环形LED 阵列光源显微成像系统设计
2022-01-14马骁颜晓萌
马骁 颜晓萌
(广东交通职业技术学院,广东广州 510650)
1 概述
虽然有许多先进的显微成像设备被发明,例如电子显微镜、原子力显微镜、荧光显微镜等,传统的明场光学显微镜仍旧是生命科学、材料学等领域不可替代的基本工具之一[1-4]。明场光学显微镜由照明光源、成像透镜组,以及载物台等部分组成。其中照明一般采用柯勒照明方式[1-4],照明光由卤素灯这类热光光源加热灯丝产生。热光光源虽然具有发光光谱宽、照明亮度高等优势,但也存在光能转化效率低,使用寿命短,需要散热等缺点。而且,热光光源灯丝要保证照明亮度,通常制成特定的弯曲形状增大发光面积,只有使用复杂的光路,才能实现均匀的照明。相比之下,发光二极管(LED,Light emitting diode,LED)具有更高的发光效率,单色性好等优点,而且LED 本身具有聚光镜结构,LED 芯片发出光线经过聚光镜,可形成发散角较小的光束,当与样品距离远大于样品的尺寸时,照射在样品上的光束可近似看作平行光,无需复杂的光路,也可以提供均匀且高亮的样品照明,因此,LED 正逐渐取代传统照明光源,在显微成像领域发挥着越来越重要的作用[5-9]。此外,单颗LED 体积较小,便于各种形式排布,实现各种入射角的调制照明,这是其他光源难以做到的。
本文根据显微镜成像系统特点,结合环形LED 阵列光源,给出了一套显微成像系统设计思路,并列举出了该装置的使用实例,例如、差分相位显微成像[10,11]、暗场成像[12]。
2 显微成像系统设计
由于环形LED 阵列光源显微成像系统,可以实现光场显微成像、差分相位显微成像、暗场显微成像,需要对样品进行轴向扫描拍摄。下面给出了一种实现轴向扫描自动化拍摄的显微成像系统设计方案,该系统将包括硬件设计和软件设计两部分。在软件的编程控制下,实现自动化的显微成像拍摄。
2.1 硬件设计
在显微成像系统中环形LED 阵列光源被放置在样品正下方,其所在平面垂直于光轴,光轴穿过环形LED 阵列光源中心,LED指向决定照明数值孔径,要求与当前显微物镜数值孔径一致,与不同数值孔径的物镜匹配可采用多种环LED 阵列光源,根据需要控制其点亮环与所使用的物镜照明数值孔径匹配。成像系统中,所使用的无限远显微系统由物镜和管镜构成,通过物镜的光线在物镜后不直接成像,而是形成平行光束,进入管镜,在管镜一倍焦距附成像,成像探测器感光面与管镜后焦面重合。
为了便于自动对焦、寻找感兴趣区域,以及轴向扫描完成三维测量,机械样品位移台由一个长程二维水平X-Y 位移装置和一个长程高精度Z 轴向位移台组成,样品托架被固定在位移台顶端,位于环形LED 阵列光源正上方。二维水平X-Y 位移装置的作用是在水平方向大范围调整样品位置,便于寻找感兴趣区域,而Z 轴向位移台带动样品托架,实现高精度光轴z 方向调节,实现自动对焦并获取样品不同层的显微图像。样品托架用于固定待测样品。
2.2 软件设计
软件部分由拍摄准备程序段和拍摄程序段两部分构成。准备程序包括光源初始化程序、位移台初始化程序和相机初始化程序,在选择成像模式时自动开启。图2 是拍摄程序设计流程图。
初始化程序段是为了计算机与检测硬件间的通信状态,一般相机初始化程序较复杂,因此一般先从检测相机的初始化,调试顺利执行后,再进行其他初始化操作。
3 环形LED 阵列光源显微成像实验
采用上述设计方案可以实现多种成像模式,且可以应用不用倍数物镜,这里分别采用100 倍物镜和20 倍物镜分别进行实验,验证设计方案的可行性。
3.1 差分相衬显微成像
实验中采用的环形LED 阵列光源如图3 所示。
该光源由60 颗参数完全相同的LED 灯珠等间隔排列在环形内面,外径176 mm,内径140 mm,整体厚度15 mm,发光功率24 W,外壳采用铝合金材质,便于散热。光源发光中心波长520 nm,带宽10 nm,该光源被放在下样品正下方,光源面与样品平面平行,光轴经过光源中心,入射角为~64°,计算得到照明数值孔径NA=0.9。刚好与尼康100 倍(平场消色差物镜,NA=1.25)显微物镜数值孔径匹配。
无限远显微成像光学系统使用一台标准透射式的明场显微镜(Nikon 80-i)机架来搭建。使用高速灰度CMOS 相机(Andor,Zyla 4.2P)对样品进行拍摄。
机械样品位移台中样品托架采用悬臂式结构如图2 所示,样品被固定在一端,为保证水平需要在另一端调整配重,保证z轴位移台受力平衡。样品托架选择重量轻、机械强度高的钛合金作为制作材料。高精度z 轴向位移台使用纳米级z 轴位移台(PIHeraPiezo Linear Stage,P-621.1CD),闭环总调节范围100 μm,精度0.4 nm。样品为未染色的硅藻固定装片。
设置拍摄位置,照明模式按照上半环LED 灯点亮,拍摄得到图像I1 如图4(a)所示,上半环LED 灯熄灭,下半环LED 灯点亮,拍摄图像得到图像I2如图4(b)所示,根据公式差分相衬显微图像Id=(I1-I2)/(I1+I2),计算出差分相衬显微图像如图4(c)所示,可以看到经过计算后的图像中硅藻结构更加清晰了。
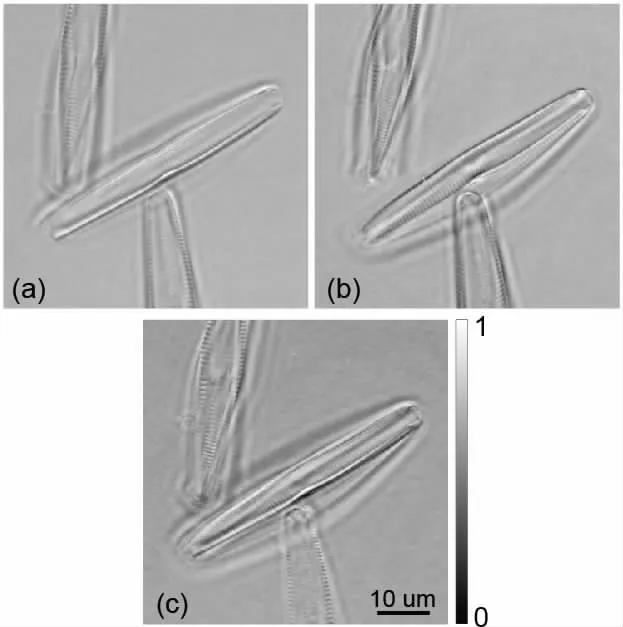
图4 光场显微成像图像

图5 草履虫暗场显微图像
3.2 暗场显微成像
实验中采用的环形LED 阵列光源、无限远显微成像光学系统、机械样品位移台与3.1 节差分相衬显微成像实验中完全相同,为实现暗场成像,采用20 倍尼康物镜(平场消色差物镜,NA=0.4)。设置拍摄位置,照明开启全部LED 灯进行拍摄,样品为未染色的草履虫固定装片。
4 结论
本文简要介绍了一种基于环形LED 阵列光源搭建的显微成像系统,并根据设计方案搭建了实验成像系统,拍摄了两种模式的成像结果,验证了设计方案的可行性。
