基于储水舱式的电磁驱动仿生机器鱼上浮下潜的研究
2022-01-14朱红秀宋高明买浩楠薛逸飞田文健
朱红秀 宋高明 买浩楠 薛逸飞 田文健
(中国矿业大学(北京)机电与信息工程学院,北京 100083)
1 概述
对于仿生机器鱼来说,拥有较好的巡游能力和机动能力,是人类研究的关键。不仅要能进行直线的自由游动[1],而且在转弯、浮潜、倒退等动作上也应自如游动,达到三维空间的游动要求。
本文基于电磁驱动机器鱼[2],采用储水仓法完成机器鱼的浮潜运动。在浮力不变的情况下,通过储水仓的进水和出水改变机器鱼的重力,使机器鱼在水域较窄的环境下上浮与下潜。
2 电磁驱动机器鱼的总体设计
2.1 电磁驱动机器鱼结构组成
机器鱼由头部、中部和尾部电磁驱动器组成。鱼体头部固定铅丝实现机器鱼的配重,防止机器鱼发生纵倾、偏转。头部和中部组成空腔,空腔内放置控制系统硬件,如图1。
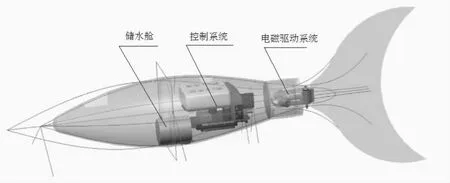
图1 机器鱼结构组成示意图
2.2 储水仓的设计和安装
本文设计了一种可换气圆柱状储水仓,如图2 为储水仓设计图,在密封圆柱状水仓的基础上进行改进,通过上方开口与机器鱼腔体内部空气连通,实现气体的交换,从而降低空气压缩比。

图2 储水仓设计图
2.3 电磁驱动机器鱼体积与配重
在Creo 中测量得机器鱼外部总体积约为2480cm3。称重得到各组成部件的重量和重心位置,如表1。

表1 机器鱼组成部件的质量和重心位置
以鱼体中心为坐标原点建立坐标轴,鱼头部所占的1/2 长度在x 轴的负半轴,后半段在x 轴的正半轴,建立二维平面坐标系,对加入配重后的机器鱼整体重心位置进行分析。
根据力学知识可得机器鱼的重心位置计算法为:
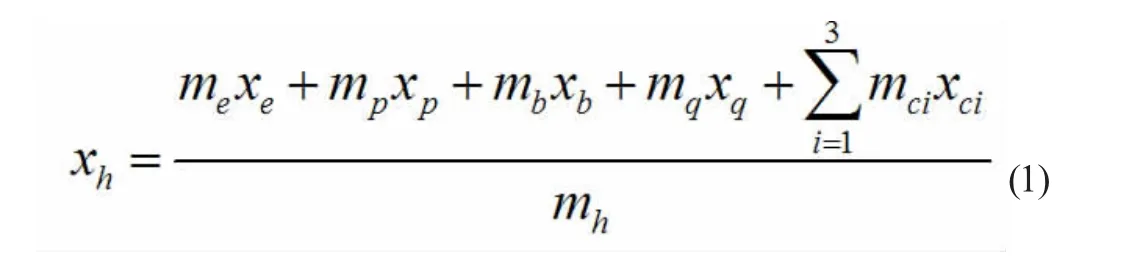

经计算分析得知机器鱼重心得横坐标值约为0,纵坐标为负值,机器鱼总重量与排开水的重量相等,机器鱼可在水中保持平衡。
3 电磁驱动机器鱼上浮下潜的动力学分析
3.1 电磁驱动机器鱼竖直方向受力分析
本节以机器鱼下潜为例,研究在机器鱼由水面初始位置竖直下潜到某一深度的过程中,该过程可分为三个阶段:加速下潜阶段、匀速下潜阶段和减速下潜阶段[5]。
由于在匀速下潜阶段时,机器鱼受到的重力、浮力、流体阻力[4],三力平衡,速度一定,加速度为0,所以本文从匀速阶段开始入手研究。下式为机器鱼下潜过程的合力表达式[8]:

式中:ΣF- 机器鱼在竖直方向受到的合力;
G- 机器鱼储水仓进水后的重力;
Fb- 机器鱼进入水中全排水受到的浮力;
f- 机器鱼在下潜时受到的流体阻力。
3.2 电磁驱动机器鱼下潜运动的仿真数值计算与分析
在研究机器鱼浮潜的过程中,通过ANSYS Fluent 对机器鱼下潜运动进行仿真[6],设定下潜速度求出机器鱼受到的阻力,并在后处理模块获得流体及压力云图。
仿真结果分析:
表2 是得到的机器鱼以不同速度下潜受到的阻力值。
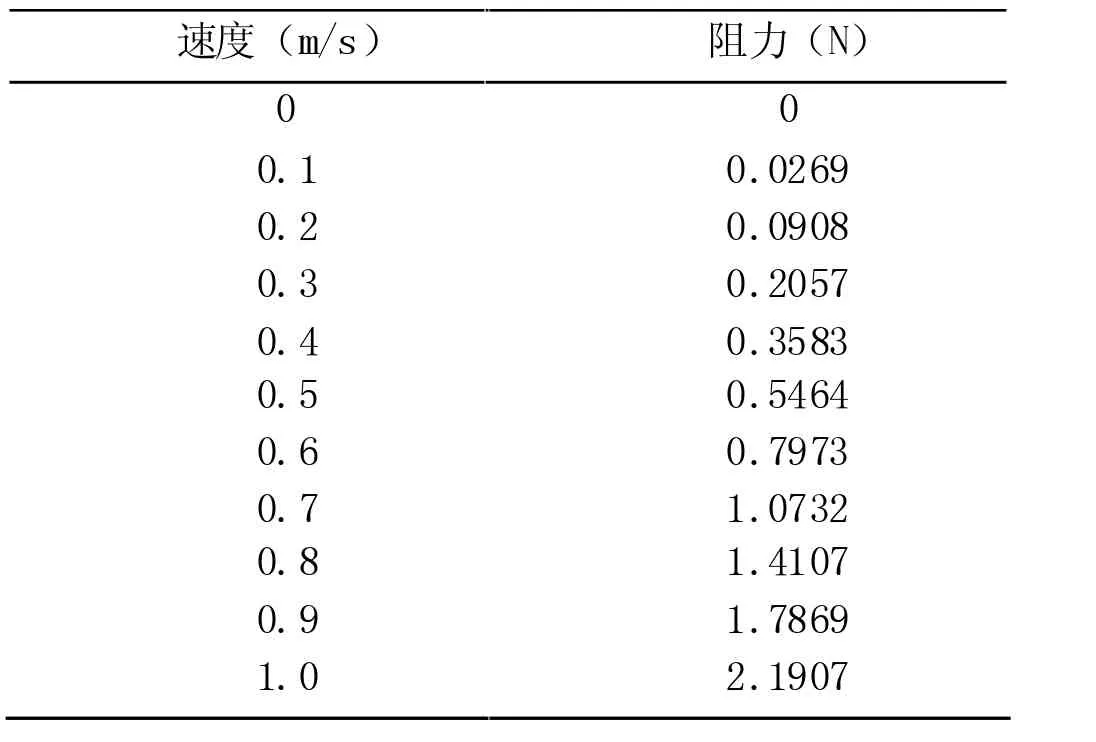
表2 仿真数据结果
使用MATLAB 中的拟合工具,对表中的数据拟合,拟合之后得到曲线方程[7]表示为:机器鱼在下潜过程中,下潜速度越大,受到的阻力也越大。使用后处理模块Result,得到机器鱼匀速下潜过程中鱼体周围流场压力云图3。
由图3 可知,机器鱼下潜时受力较为均衡,鱼体底部受到的压力最大。
4 电磁驱动机器鱼浮潜控制系统的研究
4.1 电磁驱动机器鱼浮潜控制系统的总体设计
浮潜控制系统主要由Arduino uno、L298N、水泵(电机)、储水舱、24V 电池、蓝牙模块组成。
4.2 控制系统硬件功能实现
本节设计了上浮下潜的控制系统。浮潜控制系统工作情况如下:电池通过L298N 模块给水泵供电,L298N 给Arduino 板供电,当蓝牙模块接收到指令,信号传输到Arduino 板,Arduino 开始通过端口将信号传到L298N 模块上,L298N 模块根据收到的信号给水泵(电机)供电,实现正转或反转,并可通过PWM进行调速。
5 电磁驱动机器鱼上浮下潜运动实验
5.1 浮潜控制系统实验
5.1.1 实验目的:检验水泵吸水和排水的稳定性;测试通过PWM对水泵流速进行调节。
5.1.2 实验过程:通过设定脉宽占空比,分别设定水泵抽水流速为2ml/s、4ml/s、8ml/s,在不同时刻记录重量。
图4 为三组实验数据拟合线图。
5.1.3 实验结论:水泵工作稳定。通过设定脉宽占空比调节流速,设定值越大,流速越快。
5.2 机器鱼水中上浮下潜实验
5.2.1 实验目的:通过控制系统,完成机器在水中的下潜运动。
5.2.2 实验过程与数据记录:在Arduino 中传入编译的程序,进行信号调试后,对机器鱼进行整体装配。
通过蓝牙控制机器鱼的下潜运动。图5 为机器鱼在鱼缸中的下潜实验过程,分别为初始状态(a),下潜状态(b)和停止状态(c)。

图5 机器鱼下潜过程图
进行水泵吸水实验,记录机器鱼加速下潜到0.4 米水深所需时间。结果如表3。

表3 吸水量与下潜时间记录值
进行水泵排水实验,记录机器鱼在0.4 米水底上浮到达水面时间。结果如表4。

表4 排水量与上浮时间记录值
5.2.3 实验结论:本节设计的浮潜控制系统可以实现机器鱼的浮潜运动。随储水仓进、排水量的增大,机器鱼浮潜运动时间缩短。
6 结论
本文以实验室的单关节电磁驱动机器鱼作为研究对象,研究电磁驱动机器鱼上浮下潜功能的实现。主要工作如下:(1)提出基于储水仓法的机器鱼上浮下潜的方法。(2)对机器鱼浮潜进行动力学分析与仿真数值计算与分析。(3)设计完成机器鱼浮潜控制系统。(4)进行控制系统调试实验与机器鱼水中下潜实验。
