抛射垂直度对四脉冲原子干涉仪性能影响分析
2022-01-15路想想赵小明裴栋梁刘为任
路想想,赵小明,刘 简,裴 闯,裴栋梁,刘为任
(1. 天津航海仪器研究所,天津 300131;2. 中国船舶集团有限公司航海保障技术实验室,天津 300131)
自从1991年朱棣文等人将原子干涉技术首次用于重力加速度的精密测量以来[1],基于原子干涉技术的惯性测量领域得到了迅猛发展[2-5]。由于原子干涉仪具有超高灵敏度、无长期漂移和不依赖GPS等显著优势,基于原子干涉技术的原子干涉陀螺仪在高精度惯性导航系统和基础物理研究等方面具有重要应用,成为了各国重点关注的研究对象[6-8]。
在上抛式四脉冲原子干涉仪中,需要将原子垂直抛射出去。当原子抛射方向和重力加速度存在一定夹角时,会降低探测到的原子数目和拉曼脉冲的跃迁效率,影响干涉条纹的信噪比和条纹对比度,并导致重力加速度耦合到转动引起的相移中,带来不必要的测量偏差和噪声。中科院武汉物数所和巴黎天文台针对原子飞行过程中的轨迹控制技术开展了相关研究。2018年,中科院武汉物数所的姚战伟等人针对斜抛式的冷原子干涉陀螺仪原子运动轨迹校正开展了相关工作,通过监测拉曼谱的频率变化并结合拉姆塞伯德干涉技术,对斜抛的原子团运动轨迹进行了三维重合调教,条纹对比度从4%增大到20%以上[10]。2021年,该小组将相似的修调方法拓展到另一套装置中,拉曼光束平行度优于0.4 μrad,干涉面积增大至1.2 cm2,条纹对比度达到8%[11]。2020年,法国巴黎天文台的Altorio M等人提出了一种调节四脉冲原子干涉仪中分离激光束平行度的精确轨迹准直方法,通过监测四脉冲干涉仪的相移变化,测量并修正了拉曼光束与原子抛射方向的夹角,实现了0.2 μrad的角度和0.2 mm/s的速度控制,最终800 ms干涉时间时的干涉条纹对比度达到10%[12]。
上述方法通过调节原子运动轨迹可有效提升原子干涉条纹对比度,但关于原子初始抛射角度对原子干涉仪性能的影响未进行深入分析。本文首先根据四脉冲干涉测量原理,建立了原子抛射的简化模型,然后理论分析了抛射垂直度对原子数目、拉曼脉冲的跃迁效率和干涉条纹对比度的影响。构建了四脉冲原子干涉仪进行实验验证,证实了原子抛射垂直度是影响四脉冲原子干涉仪性能的重要因素。
1 四脉冲干涉测量原理
四脉冲原子干涉的原理示意图如图1所示。在抛射过程中,原子分别与π/2-π-π-π/2四对拉曼脉冲序列进行作用,四个拉曼脉冲宽度依次是τ、2τ、2τ和τ,拉曼脉冲之间的时间间隔为T/2、T和T/2。当原子垂直抛射时,在上抛过程中,形成由ABCG构成的闭合干涉面积,在下落过程中,则形成由CDEG构成的干涉面积,构成“∞“的蝴蝶形干涉环路。上抛式四脉冲原子干涉环路的敏感轴(y轴)垂直于拉曼光方向(x方向)与原子运动方向(± z方向)构成的平面。当xz平面内的干涉面积发生转动时,四脉冲原子干涉仪可用于测量转动效应。
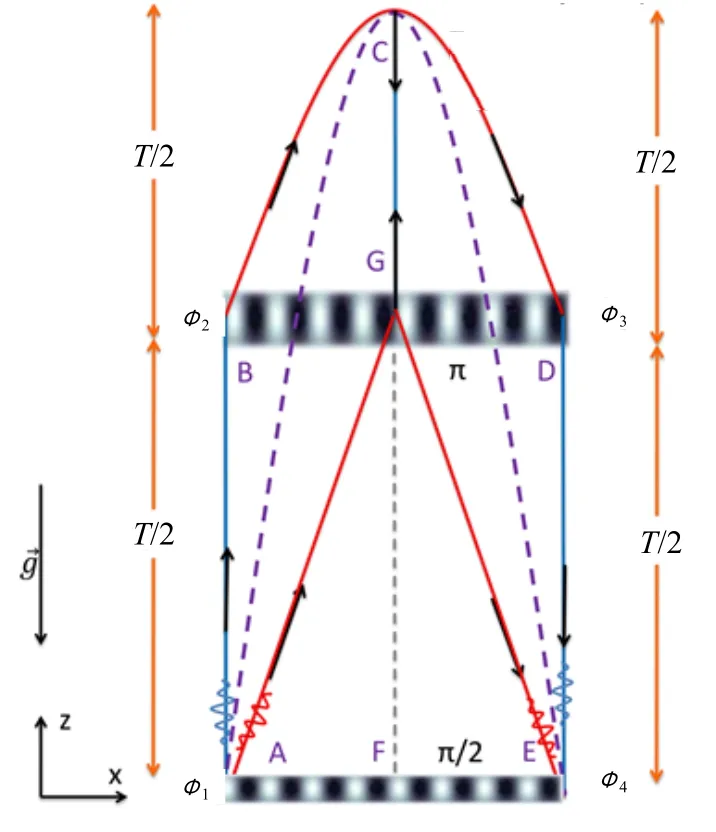
图1 四脉冲原子干涉原理示意图Fig.1 Illustration of a four-pulse atom interferometer
通过在上抛和下落过程中与不同的拉曼脉冲作用,原子会从激光脉冲中获得相应的激光相位(Φi,i=1, 2, 3, 4)。在这一过程中,原子累积的总相移为:

式中,ΔΦ为四脉冲干涉仪的相位,Φi(i=1,2,3,4)为第i个拉曼脉冲的相位,m、A和ħ分别为原子的质量、干涉环路面积和约化普朗克常数,和T分别为拉曼激光的有效波矢、重力加速度、转速和干涉脉冲间隔。等式右侧的两项分别代表拉曼激光和转动引起的干涉相移。可以看到,四脉冲原子干涉仪的相位灵敏度与干涉时间T3密切相关,并且仅敏感转动,对直流加速度不敏感,在转动测量方面具有较大优势。
2 原子抛射垂直度影响分析
2.1 原子抛射垂直度的测量方法
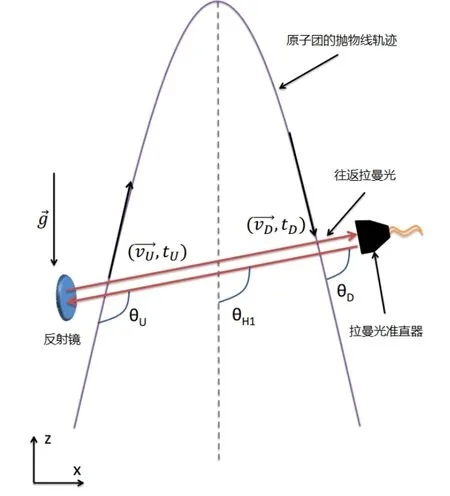
图2 原子抛射垂直度测量原理图Fig.2 Measurement principle of verticality of atom launching.
为了降低原子抛射不垂直度引起的测量偏差,通过测量原子团在上抛和下落过程中与同一拉曼脉冲的拉曼谱,获得相应的多普勒反向共振峰,分别记为和则原子上抛和下落过程中在H1点的多普勒频移分别为:
式(2)中除θU和θD外,其它参数均为已知量和可测量。这样,通过观测和调节θU-θD的差值,最终实现对原子抛射垂直度的优化。
2.2 抛射垂直度对原子数目的影响分析
图3所示为四脉冲原子干涉仪的探测示意图。探测时原子偏离探测光中心的距离可表示为:
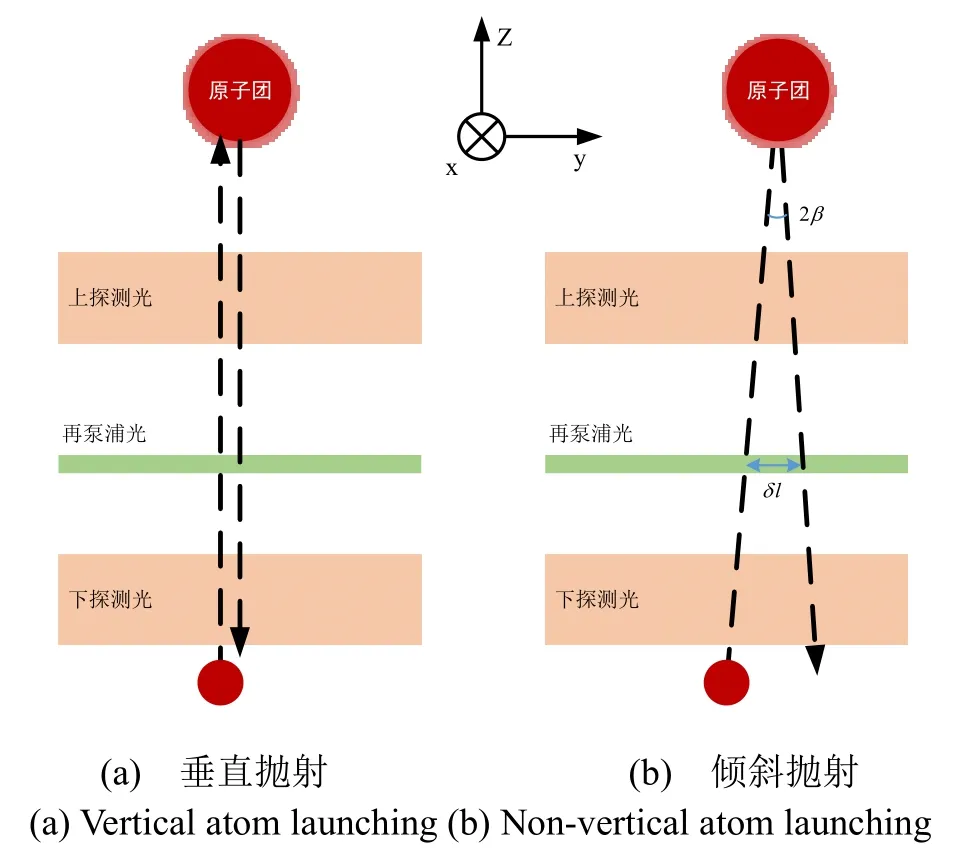
图3 不同抛射角度的原子探测示意图Fig.3 Sketch of the detection scheme with non-vertical atom launching

式(3)中,β为原子团的初始抛射角度沿拉曼光方向偏离重力方向的夹角,v0为原子的初始抛射速度,Tv为原子到达探测光经过的飞行时间。
探测光采用2a×2b=20 mm×5 mm的矩形光斑,其中2a为拉曼光方向,2b为原子运动方向(重力方向)。垂直于2a×2b平面方向的探测光斑尺寸不受限制,可认为该方向的角度偏差对原子数目无影响。
图4模拟了不同抛射不垂直角度时原子偏离探测光中心的距离。原子团的初始尺寸半径 0σ=1.5 mm,考虑到原子团在飞行过程中的扩散(扩散速度则到达探测光时原子团的半径变为这样,探测光的初始尺寸2a=20 mm(图4中的红色点划线)的有效作用范围变窄,仅最中心的10 mm(图4中的蓝色虚线)起作用。
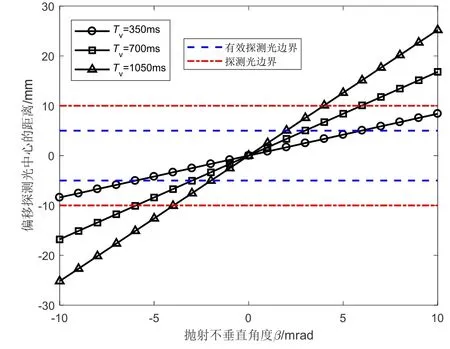
图4 不同抛射不垂直角度引起的探测距离偏移Fig.4 Simulation of offset distances from the probe center versus different non-vertical angles
可以看到,当β较小时,原子偏离探测光中心的距离近似线性变化。当探测时间为350 ms时,允许的最大原子抛射不垂直角度为6 mrad;当探测时间分别增大到700 ms和1050 ms时,对应允许的原子抛射不垂直角度则降低到3 mrad和2 mrad,即更长的干涉时间对原子抛射不垂直角度的要求也更为严格。
图5计算了原子不同抛射不垂直角度时,探测到的归一化原子数目。当原子抛射偏离垂直角度时,探测到的原子数目会逐渐降低。当β= ±3.5 mrad时,探测的原子数目降低至50%;当β= ±9 mrad时,探测到的归一化原子数目降低至1%。当β>±10 mrad时,基本探测不到原子了。
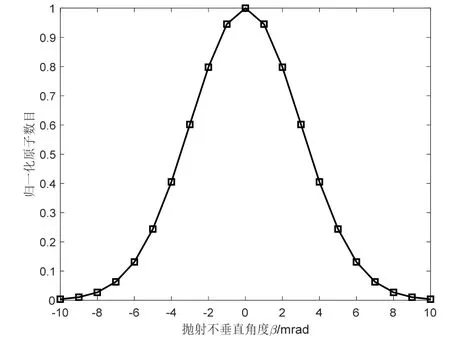
图5 原子抛射不垂直时探测的归一化原子数目Fig.5 Normalized atom number versus non-vertical angles in the Raman beam direction.
2.3 抛射垂直度对拉曼脉冲跃迁效率的影响分析
沿拉曼光的传播方向截面上,当原子处在不同的光强处,其感受到的拉比振荡频率也不同,双光子拉比振荡频率可表示为[13]:

其中Ω0为拉曼光中心的拉比振荡频率,由π脉冲周期τ决定,ω0为拉曼光的束腰半径。当原子抛射在拉曼光的垂直方向上存在角度偏差α时,原子感受到的有效双光子拉比振荡频率变为:

其中δly=v0Tisinα为原子到达第i个拉曼脉冲中心时在探测光方向上的偏移量。
图6模拟了探测光方向存在抛射不垂直角度α时,四个拉曼π脉冲与原子相互作用时跃迁效率的下降。为计算简便,认为四个拉曼π脉冲的最大跃迁效率均为100%。当α= ±5 mrad时,四个拉曼脉冲的跃迁效率分别降至97.2%,96.8%,96%和95.5%,此时四脉冲干涉的理论条纹对比度从100%降至92.8%。当α= ±30 mrad时,四个拉曼π脉冲的跃迁效率分别降至36.2%,31.3%,22.8%和19.2%,此时四脉冲干涉的理论条纹对比度降至3.24%。
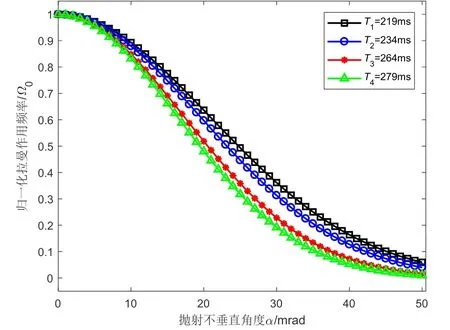
图6 不同原子抛射垂直度时的拉曼脉冲跃迁效率Fig.6 Transition probability of Raman pulses versus different vertical angles in the probe direction
2.4 抛射垂直度对干涉条纹对比度的影响分析
对原子干涉仪而言,一个非常重要的参数就是它的条纹对比度,它表征着总原子数目中参与干涉的比例。由公式σΦ=2σP/C可知,条纹对比度σP越大,则原子干涉仪的相位灵敏度σΦ则越高。理想情况下,条纹对比度可达到1,然而实际上,由于原子团存在一定的速度分布,并且拉曼光强为高斯分布,导致原子团中的原子与拉曼光作用时,感受到的拉比频率不一致,从而降低拉曼作用时原子能态的转移效率,最终引起条纹对比度的下降。
下面理论计算四脉冲原子干涉仪的条纹对比度,以及与每个拉曼脉冲跃迁效率的关系,四脉冲原子干涉仪中拉曼光与原子作用的示意图如图7所示。

图7 四脉冲原子干涉仪的条纹对比度计算示意图Fig.7 Schematic diagram of contrast calculation in a four-pulse atom interferometer
令ri和ti分别为第i个拉曼脉冲对原子的反射系数和透射系数。当原子被拉曼光反射或透射时,满足其中ΦRi和ΦTi分别为原子和拉曼光反射和透射时获得的激光相位。为计算简便,假设干涉之前的原子均处于铷87原子的基态|F=1,mF= 0>上。则原子经过干涉时间2T后,在四脉冲干涉仪的输出端,原子位于激发态|F=2,mF= 0>的跃迁几率复振幅可表示为:

其中,r1和t1为第一个拉曼脉冲(第一个π/2脉冲)的透射和反射系数,r2和r3分别为第二个和第三个拉曼脉冲的反射系数,r4和t4为第四个拉曼脉冲(第二个π/2脉冲)的透射和反射系数。则探测原子处于激发态|F=2,mF= 0>的跃迁几率可写为:
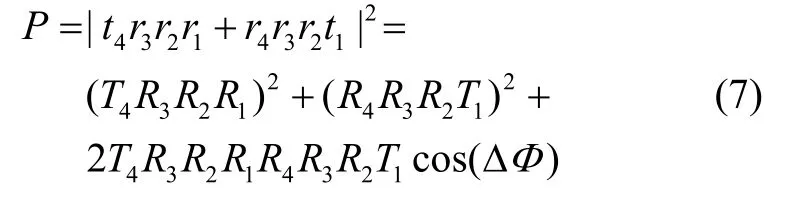
式中,ΦΔ 为四脉冲干涉相位,里面包含了转动引起的相移以及和拉曼激光相互作用传递的相位。
这样,四脉冲原子干涉仪的条纹对比度可表示为

考虑到2T=60 ms的干涉时间内原子与拉曼脉冲的跃迁效率变化不大,因此为计算简便,这里假定。图8仿真了不同拉曼π脉冲跃迁效率时四脉冲干涉条纹对比度的变化情况,作为对照,同时给出了三脉冲的干涉条纹对比度变化。可以看到,随着拉曼π脉冲跃迁效率的提升,原子干涉条纹对比度会随之升高。当拉曼π脉冲的跃迁效率达到理想值1时,干涉条纹对比度达到100%。和三脉冲干涉仪相比,由于原子多了一个拉曼π脉冲作用,因此对拉曼π脉冲的跃迁效率变化更加敏感。
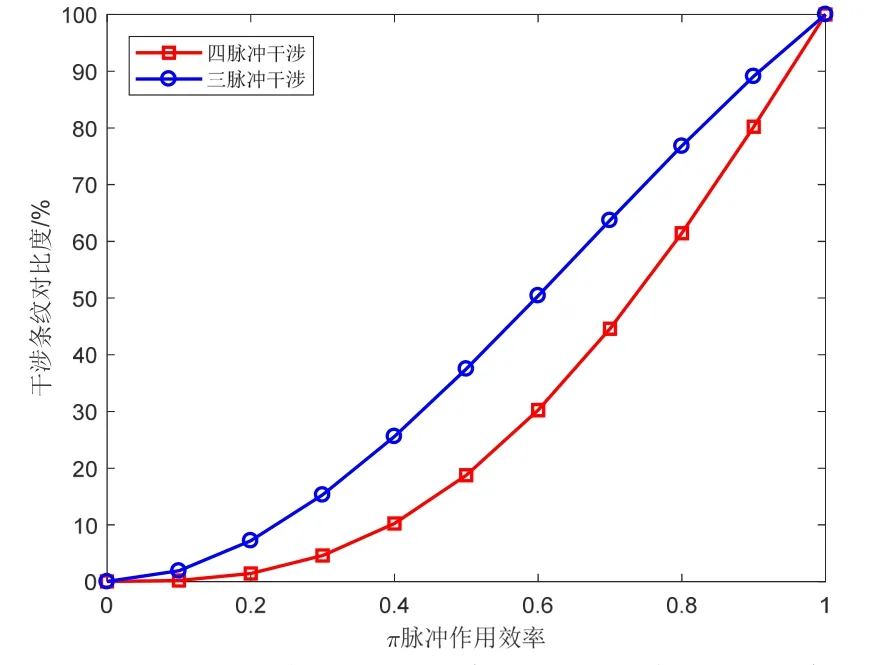
图8 不同拉曼脉冲跃迁效率时的干涉条纹对比度Fig.8 Simulation of fringe contrast vs different transfer efficiency of π Raman pulses.
3 实验验证与分析
实验装置采用二维磁光阱和三维磁光阱的组合产生所需的冷铷原子团,如图9所示。整个实验装置放置在被动隔振平台上(MinusK 500BM-1),以降低地面振动噪声对干涉测量的影响。此外,在实验装置顶部安装了一个双轴倾斜计(Vigor SST460),用于测量和修调原子的抛射垂直度。
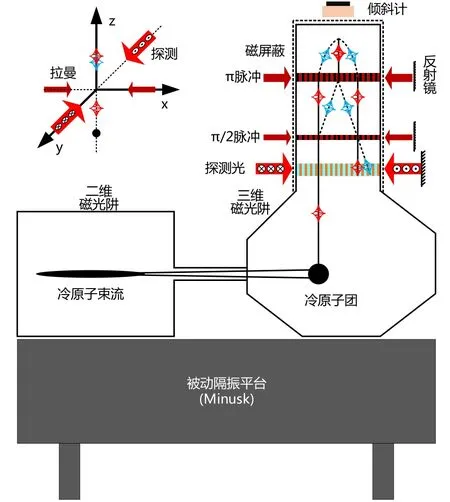
图9 四脉冲干涉转动测量的实验装置示意图Fig.9 (not to scale) Schematic diagram of the experimental setup for a four-pulse interferometer.
二维磁光阱产生连续输出的冷原子束流,在水平推送光的作用下,装载到三维磁光阱中。通过控制三维磁光阱的激光频率、偏振、功率以及磁场,可将冷原子束流再次俘获、冷却,并形成冷原子团,作为后续干涉测量的敏感介质。通过操控三维磁光阱中冷却光的频率,可以使冷原子团沿重力方向垂直上抛,抛射速度与冷却光的频差密切相关。单个测量周期为1.26 s,原子装载时间为200 ms。单束二维冷却光和三维冷却光的功率分别为50 mW和15 mW,经过冷却后俘获的原子数目~2×108。经过3 ms的偏振梯度冷却,利用TOF法和拉曼谱测试,原子温度为2 μK。
在冷原子团的上抛过程中,通过微波作用,将原子制备到|F=1,mF= 0>的磁不敏感子能级上。然后,在四对π/2-π-π-π/2拉曼脉冲作用下,原子会相干地分成两个路径运动,并形成类似“∞”构型的闭合干涉环路。在外界转动作用下,两团原子之间经历不同的路径后会产生相位差,该相位差与外界转速成正比。最后,利用一对共振的探测光照射原子,可以测量原子在F=1、F=2两个能级上的布局数分布,即干涉条纹,从而解调出所需的转速信息。
拉曼光采用两台外腔半导体激光器进行光锁相环,并采用自制的拉曼光筒和原子进行作用,每束拉曼光功率为300 mW,拉曼π脉冲的振荡周期为12 μs。采用λ/4+0°反射镜的组合对入射的拉曼光进行反射,形成lin⊥lin的拉曼光配置来操控原子。
图10所示为原子在上抛和下落过程中分别与四个拉曼脉冲序列作用时的跃迁效率曲线。可以看到,随着原子飞行时间的增加,原子团扩散导致拉曼脉冲跃迁效率依次下降,分别为31%,26%,25%和23%。按照式(8),四脉冲原子干涉仪的理论对比度为3%。

图10 四个拉曼脉冲的跃迁效率Fig.10 Transition efficiencies of four Raman pulses under different duration time.
通过在被动隔振平台上增减小质量块,同时利用双轴倾斜计来记录实验装置的角度变化,得到了不同抛射角度下的原子数目变化情况。图11给出不同原子抛射垂直角度β时探测到的归一化原子数目。可以看到,该曲线与图5趋势基本相符,均为高斯型分布。当β超过4 mrad时,探测到的归一化原子数目开始偏离理论曲线,初步分析为当调节探测光方向角度时,原子感受到的外界磁场也发生了相应变化,后续考虑采取更好的磁屏蔽措施来抑制该问题。

图11 不同原子抛射角度时探测到的归一化原子数目Fig.11 Atom number versus different non-vertical angles β
经过多轮反复调节和试验,最终原子在拉曼光和探测光方向的抛射不垂直角度分别控制在± 80 μrad和±2.3 mrad以下,此时主要受限于拉曼谱的分辨率。此时,扫描原子在上升和下降过程中经过同一束拉曼光的反向拉曼谱,来验证垂直度的效果,如图12所示。可以看到,无论是两侧的±keff频率,还是中间的同向共振频率f0,第1和第4拉曼脉冲的反向谱线对应的共振频率均重合较好,表明了优化原子抛射垂直度的有效性。
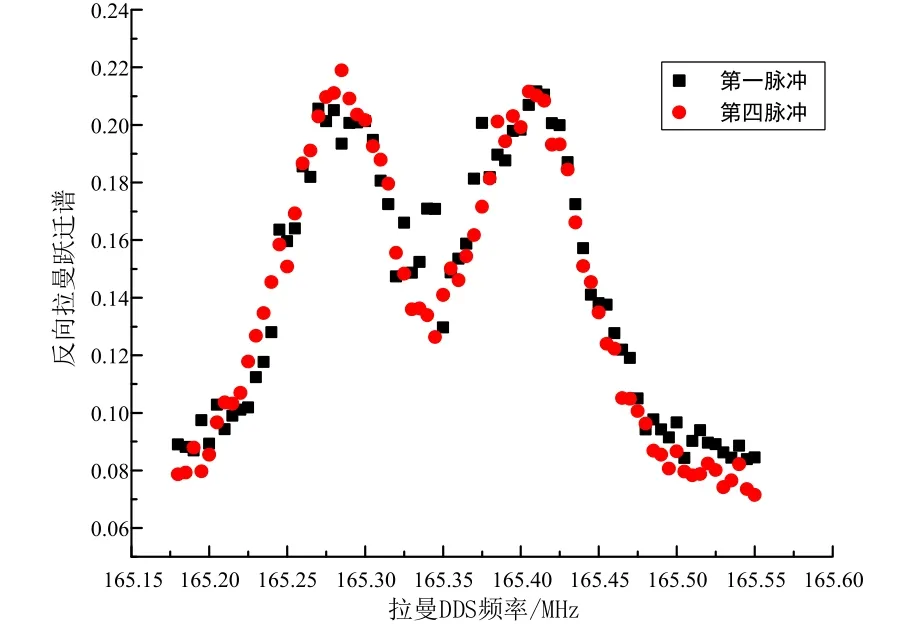
图12 原子在上升和下落过程中经过同一拉曼光束扫描DDS频率得到的反向拉曼谱Fig.12 Counter-propagating Raman spectrum by scanning the frequency of Raman DDS when atoms are launched vertically to go through the same Raman beam.
图13给出了总干涉时间(2T)为60 ms的四脉冲原子干涉条纹,受限于目前较低的拉曼π脉冲跃迁效率,目前干涉条纹的对比度仅为2.82%。后续考虑改进拉曼反射镜提升拉曼光的偏振态,降低波前畸变,降低原子温度等措施来提升拉曼π脉冲的跃迁效率,以改善干涉条纹对比度。
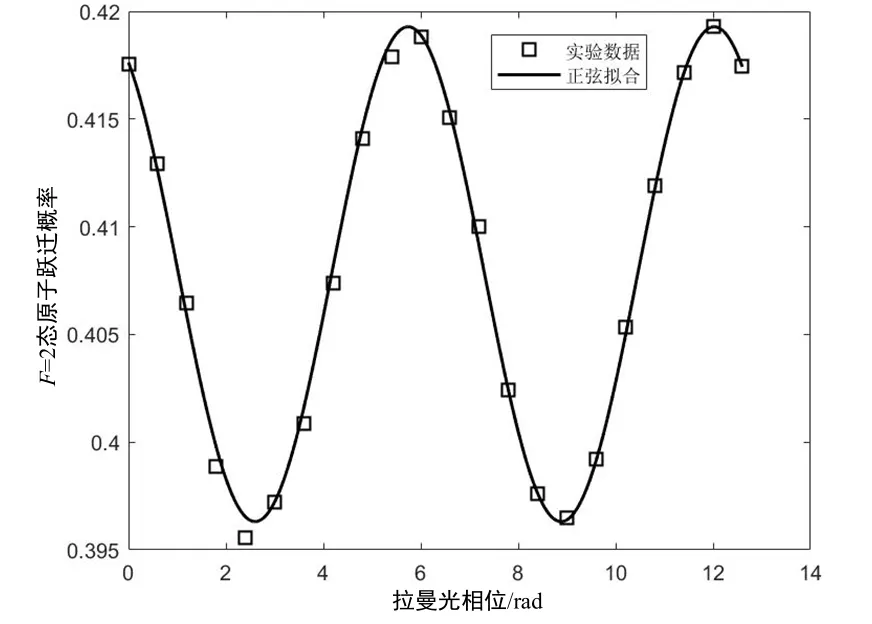
图13 2T = 60 ms的四脉冲原子干涉条纹Fig.13 Fringe pattern of a four-pulse interferometer by scanning the relative phase difference of the last Raman pulse with an interrogation time of 60 ms.
4 结 论
针对四脉冲原子干涉仪中原子抛射垂直度对原子数目、拉曼脉冲跃迁效率和干涉条纹对比度开展了研究。仿真结果表明,当拉曼光方向存在抛射不垂直角度时,会降低探测到的原子数目;当探测光方向存在抛射不垂直角度时,会降低拉曼脉冲的跃迁效率,进而降低干涉条纹对比度。在此基础上,构建了总干涉时间(2T)为60 ms的四脉冲原子干涉仪,干涉条纹对比度达到2.82%,与理论分析相符。理论和实验均证实优化原子抛射垂直度是提升四脉冲原子干涉仪性能的有效技术途径。后续将通过优化拉曼光偏振,改善磁屏蔽,降低原子温度等措施进一步提升四脉冲原子干涉仪性能。
