讯,车速可以根据得到的信息及时调整,从而具有良好的安全性和经济性[4-6]。考虑到目前汽车产业发展现状,网联车全面普及还需要很长时间,现阶段基于全部车辆联网环境下设计的控制策略难以得到实际应用,但是对于设计部分车辆联网环境下车辆的控制器有很大的参考价值。
在部分车辆联网环境下,Omidvar等进行了独立路口交通控制系统的部署和测试,对车辆在路口的安全性进行了验证[7];Yu等建立了混合车队的一致最优速度咨询模型,提高了车队的安全性和经济性[8];Jiang等采用最优化算法对混合车队进行车速优化,提高车队的经济性[9];林培群等提出部分联网环境下交通流向动态组合的路口自适应控制方法,提高了混合车队的通行效率[10]。现有的控制策略主要针对低流量工况或者研究对象是少量的车辆[11],对中、高及过饱和车流量工况的适应能力有限。
本文面向部分车辆联网环境下中、高及过饱和车流量工况,设计了分层控制器。在目标车速控制器中,基于模型预测控制(Model Predictive Control,MPC)策略和吉布斯(GIPPS)跟车理论,得到车辆的最优车速;在能耗控制器中,结合混合动力车辆的加速和制动信息与变等效因子的等效燃油消耗最小策略对电机和发动机进行最优功率分配。搭建MATLAB/VISSIM联合仿真模型和混合动力汽车硬件在环平台,在中、高及过饱和车流量工况下进行硬件在环试验。
2 车辆分层控制器设计
本文研究的信号灯交叉口的如图1所示,包含了检测器、控制器、信号灯、网联与非网联车辆等。

图1 信号灯交叉口示意图
分层控制器由初始输入、目标车速控制器和能耗控制器组成,如下图2所示。
目标车速控制器的核心思想是通过优化混合车队中网联车的速度分布来优化整个交通流,它可以通过检测器传递的信息识别混合车队中车辆的类型,与其中的网联车以及智能交通设施进行信息通信,接收车辆信息如初始位置、初始速度以及信号灯正时,并向网联车发送速度信息。非网联车是当前现实世界中的常规车辆,假设其为自动驾驶车辆并且网联车与非网联车在道路上的分布是随机的,二者都为混合动力汽车,其参数如表1所示。
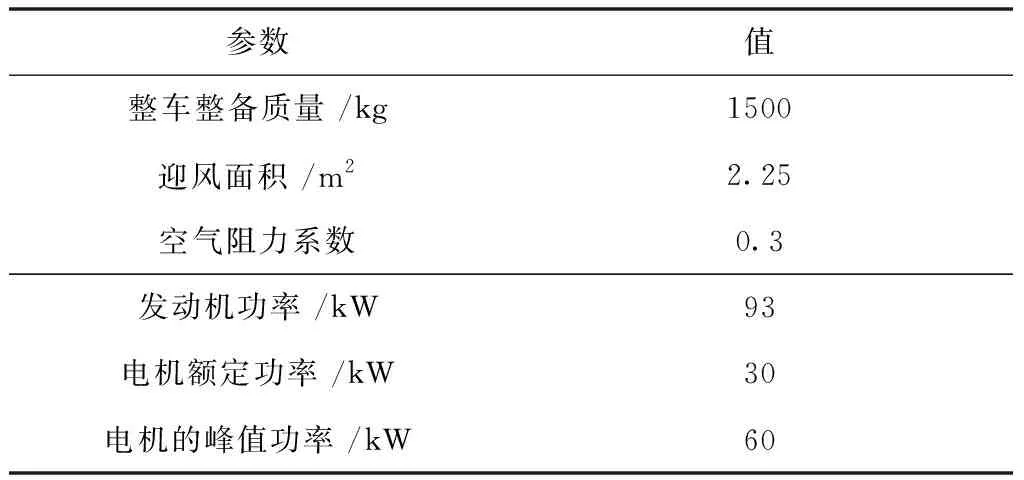
表1 车辆参数

图2 部分车辆联网系统分层控制器
能耗控制器利用接收到的最优目标车速计算出车辆的加速和制动信息,基于变等效因子的等效燃油消耗最小策略对当前电机功率和发动机功率进行最优分配,随后将控制指令发送给电机控制器和发动机控制器,从而实现电机与发动机的最佳控制,进而提升混合动力汽车的经济性。
3 目标车速控制器
在目标车速控制器中,网联车的控制是基于车联网利用目标车速控制器获取车辆当前位置、速度以及绿灯剩余时间,采用信号灯正时(Signal Phase and Timing,SPaT)方法求解目标车速并将其作为求解最优目标车速的初值,随后基于模型预测算法求解得到最优目标车速,依据当前车速与目标车速的差值进行加/减速度的计算,获得下一时刻车辆速度与位置。非网联车不能通过目标车速控制器获得外界信息,但是可以通过自身的传感器获得前后车距、前车速度以及信号灯信息,利用得到的信号灯信息、当前车速、当前车辆位置与前车位置、前车速度相结合,基于GIPPS跟车理论,计算车辆的加速度或者减速度,从而得到下一时刻车辆速度和位置。
3.1 网联车最优目标车速求解
网联车的控制目标函数是基于MPC建立的包含车速、位置、油耗等多目标优化函数,在避免车辆遇到信号灯停车以及提高燃油经济性的前提下,求得最优目标车速以及车辆位置。车辆动力学方程、车辆功率平衡方程、车辆能耗模型以及目标车速模型是求解最优目标车速函数的基础,在建立模型过程中会使用。
3.1.1 建模基础
混合动力车辆的动力学模型如下所示[12]
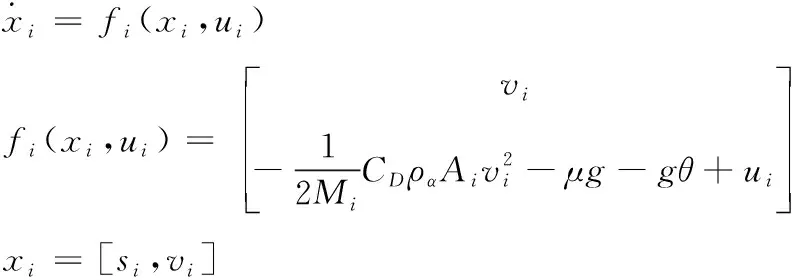
(1)
式中,xi为车队第i辆车的状态向量;ui为车队第i辆车的控制变量,是车辆的单位质量牵引力或制动力;vi为车队第i辆车的速度;Mi为车队第i辆车的质量;CD为车队第i辆车的迎风阻力系数;ρα为空气密度;Ai为车队第i辆车的迎风面积;μ为车辆的滚动阻力系数;g为重力加速度;θ为道路坡度。
车辆的功率平衡方程如下所示

(2)
式中Pireq为驱动需求功率。
以车辆单位距离的能量消耗最小值为目标,建立数学模型如下式(3)所示[13]

(3)

在求解最优目标车速时,需要基于SPaT获得的目标车速作为计算的初值,其表达式如下[14]
vimin≤viobj(td)≤vimax
tc=tg+tr
(4)
式中,viobj为车队第i辆车的目标车速;dia(td)为车队第i辆车与交通信号灯的距离;Kw为交通信号灯的循环次数,取整数;tc为一个红绿灯周期的时间;td为车辆行驶的时间;tg、tr分别为绿灯和红灯的持续时间。
分析式(4)可知,当信号灯发生变化时,目标车速也会发生相应的变化。当信号灯为绿灯时,若车速在不超过最大允许值的前提下可在绿灯持续时间内行驶过车辆与信号灯的距离,此时目标车速为车速最大值。当车辆不能在绿灯持续时间内通过信号灯路口,此时减速,经过一个红灯持续时间段的行驶,随后在下一个绿灯持续时间段内通过信号灯路口。若车辆减速后经过一个红灯持续时间段的行驶依然会提前到达信号路口,则会在路口停车,并在下一个绿灯时通过路口,这里发生停车的原因是因为设置了车速下限,此时目标车速需要按式(4)重新计算。
3.1.2 基于MPC的最优目标车速求解
网联车最优目标车速的求解是一个典型的多目标优化求解问题,求解时需要考虑汽车的油耗、车速跟随、控制变量、车与车之间的相对距离等相关因素的影响,本文用四者的加权之和构建目标函数。以单个车辆为对象,在时间段T内,汽车经过时间td的行驶后,车速最优化的目标函数可以用式(5)表达,该式的输出包括当前时刻车辆的目标车速及位置,车辆的状态变量为当前车辆的加减速度[15]。

(5)
δsi=si(td+T-1)-si(td)
Vim=vi(t)-viobj(td)
Sij=S0+thvi(t)-(sj(t)-si(t))
vimin≤vi(t)≤vimax
uimin≤ui(t)≤uimax
(6)
式(5)、(6)中,δsi为车队第i辆车在T时间段内的行驶距离;Vim为车队第i辆车当前车速与目标车速的差值;Sij为车队第i辆车和第j辆车的相对距离;si(t)和sj(t)分别为第i辆车和第j辆车在时间t时的位置;th为预设的前后两车的间隔时间;S0为预设的两车安全距离;wi(i=1,2,3,4)为加权系数。
车速最优化的目标函数式(5)中加权系数w1、w2、w3、w4分为对应的车辆油耗、车速、控制变量、前后车相对距离。当研究对象的目标车速范围较大,研究倾向于使车辆的燃油经济性最优而不是车速跟随效果更好时,此时w1取较大值而w2取较小值;当研究对象的目标车速范围变化较小,研究倾向于使车辆的车速跟随效果更好而不是燃油经济性最优时,此时w2取较大值而w1取较小值。当前后车相对距离增加时,w4取值较小,反之,w4取值较大。w3取常数值。目标车速的取值范围对车速最优化的求解有两个方面的影响,一是影响加权系数w1和w2的取值,二是当车辆的实际车速与最优目标车速差距太大时,通过取值范围限制将车速变化限制在规定的区间里,避免在交叉口遇到红灯停车。
上述优化问题不仅要满足式(6)的约束,还要满足式(1)动力学方程的约束。值得注意的是,上一小节基于SPaT求解目标车速的目的是避免在路口停车,没有考虑车辆的燃油经济性,而本小节求解的最优目标车速综合考虑了车辆燃油经济性、车速跟随以及前后车跟车距离。
3.2 非网联车的目标车速求解
如图2所示,当检测到道路上行驶的车辆是非网联车时,采用GIPPS跟车理论进行速度控制。输入包括瞬时速度与位置、交通信号的定时信息以及前车的速度和位置信息。GIPPS跟车理论公式如下式(7)所示[16]。

(7)
式中ai为车队第i辆车的最大加速度;bi为车队第i辆车的最小加速度;Vi为车队第i辆车的期望车速;τ为时间间隔;si(t)为车队第i辆车在t时刻的位置;li-1为车队第i-1辆车的车身长度;b为理想的制动减速度。
4 能耗控制器
能耗控制器利用接收到的目标车速计算加速和减速信息,进而对电机与发动机进行最优功率分配。混合动力汽车的能耗控制器的控制策略有很多,例如基于规则的、基于优化算法的、基于工况等多种,本文选用基于变等效因子的等效燃油消耗最小策略。
等效燃油消耗最小策略是基于启发式经验提出并被应用于混合动力汽车的控制系统,其核心将发动机燃油消耗和电能消耗归结为统一的能耗指标,从而解决能量的实时最优分配,理论可以用式(8)描述[17]:
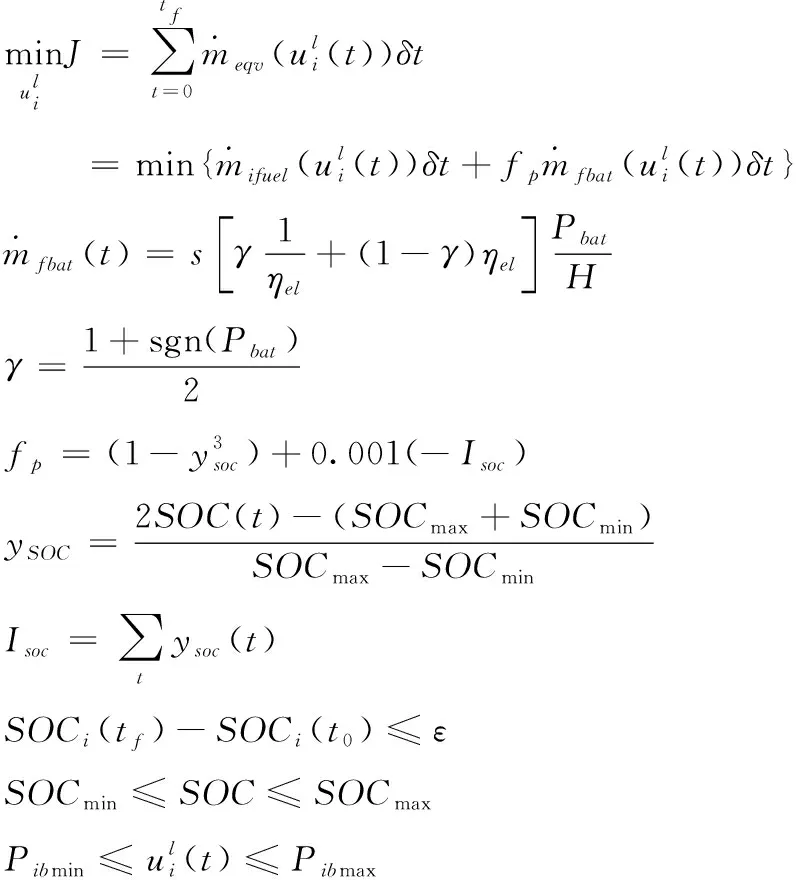
(8)

等效燃油消耗最小策略中的等效因子s是定值,通过计算协态变量获得,但是定等效因子对工况的适应性很差,所以需要设计一个变等效因子以满足不同工况的需求。本文采用线性迭代的方法计算变等效因子,其表达式如下式。
s(t+1)=0.5(s(t)+s(t-1))+cp(SOC(t0)-SOC(tf))
(9)
上式中,cp为迭代步长。
5 硬件在环仿真结果与分析
5.1 硬件在环仿真设置
本文仿真采用塔式工作站(戴尔T7920,处理器36核,2颗至强金牌5220,运行内存64G)来计算目标车速控制器中网联与非网联车的车速,将仿真得到的车速保存为数据格式并将其用于能耗控制器的离线仿真。离线仿真为dSPACE硬件在环仿真,仿真时间设置为400s,仿真系统如图3所示。

图3 硬件在环仿真系统
利用VISSIM和MATLAB建立联合仿真平台。在软件仿真程序中,对微观仿真环境进行如下设计:测试网络是一个假设的路口,如图1所示;在仿真中不允许换道和转弯行为。VISSIM模拟交通并为MATLAB控制算法生成输入,仿真过程中使用的参数如表2所示。
表2 仿真参数
5.2 硬件在环仿真结果
本文在中、高及过饱和车流量工况下进行了仿真分析。当车流量低于400 veh/h时,为低车流量工况,当车流量为400 veh/h~1000 veh/h时,为中高车流量工况,当车流量高于1000 veh/h时,为过饱和车流量工况。
当道路上的车流量为600 veh/h时,网联率从0以10%为间隔递增到100%时,车辆在信号路口的典型通行轨迹情况如图4-图9所示,车辆的燃油经济性如表3所示。
图4和图9分别是0网联车与100%网联车的通行轨迹,都没有发生轨迹相交的情况,并且图9中网联车通过路口时没有停车,说明设计的车辆分层控制系统可以很好的适应全网联环境,同时也可以保证全非网联车环境下的通行安全性。图5和图6分别是网联率30%和50%时车辆的通行轨迹,可以看出其中都发生了停车的情况。图7和图8分别是是网联率60%和70%时车辆的通行轨迹,车辆在通过路口时都没有发生停车。综合图4至图9,可以看出,不论网联率如何变化,车辆都可以安全的通过路口,说明当前设计的车辆控制系统是合理的,可以满足不同网联率情况下车队在道路上的安全行驶,同时网联率大于等于60%时,可以实现车辆在信号灯交叉口不停车通行。
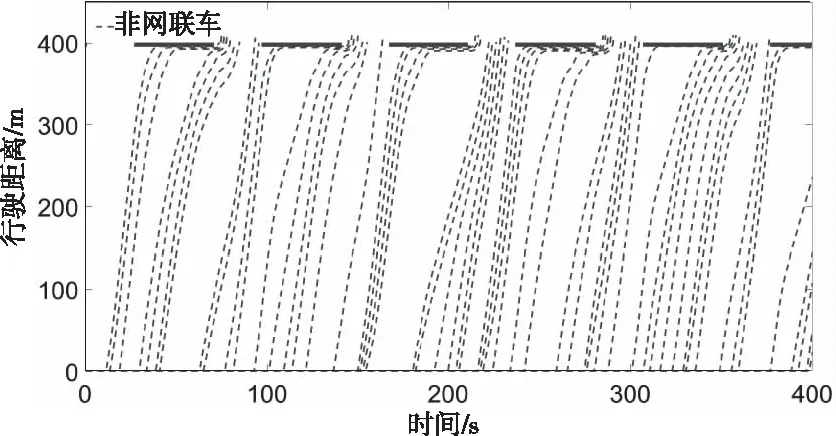
图4 0网联率的通行轨迹
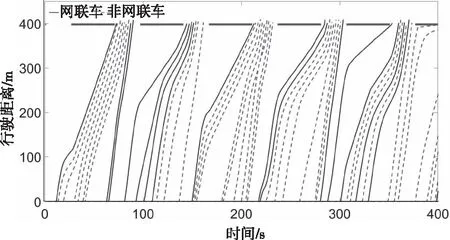
图5 30%网联率的通行轨迹

图6 50%网联率的通行轨迹

图7 60%网联率的通行轨迹
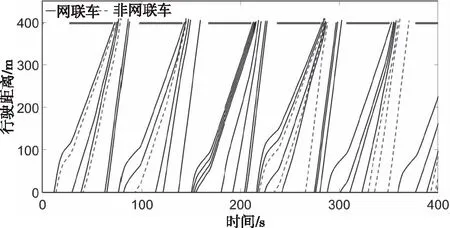
图8 70%网联率的通行轨迹
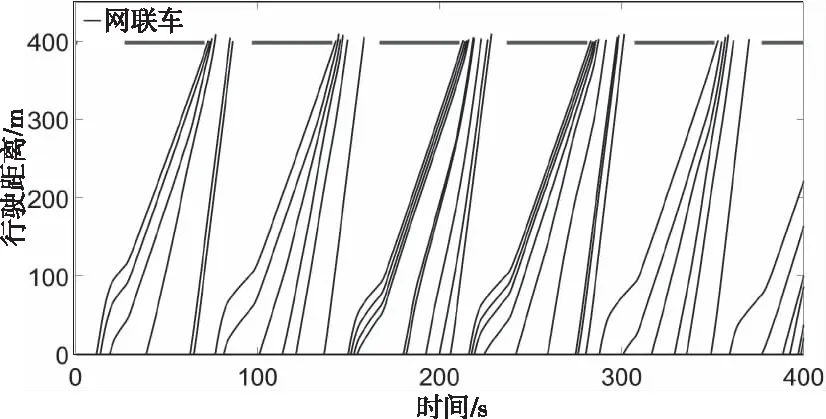
图9 100%网联率的通行轨迹
表3是当车流量为600 veh/h时不同网联率时车辆的燃油经济性。分析可知,网联率在0到60%之间时,网联率每提升10%,经济性平均提高5.2%,而网联率从60%提高到100%时,经济性平均提高0.49%。随着网联率的增加,车辆的百公里油耗呈现下降的趋势,但网联率高于60%时,车辆的百公里油耗趋于稳定。经济性提升的结果表明,当道路上只要存在网联车,采用该分层控制器就可以改善车辆的燃油经济性,当网联率高于60%以后,再继续增加车辆的网联率,车辆的燃油经济性的提升效果不够显著。
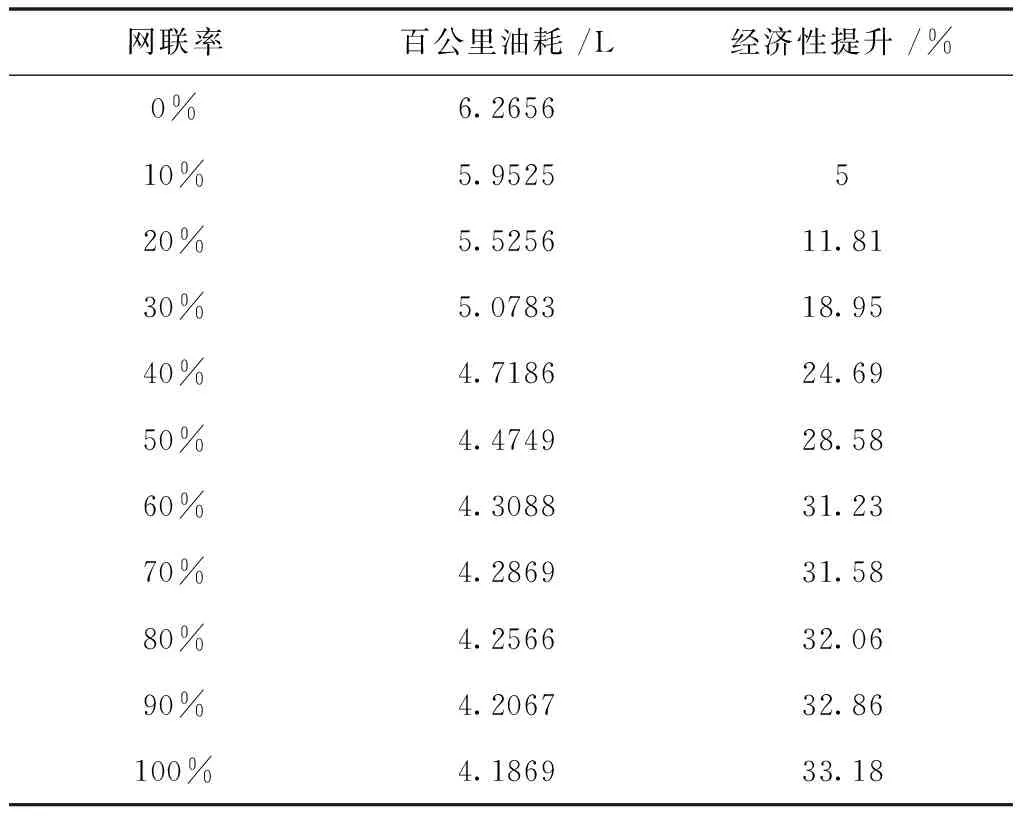
表3 不同网联率下的燃油经济性

图10 不同车流量条件下燃油经济性
为了检验本文设计的分层控制器对其车流量的是否有相同的效果,对900 veh/h与1200 veh/h的车流量进行了实验,其燃油经济性及提升结果与600 veh/h的车流量对比如图10与图11所示。在车流量900 veh/h时,网联率为60%和100%时,经济性分别提升了33.12%和35.27%,网联率在0到60%之间时,网联率每提升10%,经济性平均提高5.52%,而网联率从60%提高到100%时,经济性平均提高0.54%;在车流量1200 veh/h时,网联率为60%和100%时,经济性分别提升了37.7%和40.12%,网联率在0到60%之间时,网联率每提升10%,经济性平均提高6.35%,而网联率从60%提高到100%时,经济性平均提高0.5%。综合不同流量下的燃油经济性分析结果可知,网联率60%是车辆的经济性提升的拐点。网联率相同的条件下,道路上车流量由600 veh/h增加到1200 veh/h时,车辆的百公里油耗增加,经济性提升的幅度也更大,这说明本文的分层控制器对大车流量的经济性的改善效果好于小车流量。
与文献[9]中的最优化控制方法对比如下图12所示,在网联率低于30%时,文献[9]经济性提升比本文方法略好,而网联率高于30%时,采用本文方法经济性提升效果好于文献[9]方法。

图12 经济性提升对比
6 结论
本文提出了一个部分车辆联网环境下的信号灯路口的分层控制器。在不同车流量的工况下,车辆采用该分层控制器能安全通过信号灯路口。当网联率高于60%时,车辆能够在绿灯窗口时间完成通过路口。
随着网联率的提升,车辆的燃油经济性显著改善,网联率60%是经济性提升的拐点。在此基础上,网联率的提升对经济性改善效果趋于稳定,并且本文设计的分层控制器对大流量工况的经济性改善效果更优。
