基于开环补偿与鲁棒控制的电液位置伺服加载系统研究*
2022-01-27梅鲁海刘哲纬
梅鲁海,刘哲纬
(浙江机电职业技术学院 自动化学院,浙江 杭州 310053)
0 引 言
电液伺服控制系统在机械、交通、电气和军工等领域都有普遍的应用,而位置伺服系统是电液伺服控制的重要组成部分。
一般的位置控制方式有:PID闭环控制、模糊控制、自适应控制和滑模变结构控制等。位置控制技术一般包括动态模型建立、参数识别、控制系统仿真、优化控制算法、协同控制设计等。在通常的情况下,电液伺服系统不需要预先进行迭代辨识[1]。因为系统模态和参数是已知量,由此可以直接进行动态模型的创立和各种控制器设计。然而,一般的电液伺服系统的位置控制往往需要面对负载扰动和非线性参数等问题,且参数的波动往往是大范围和不确定的,这时用传统的闭环PID控制策略或扰动补偿方法往往难以奏效。
目前,针对上述问题的解决办法中,比较先进的是采用鲁棒模型预测控制器设计、粒子群模糊逻辑控制器设计或进行离散滑模控制算法等。这样,在被控对象的非线性扰动大幅变化时,采用这些技术的电液伺服系统仍可以自动保持最佳的工作状态、稳态精度与动态品质。
为此,笔者搭建一套较为完整的电液伺服加载试验台系统,建立试验台系统的数学模型,提出抑制扰动的开环补偿方法,对期望轨迹规划的位置开环补偿控制方法进行分析,对位置伺服控制器的模型进行论证。
1 试验台系统结构与数学模型
1.1 系统结构
笔者研究的电液伺服试验台系统的结构图如图1所示。
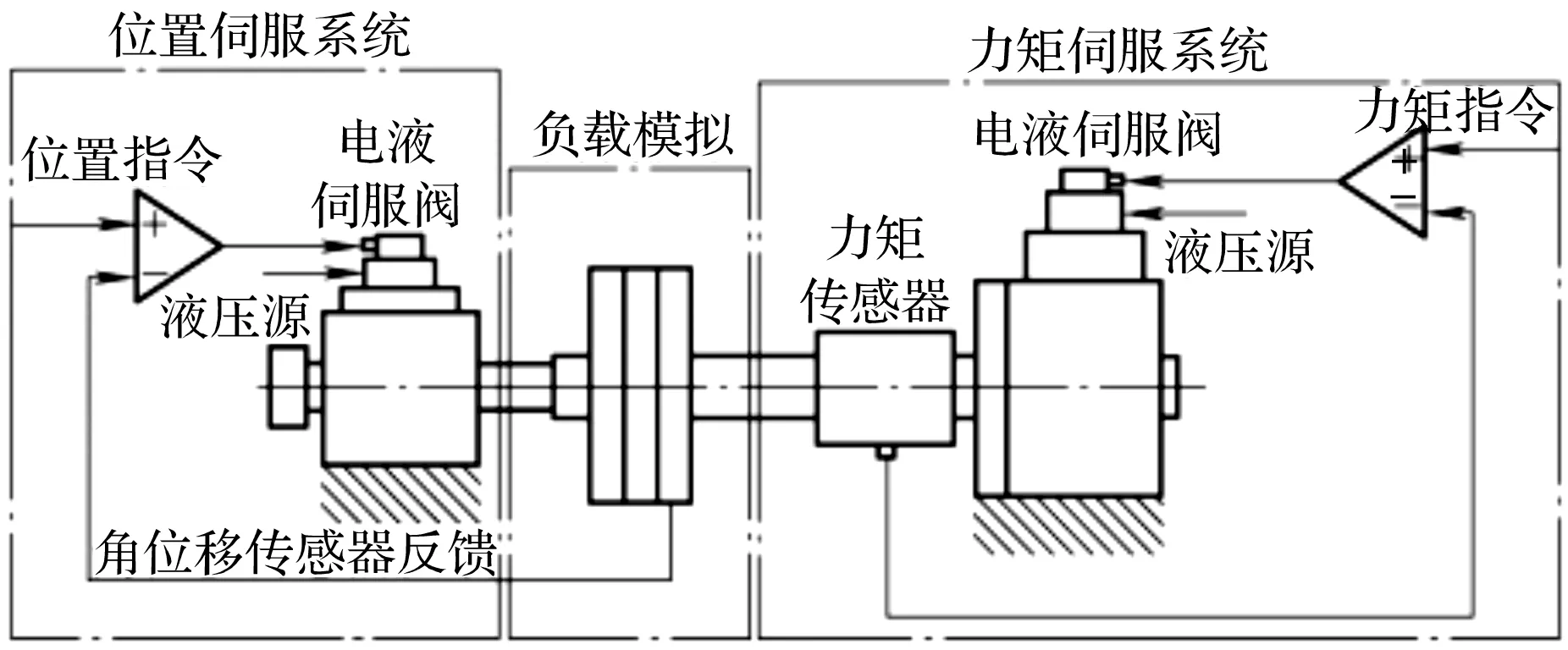
图1 电液伺服加载系统试验台
由图1可知:电液伺服阀通过驱动伺服马达进行系统加载,加载试验包括位置伺服和力矩伺服试验。
此处的外负载扰动通过力矩伺服系统来提供。其中,力矩闭环时的力矩反馈通过与马达轴固连的扭矩传感器来完成,而位移反馈通过角位移传感器来完成,控制算法系统由多个控制器来完成。
电液伺服加载系统试验台包括:1个油源、2个伺服阀、2个液压马达、2个力矩传感器、2个位置传感器,还包括工控机等测试系统。
电液伺服系统的主要参数如表1所示。
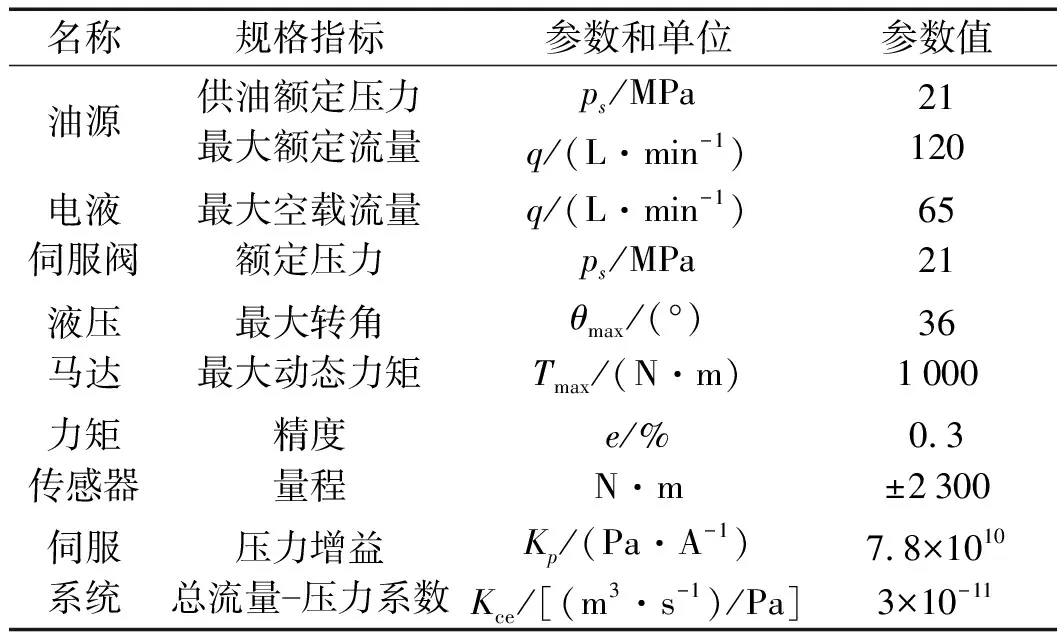
表1 电液伺服试验台系统主要参数
由于电液伺服系统动态模型的可靠性决定了系统的控制精度,为了抑制负载扰动,并实时预估非线性干扰的参数变化[2],此处的试验台采用了开环补偿控制器和鲁棒控制器的设计;同时,其与开环控制器并联,笔者又增加了一个闭环PID控制器,以大大提高控制系统的静态闭环精度,增加控制的稳定性。
1.2 数学模型
笔者参考图1中的结构图来建立电液伺服试验台各个部件的数学模型。其中,电液伺服阀的流量线性化方程为:
QL=KqXv-KcpL
(1)
式中:Xv—伺服阀的阀芯位移;QL—电液伺服阀送到液压电机的负载流量;Kc—流量压力系数;Kq—伺服阀的流量增益;pL—负载的压力。
系统的力矩平衡方程为:
(2)
式中:M—系统的输出力矩;θi—负载的等效角位移;J—负载的转动惯量;G—负载的等效扭转刚度;BM—负载的等效阻尼系数[3]。
对式(1,2)进行拉普拉斯变换可得:
Isv=Kiuc
(3)
QL=KqXv-KcpL
(4)
M=pLDM=Js2θi+BMsθi+Gθi=
Gs(θM-θi)
(5)
参照该电液伺服加载系统的工作原理,可以将其中的伺服阀化简,变为一阶惯性环节,即:
(6)
式中:Ksv—伺服阀的增益;Ts—伺服阀的时间常数[4]。
2 开环补偿方法和位置伺服控制器模型
2.1 无扰动时的系统理论模型
假设电液伺服加载试验台系统无外界扰动时的理论模型为R(s),那么控制器Gθ(s)的设计就要考虑有外界扰动时的系统理论模型。
此处,控制器Gθ(s)实际上包括开环控制器和PID闭环控制器两种类型,如图2所示。
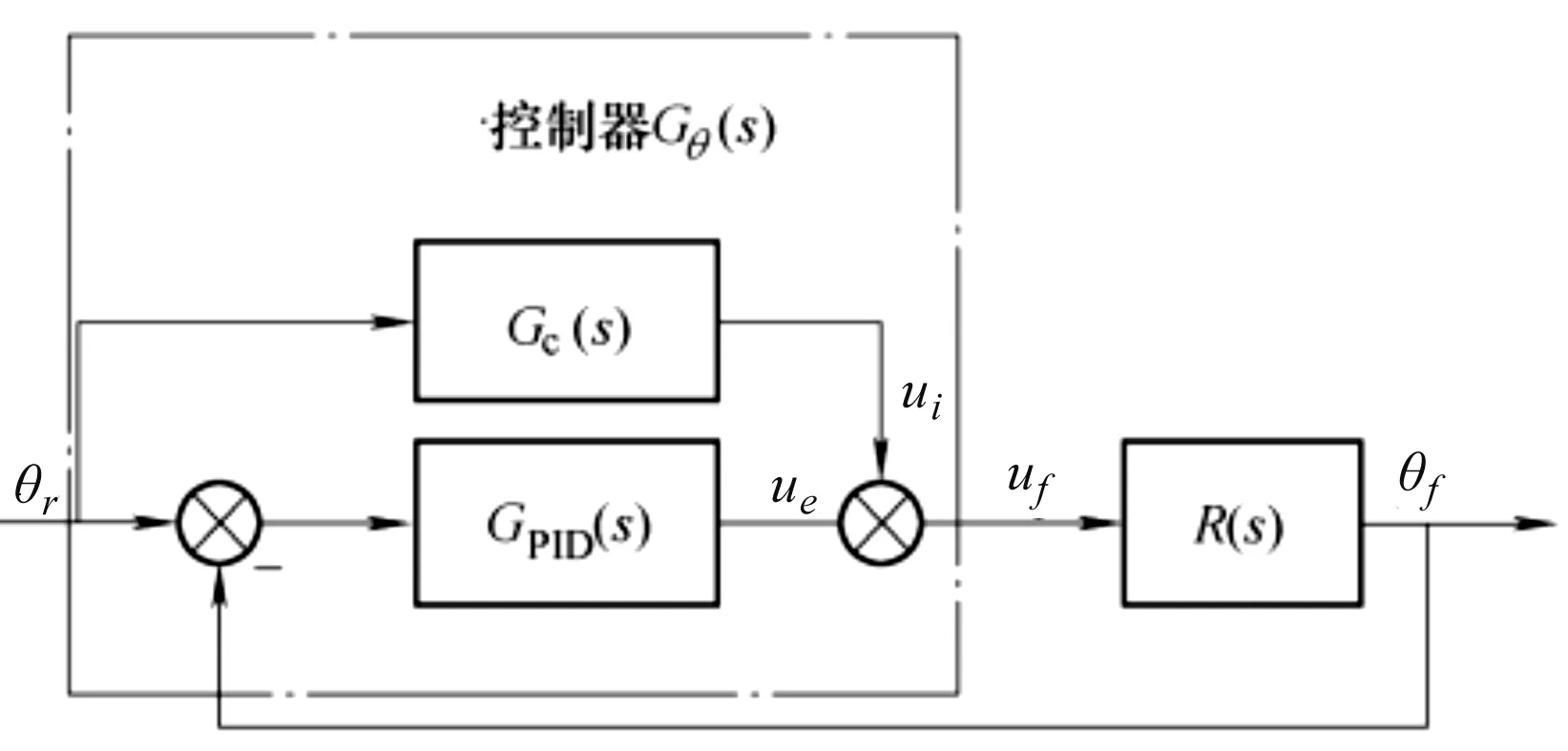
图2 无扰动时的系统模型
由图2可知,控制器Gθ(s)的控制输出为:
uf=GPID(s)e(s)+Gc(s)θr
(7)
式中:Gc(s)—开环控制器。
开环控制器Gc(s)的表达式为:
(8)
因为在一个真实的系统中,并不能获得绝对准确的理论模型R(s),所有理论模型及其模型辨识都只是一种近似的数学表达而已。
可以看出,开环控制器Gc(s)的表达式正是系统无扰动时的近似理论模型。另一方面,因为大部分模型分母的阶次都大于分子的阶次,一般系统模型都有很强的微分功能,这就可能增大噪声干扰的作用,所以,该开环控制器的设计采用无扰动时的系统近似理论模型[5]。
2.2 开环补偿控制方法
因为该电液伺服加载试验台对动态响应的要求较高,而伺服电机本身的数学模型简单,控制性能也较好,因此,解决系统扰动的问题需考虑整体控制环路的设计。
因为负载的扰动会引起位置伺服系统的调整,这又会直接体现在伺服电机的调速作用上,所以关键是如何提高调速模块抗扰动的能力。因此,位置伺服系统和调速系统都采用了自适应鲁棒控制的方法[6]。
电液伺服加载试验台的系统参数有非线性的特点,外界的随机扰动也会降低系统的控制精度和响应速度。为解决这个问题,笔者在位置伺服的开环控制中采用了一种依据期望轨迹规划曲线进行速度补偿的方法,期望轨迹规划曲线图如图3所示。

图3 期望轨迹规划曲线图
由图3可知:依照实际的位置运动状态、速度和方向,整个运动过程可分为加速段、匀速段和减速段3个阶段,并可以计算出所需要运动段的特征角点[7]。
为了保证系统的稳态品质和高精度输出,此处参照负载扰动引起的系统流量变化。这种位置开环补偿控制方法是以期望轨迹规划的速度作为一种中间控制变量,并去实时补偿伺服电机的转速数值。
该补偿控制的数学模型为:
(9)
式中:ωm—伺服电机的转速补偿,rad/s;Vref—期望转速,rad/s。
伺服电机的转速补偿需要根据调速模块的参数调整来进行,这种速度开环补偿方法对非线性和不确定的负载扰动具有一种自适应的特性,没有必要提前去辨识扰动的特征[8]。
图1中的电液伺服试验台系统中,其中的位置伺服系统在位置控制过程中,采用了一种开环补偿的控制方法,根据位置输出的偏差值进行闭环方式的反馈控制。
试验台的位置伺服系统及开环补偿控制图如图4所示。
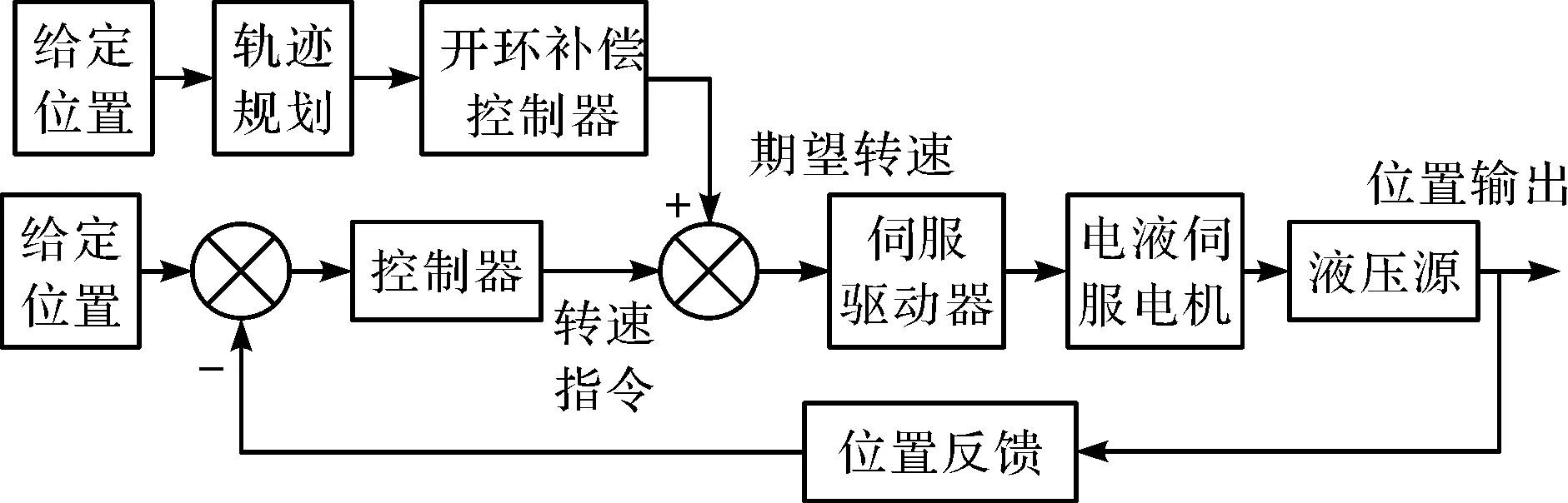
图4 试验台位置伺服系统及开环补偿控制图
在系统位置开环补偿的过程中,笔者参照上述试验台组成结构、试验台部件的数学模型,以及上述位置伺服开环补偿原理,得出的伺服系统开环补偿的传递函数图如图5所示[9]。
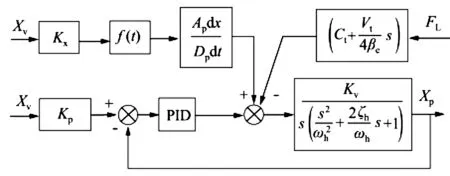
图5 开环补偿的传递函数图
图5中:由于系统中很多参数都具有随机性的特点,采用单一的开环补偿设计并不能完全满足整个系统的控制精度要求。为了提升控制效果,还需要并联设计一个经典的闭环PID控制器,以实现并行控制。控制器的参数可以采用临界比例度法进行获取。
闭环控制器可以对系统的位置进行基本的控制和调节;而开环补偿控制器则根据位移来规划系统的期望速度,以提高伺服系统的响应速度与控制精度为目标,准确地推算出伺服马达转速补偿的基准值,送出实时动态的速度调整参数,准确校正和改变实际曲线运动的速度值,并缩短稳态误差所用的时间[10]。
2.3 位置伺服控制器模型
该电液伺服加载试验台系统中,位置伺服的控制器的理论模型如图6所示。
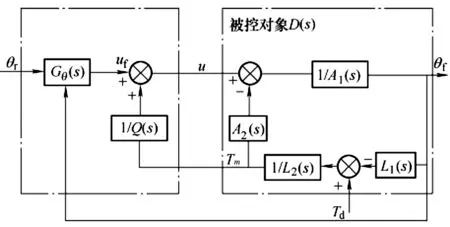
图6 电液位置伺服控制器模型被控对象—图4中的伺服驱动、伺服电机和液压源部分;Gθ(s)—图4中的位置控制器
图6的电液位置伺服控制器模型体现了试验台中位置伺服系统的工作原理。
(10)
如果控制器Gθ(s)采用闭环方式,则有:
(11)
并且有:
(12)
(13)
式中:ψ—系统抑制外扰动的能力指数。
控制器Gθ(s)设计的主要任务是尽量优化控制系统的模型A1(s)。
3 自适应鲁棒控制策略
在电液位置伺服加载试验台中,总压力流量系数Ktm和伺服阀的流量增益Ku是系统工作运行时最主要的非线性参数,控制器的设计需要计算这些参数值。
系统中的技术参数包括静态参数和动态参数两种。其中,静态参数通常是相对稳定的,而动态参数则是不确定的,并呈现非线性变化的特点。所以,为了稳定系统的技术性能指标,控制器的设计需要实时预估这些随机的非线性参数,并优先采取自适应控制和鲁棒控制的方法[12]。
在一般情况下,由于电液伺服阀具有比较宽的带宽,其动态描述可为比例环节。由此,其负载流量的方程可以写为:
qf=Kuu
(14)
(15)
(16)
其中:Kco可以由伺服阀空载的最大流量qo得出,即:
(17)
根据以上分析,可得该电液位置伺服加载系统的自适应鲁棒控制模型,如图7所示。

图7 电液位置伺服系统自适应鲁棒控制模型
由图7可知:控制模型具备在线和实时预测伺服系统的非线性参数的功能,因此,可以设计具有自适应特性的鲁棒控制器[13]。
4 电液伺服加载系统实验
4.1 实验条件
在电液伺服加载试验台中,为了验证采用位置伺服开环补偿鲁棒控制策略的有效性,笔者进行系统加载试验。
该试验采用与PID闭环控制方式进行跟踪曲线对比的方法。其中,系统测试的采样周期设为0.5 ms;力矩伺服系统用来提供外负载干扰。
试验台数据测控系统由AD采集卡、DA输出卡、计数器等组成;采用IEIWS-855GS工控机及相关程序进行数据的实时采集;位置指令信号通过相应的控制算法产生,驱动信号由信号调理电路和放大电路输出,控制电液伺服阀的运动。
4.2 位置跟踪实验(跟踪频率3 Hz)
在进行电液伺服系统性能加载对比试验时,笔者设定开环补偿鲁棒控制和PID闭环控制的已知参数相同。
在两种控制方式下,系统抗扰动的实验结果以及对比曲线,如图8所示[14]。
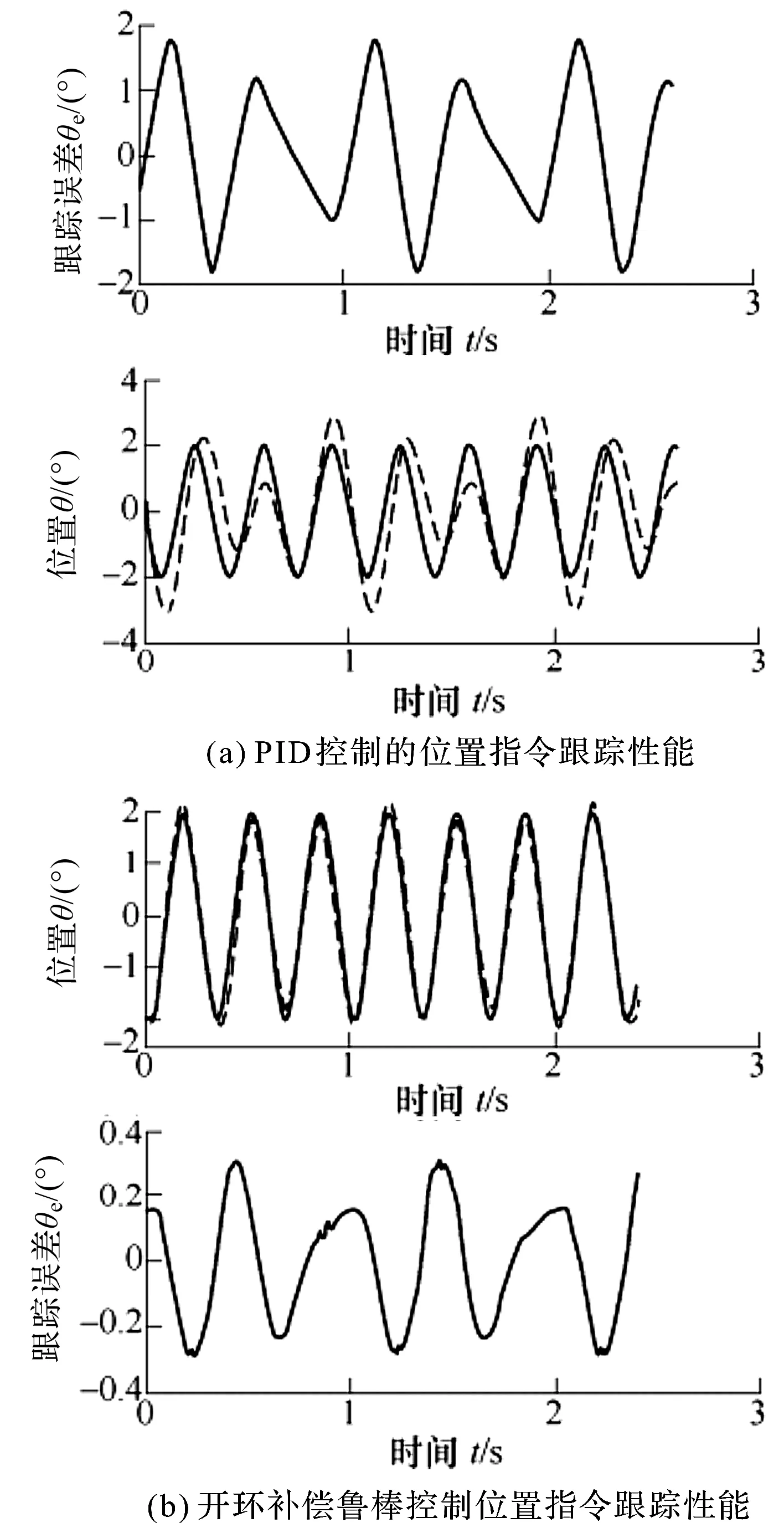
图8 电液伺服位置跟踪实验曲线比较(跟踪频率3 Hz)位置图中:实线—位置指令曲线;虚线—跟踪曲线
从图8可以看出:当电液位置伺服系统跟踪频率为3 Hz、幅值为2°的正弦波,系统实施加载力矩为1 000 N·m、加载频率为2 Hz的正弦干扰力矩时,如果采用PID闭环控制方式,扰动下的跟踪曲线显示已经无法实现位置指令的正常跟踪;如果采用开环补偿的鲁棒控制方式,伺服系统的位置跟踪能较成功地抑制非线性扰动因素,系统鲁棒性强,跟踪曲线的跟踪效果十分明显。
4.3 位置跟踪实验(跟踪频率20 Hz)
如果系统跟踪频率为20 Hz的正弦波时,其实验结果的对比特性曲线如图9所示。
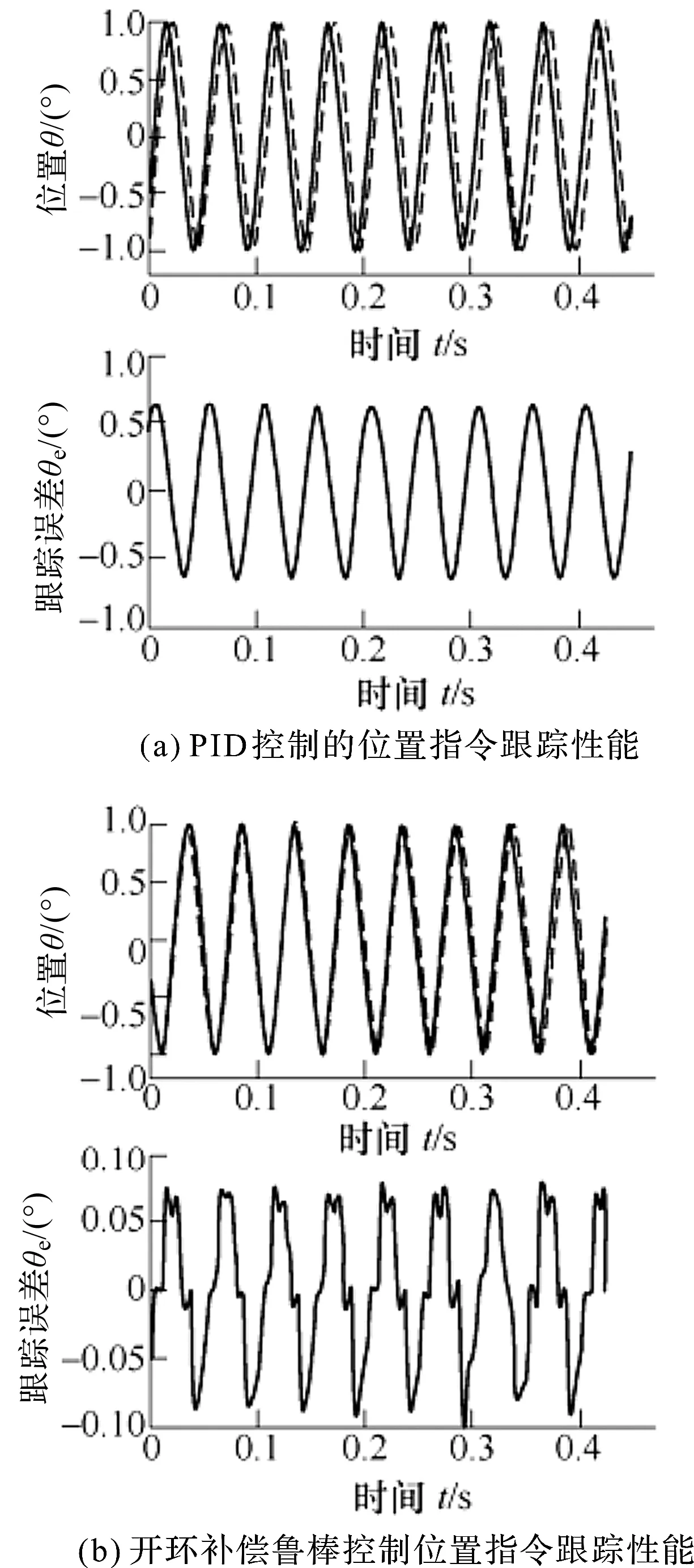
图9 电液伺服位置跟踪实验曲线比较(跟踪频率:20 Hz)位置图中:实线—位置指令曲线;虚线—跟踪曲线
图9中,当位置跟踪频率为20 Hz、幅值为1°的正弦波时,PID闭环控制方式存在一定的相位滞后现象,跟踪误差偏大,甚至超过了位置指令幅值的50%,可知高频下的位置跟踪性能较差;而采用开环补偿鲁棒控制方式的跟踪误差就很小,仅约占位置指令幅值的15%左右,因此,高频下位置跟踪性能较好。
4.4 系统“双十”频宽特性分析
该电液位置伺服系统的“双十”频宽是衡量系统频率响应的一个重要指标,即其频率响应曲线中能够同时满足输出幅值的衰减小于10%以及相位滞后10°的频率,这比一般伺服系统的-3 dB频宽和-90°相移频宽指标要严格得多。
在该试验中,用BT1250频率特性仪给电液位置伺服系统输入幅值为1°,同时频率逐渐增加的正弦信号,进行开环扫频,测量系统的开环频率响应,实验结果如图10所示。
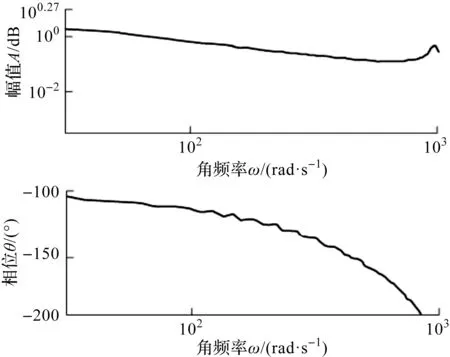
图10 系统开环频率响应图
一般伺服系统的-3 dB频宽都小于100 Hz,“双十”频宽基本小于30 Hz。从图10可以看出:在实验频率范围以内,该电液伺服系统大部分具有一阶环节的串联积分环节的特点,只有到了高频部分,才表现出更高阶次的一种模态。
实验结果表明:当位置跟踪频率为20 Hz、幅值为1°的正弦波时,在PID闭环策略下,系统的“双十”带宽只有6 Hz;而在开环补偿鲁棒控制方式下,系统的“双十”带宽可扩展到22 Hz[15]。
4.5 结果分析
笔者所提出的电液位置伺服开环补偿与鲁棒控制策略是基于系统模型的。由上述试验结果可以看出,位置跟踪误差小,低频和高频下跟踪性能均较好。
试验结果的主要理论依据是系统模型和参数预估策略是正确和有效的。由图7的系统模型可知,伺服控制器的总输出可根据系统参数和输出进行反推演算而得出。试验中,当位置跟踪频率为3 Hz、幅值为2°的正弦波,系统实施加载力矩为1 000 N·m、加载频率为2 Hz的正弦干扰力矩时,反推演算出的输出值特别接近位置伺服系统实际控制输出的值,误差大约只有0.1 V~0.2 V,这个误差只有系统最大输出值的约3%左右[16]。
由此可见,上述系统模型和在线参数预估的策略是合理和有效的。
5 结束语
针对电液伺服加载系统存在的负载扰动和非线性干扰问题,笔者提出了一种电液位置伺服加载系统的开环补偿与鲁棒控制解决方案;搭建了一套较为完整的电液伺服加载试验台系统,建立了试验台系统的数学模型,提出了抑制扰动的开环补偿方法,对期望轨迹规划的位置开环补偿控制方法进行了分析,对位置伺服控制器的模型进行论证。
为提高系统的动态响应品质,减小系统位置伺服的控制误差,通过运用并联PID闭环控制的复合型控制措施,实时校正实际运动曲线的速度值,在线预估伺服系统的非线性参数,并不需要对扰动的特性进行事先辨识;最后,笔者进行了位置伺服的加载实验。
研究结果表明:
(1)开环补偿和鲁棒控制策略的位置跟踪性能优良,跟踪曲线控制精度高;当跟踪频率为20 Hz时,跟踪误差只有位置指令幅值的15%左右;
(2)当位置跟踪频率为20 Hz时,开环补偿和鲁棒控制策略下,系统的“双十”频宽可扩展到22 Hz,频宽特性好;
(3)开环补偿与鲁棒控制策略可以明显增强电液伺服系统抗外界非线性扰动的能力,位置控制器的自适应能力大大优于传统闭环控制方式的电液伺服系统。
在该系统后续的研究工作中,笔者将加强对外部扰动因素进行量化分析和判断,从而进一步提升位置伺服系统跟踪的准确度,扩展“双十”频宽。
