带陀螺阻尼器的起重机吊重防摆控制装置研究*
2022-01-27焦宏涛吴立仁
焦宏涛,吴立仁,董 芳
(1.郑州铁路职业技术学院 机电工程系,河南 郑州 451460;2.河南理工大学 机械与动力工程学院,河南 焦作 454002)
0 引 言
目前,起重机已在建筑、配送和制造等各种领域得到广泛的应用。
悬挂在起重机吊钩上的材料或产品称为悬挂载荷或者吊重[1,2]。悬挂载荷通过起重机操作员的操作而上下左右移动。但吊钩是自由旋转机构,缺乏旋转动力装置,这意味着受强风力的影响,吊钩下的悬挂载荷会发生旋转[3-5],这对起重机高空作业来说是极其危险的。当悬挂载荷受风力等干扰而向非预期的方向旋转时,由于巨大的惯性,仅靠速度控制摆动是不足以将其停止在目标位置的。
目前,为了控制起重机吊钩的悬荷(吊载)摆动,研究人员已经进行了大量研究。SUKSABAI N等人[6]提出了一种聚焦外力的前馈控制方法,该方法仅需测量桥式起重机的固有频率,即可控制起重机吊钩的悬荷摆动,且其幅值较小,不易被察觉。此外,潘凌云等人[7]采用输入整形方法,对起重机系统吊重的防回转进行了控制。王华荣等人[8]采用粒子群优化的模糊PID控制器,对桥式起重机的吊重进行了防摆控制,有效缩减了悬挂载荷摆角的消除时间。
然而,上述方法都是利用吊摆系统模型,在控制算法方面对其进行优化,没有涉及起重机悬挂载荷机械结构方面的改进。此外,现有方法均没有考虑风力等扰动,因此,当存在风力干扰时,悬浮载荷的摆动抑制性能会显著降低,无法实现起重机悬挂载荷高精度的静止定位。
另一方面,各种关于机械陀螺的研究结果表明,陀螺阻尼器在稳定控制方面具有较好的有效性。例如,ZHAO Zhan-zhan等人[9]使用陀螺仪来控制航天器姿态,并对各种控制方法进行了研究。LEMUS D等人[10]基于控制力矩陀螺仪,提出了一种可穿戴平衡辅助装置。
这些研究大多是基于机械陀螺特性的主动控制。在这种主动控制方式中,机械陀螺的万向节机构需要一台大容量的飞轮摆动电机,这会导致装置的整体重量和尺寸都大幅增加。
为了解决上述问题,笔者设计一种新型的起重机悬挂载荷的防摆控制装置。首先,笔者对单轴机械陀螺垂直轴周围,由短期扰动产生的大扭矩被动控制特性进行研究,然后通过伺服电机将悬挂载荷旋转到任何位置,并利用上述被动控制来抑制悬挂载荷旋转时产生的反作用力矩;为了缩短由于陀螺仪效应导致的飞轮倾斜角的偏移时间,采用陀螺阻尼器对垂直轴悬挂载荷的抗旋转进行控制,以提高该装置的性能,缩减飞轮倾斜角的偏移时间。
1 悬挂载荷防摆控制装置设计
笔者所提出的悬挂载荷防摆控制装置的设计原理,如图1所示。

图1 防摆控制装置的设计原理
图1中,该防摆控制装置适用于带滑轮的起重机,可通过连接部件直接连接到顶部的起重机吊钩上。起重机吊钩一般具有可旋转的结构,包括一个绕垂直轴的轴承。此外,悬挂载荷附着在该装置的吊钩上。
该装置的基本原理是通过伺服电机将悬挂载荷旋转到任何位置,并由机械陀螺仪被动控制产生回转力矩,来抑制在加速、减速时挂载荷旋施加给装置本身的反作用力矩。
陀螺阻尼器的原理如图2所示。
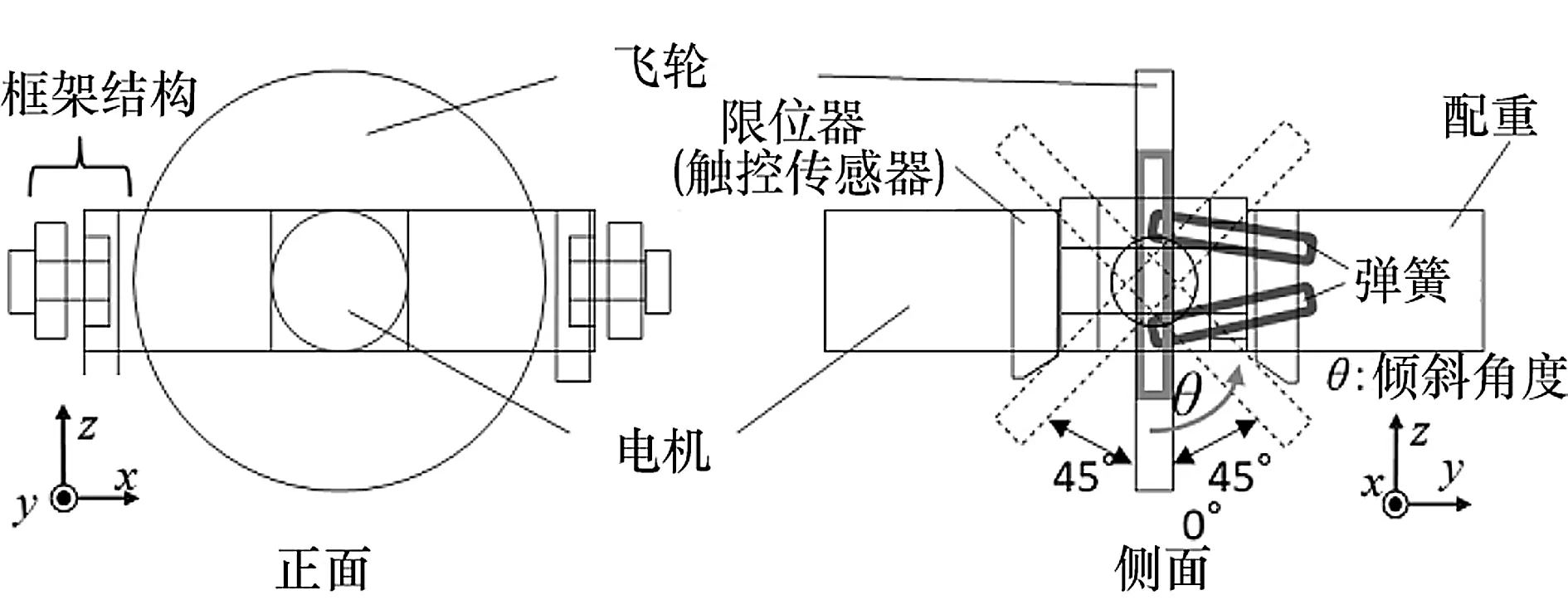
图2 陀螺阻尼器的原理
图2中,一个能够高速旋转的电机连接到飞轮的中心,笔者在飞轮的相对侧设置一个配重,以便将重心放在机械陀螺仪[11]的中心;飞轮的两侧有一个万向节结构[12,13],两端由轴承支撑,允许在x轴旋转方向自由旋转;飞轮有一个连接在万向节上的限位器,这样它可以在45°范围内绕x轴旋转。
这种万向节结构可以防止飞轮的倾斜超过上述范围,减小陀螺效应。但因为飞轮的可动范围有限,所以飞轮倾斜角恢复到原来的0°需要一定时间。
从图1、图2可以看出:当悬挂载荷旋转或停止时,几秒钟的反作用力矩作用于装置本身。此时,由于机械陀螺的特点,飞轮会因短时间输入的瞬时角速度而倾斜大约±10°。在陀螺效应的作用下,飞轮试图返回到初始位置时产生的陀螺力矩可以抑制悬挂载荷旋转反作用力矩。这意味着飞轮倾斜角需要几十秒钟才能完全回到原来的位置。
因此,笔者设计了一种机构,即通过将弹簧连接到万向架结构的两侧,来缩短飞轮的偏移时间。此时需要注意的是,如果弹簧刚度过大,飞轮倾斜时产生的角速度会降低;相反,如果弹簧刚度过小,则其效果将与没有弹簧的情况相同。因此,有必要选择一种合适的弹簧,来有效缩短偏移的时间。
此外,当风力等连续扰动施加到机械陀螺仪时,飞轮倾斜进一步增加±45°,陀螺效应大大降低。此时,飞轮需要几分钟才能偏移。考虑到上述问题,笔者从两个方面对该装置进行改进,以便在短时间内补偿飞轮倾斜角。
风力控制的流程如图3所示。

图3 风力控制的流程
在图1和图3中,该控制装置的内部都安装有一个陀螺仪传感器,可以测量绕垂直轴的角速度。
从图2和图3可以看出:当机械陀螺仪倾斜±45°时,触控传感器会作出响应,并以此作为触发器来激活控制;当绕垂直轴的角速度达到0°/s时,风机停止运转。
需要注意的是,如果只使用风机,悬挂载荷会因惯性而移动,导致其在0°/s附近反复振荡运行。
在本研究中,风机和陀螺阻尼器结合在一起进行控制,因此风机在达到0°/s后会停止,而随后悬挂载荷会因陀螺阻尼器的陀螺力矩而停止。
2 装置建模
悬挂载荷防摆控制装置的物理分析模型如图4所示。

图4 悬挂载荷防摆控制装置的物理分析模型2a—装置吊钩的宽度;2b—悬挂在悬挂载荷上的宽度;H—装置吊钩与悬挂载荷之间的垂直距离
由图4可见,该装置使用两个起重工具分配和悬挂载荷。
转速目标值输入信号如图5所示。

图5 转速目标值输入信号
当按下输入旋转操作按钮时,角速度在t0(从0~t0)的加速时间内达到N0,并且保持该角速度进行旋转;当松开操作按钮后,t0减速时间(t1~t1+t0)后,装置吊钩停止。
(1)
陀螺力矩M可表示为:
(2)

设ψ为装置吊钩与悬挂载荷之间的相对旋转角,且φ为装置本身的绝对旋转角,则悬挂载荷的绝对旋转角为ψ+ψ0+φ。
悬挂载荷绕垂直轴的运动方程为:
(3)
式中:I1—围绕悬挂载荷垂直轴的惯性矩;c1—起重工具的阻尼系数;k1—起重工具的弹簧系数。
相对旋转角ψ的计算方式如下:
(4)

笔者对该装置机械陀螺阻尼器的物理模型进行分析。
从陀螺阻尼器侧面(图2)看,围绕倾斜轴的运动方程为:
(5)

该装置的运动方程可表示为:
(6)
式中:I3—绕装置垂直轴的转动惯量;μ—吊车吊钩绕垂直轴的摩擦系数;T—悬挂载荷转动反力矩;Tw—风力产生的扭矩。
转动反力矩T的计算公式为:
(7)
根据式(5~7),可得出:
(8)
则φ可表示为:
(9)
根据式(4)和式(9),可以得到防摆控制装置的控制框图,如图6所示。

图6 防摆控制装置的控制框图
3 实验与结果分析
3.1 实验设置
为了验证陀螺阻尼器抑制风力的有效性,笔者对所提防摆控制装置进行了实验。
防摆控制装置的参数如表1所示。

表1 防摆控制装置的参数
笔者利用陀螺传感器[16](安装在配重的位置上)测量了悬挂载荷的旋转角,以及飞轮倾斜时产生的角速度和倾斜角。
陀螺仪传感器的参数如表2所示。

表2 陀螺仪传感器的参数
在被动控制和非被动控制条件下,为了验证陀螺阻尼器的旋转性能,笔者对该装置进行了实验。
实验条件如下:
目标旋转角度为100°,当按下输入旋转操作按钮时,悬挂载荷的旋转速度在1 s的加速时间达到1 r/min;当操作按钮释放时,装置吊钩在减速时间1 s后停止;
悬挂载荷为长3 500 mm、宽400 mm、重350 kg的钢板。
实验条件及实验装置如图7所示。

图7 实验条件及装置
3.2 防摆控制装置的验证
笔者用陀螺仪传感器测量悬挂载荷围绕垂直轴的旋转角度。
旋转角度如图8所示。

图8 旋转角度
从图8可以看出:在没有控制的情况下,转动时的反作用力矩和停止时的惯性力矩不能被抑制,悬挂载荷就会无意识地移动;如果有控制,转动时的反作用力矩和惯性力矩可以被抑制,目标旋转角度达到100°左右就会停止;虽然在装置吊钩下围绕起重工具的垂直轴产生残余振动,但没有看到装置本身的振动,且在60 s左右完全收敛。
如上所述,防摆控制装置采用陀螺阻尼器进行被动控制,可以有效地抑制旋转时的反作用力矩和停止时的惯性力矩,并且其达到了目标旋转角度,验证了该防摆控制装置的有效性。
3.3 陀螺阻尼器的验证
在上述实验的相同条件下,笔者针对有和没有机械陀螺仪弹簧的情况进行了测量(如果有弹簧,即为陀螺阻尼器)。
在带弹簧和无弹簧的情况下,飞轮的倾斜角度如图9所示。

图9 飞轮的倾斜角度
从图9可以看出:在两种情况下,0~20 s的倾斜角度特性几乎相同;但是,当没有弹簧时,飞轮的最大倾斜角度约为19°,而带弹簧时,飞轮倾斜角度相对较小,仅约为14°,相比无弹簧时减小了5°。
需重点关注的是:飞轮倾斜角度在20 s后由陀螺效应回到0°的情况。在无弹簧的情况下,大约需要40 s才能返回到0°。另一方面,当带弹簧时,在大约23 s内返回到0°。
从这个结果可以看出,两者相比,带弹簧时可以减少17 s。也就是说,通过增加弹簧,可以抑制飞轮的最大倾斜角度,缩短回零前的偏移时间,偏移时间缩短了43%。
两种情况下,飞轮倾斜时的角速度如图10所示。

图10 飞轮倾斜时的角速度
从图10可以看出,飞轮倾斜时的角速度几乎相同,这与式(2)所得结果相同,即陀螺力矩与飞轮倾斜时的角速度成正比。因此,加弹簧后对装置工作效率产生不利影响。
由此证实,陀螺阻尼器实现了相同的最大陀螺力矩,减少了飞轮倾角的偏移时间,其有效性得到了验证。
3.4 风力控制验证
在风力控制验证实验中,其悬挂载荷的条件与防摆控制装置验证实验时相同。一般情况下,在10 m/s的风速下,悬挂载荷是静止不动的。因此,在此处的实验条件下,笔者在悬挂载荷的顶端施加对应于20 m/s风速的扰动力矩(扰动力矩值13 Nm)。此时,通过手动推动并释放悬挂载荷,直至飞轮达到45°倾斜角,并接触到触控传感器。
在有风机和无风机时,悬挂载荷的旋转角如图11所示。

图11 有风机和无风机时悬挂载荷的旋转角
从图11可以看出:当没有风机时,陀螺力矩在10 s后消失,悬挂载荷和装置一起旋转,并且大约在95 s时收敛。这是因为在陀螺力矩下降后,起重机吊钩旋转,悬挂载荷和装置一起旋转);之后,由于起重机吊钩存在摩擦力,悬挂载荷的旋转逐渐收敛。此外,飞轮倾斜度逐渐被陀螺效应抵消;最后,陀螺力矩起工作,悬挂载荷停止摆动;
另一方面,在风机的风力作用下,飞轮倾斜度变为45°,此时的防摆控制装置起作用;然后,在5 s之后,悬挂载荷绕垂直轴旋转的角速度变为0,可以看到悬挂载荷停止摆动。由此可见,陀螺阻尼器可以效地抑制悬挂载荷的惯性力矩,直到悬挂载荷停止摆动。
上述结果表明:与无风机控制的情况相比,在有风机控制的情况下,悬挂载荷停止摆动所需的时间减少了90%,该结果验证了风机风力控制的有效性。
4 结束语
本研究通过在机械陀螺仪中添加弹簧,构建起了一种陀螺阻尼器,并结合风力的调节作用,实现了对起重机吊重的防摆控制;通过真实测试,验证了该装置的有效性。
研究结果表明:
(1)针对单轴陀螺阻尼器的被动控制特性,提出了一种悬挂载荷防摆控制的概念,通过在框架结构侧面增加带弹簧的陀螺阻尼器,能够使飞轮倾斜返回时间减少43%;
(2)根据陀螺力矩因连续扰动而消失的特点,提出了利用风力控制悬挂载荷姿态的新方法,通过风力对悬挂载荷受扰动旋转的抑制作用实验,结果表明,该方法可以使悬挂载荷停止所需的时间减少90%。
由于该装置是被动控制,笔者仅增加一个弹簧而不是电机,节省了空间,从而使装置的体积更小、重量更轻。该装置可通过无线遥控的方式,将悬挂载荷旋转到任意位置,以确保安全性和工作效率,即使不熟悉起重机的人也能够轻松操作。
在后续研究中,笔者将使用更多类型的吊重物,对该悬挂载荷防摆控制装置做进一步的可靠性验证。
