考虑延时补偿的配电网柔直网侧谐波电流抑制策略
2021-12-15朱海勇吴小丹董云龙吴永华戚宣威
朱海勇,吴小丹,董云龙,吴永华,刘 鹏,裘 鹏,戚宣威
(1.南京南瑞继保电气有限公司,南京 211102;2.国网浙江省电力有限公司电力科学研究院,杭州 310014)
0 引言
基于MMC-MVDC(模块化多电平换流器中压直流)的配电网系统以其灵活可控、不依赖交流电网、可隔离交流故障、易于分布式能源并网等特性,可实现配电网、多元能源及负荷的电能互联,具备能量多向柔性控制、均衡负荷和连续负荷转供,提升供电质量及可靠性的能力[1-4]。
随着MMC-MVDC 的广泛应用,其应用场景也多种多样。非线性负载产生的谐波电流污染是电网主要电能质量问题之一,对电网安全运行产生严重危害并降低电能使用效率。MMC-MVDC本质上是电压源型换流器,其经典的PI(比例-积分)控制器在基于旋转坐标变换的矢量控制方案中可实现直流量的无静差调节,实现有功功率、无功功率、直流电压以及交流电压控制。然而非线性负载产生的谐波电流频率范围较宽,PI 控制器高频增益较低,不能满足控制要求。PR(比例-谐振控制器)在谐振点处有无穷大增益,能无静差地跟踪谐波电流,是谐波治理的良好选择。当前,网侧谐波电流抑制方法主要集中在有源电力滤波器领域,文献[5]提出了一种基于矢量谐振调节器的有源电力滤波器网侧电流检测控制方法,文献[6]提出一种基于基波和谐波电流独立的双闭环控制结构的有源电力滤波器网侧电流检测控制方法。然而,MMC-MVDC 领域关于网侧谐波电流抑制文献较少。文献[7]探讨了直流配电网中直流侧电能质量问题,文献[8]对柔性直流配电网交流侧不对称故障进行研究,文献[9]提出了基于谐振补偿的MMC 网侧低次谐波抑制方法。由于控制链路延时是造成柔性直流系统接入交流电网后引发高频震荡的重要原因[10-13],因此,在考虑延时补偿条件下,研究MMC-MVDC 谐波电流抑制策略具有重要意义和工程应用价值。
本文以MMC-MVDC 为研究对象,以谐波抑制和功率控制为研究目标,分析了基于控制链路延时补偿的PR 控制器的网侧电流闭环谐波抑制的原理。基于MATLAB 分析了功率控制环和谐波抑制环幅频特性,并与传统PR 控制器的谐波抑制稳定性进行对比。最后将该方案应用到三端柔直配电网系统,通过RTDS 仿真试验,验证了所提控制策略的正确性和有效性。
1 MMC-MVDC 系统结构和控制策略
三端柔直配电网系统结构如图1 所示。三端交流系统通过三端背靠背柔直连接,实现交流系统合环。

图1 三端MMC-MVDC 系统结构
以端口1 为例,分析网侧电流闭环控制方法。图2 为柔直系统端口1 接入交流电网的等效电路图。
图2 中usj(j=a,b,c)为交流系统的网侧三相电压,uvj为阀侧三相电压,isj为网侧三相电流,ivj为阀侧三相电流,iLj为网侧非线性负载三相电流,ibpj、ibnj分别为上下桥臂的桥臂电流,udp、udn分别为正负极直流电压,idp、idn分别为正负极直流电流,箭头方向表明各个电流的正方向,L 为桥臂电感。
1.1 柔直系统功率控制系统结构
首先分析柔直系统数学模型。按照图2 所示参考方向,忽略回路电阻,建立柔直与交流系统平衡运行方式下的网侧电压、阀侧电流、阀侧电压表达式,如下所示:
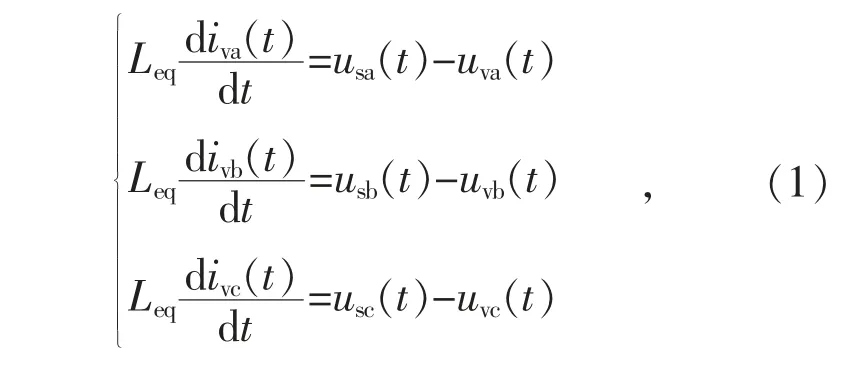
对式(1)进行dq 坐标变换,从而得到dq 坐标系下的电压、电流表达式:

式中:ivd,ivq为阀侧电流的d、q 轴分量;usd,usq为网侧电压的d、q 轴分量;uvd,uvq为阀侧电压的d、q 轴分量;ω 为角频率。
根据公式(2),可以得到MMC 的电流控制框图如图3 所示。
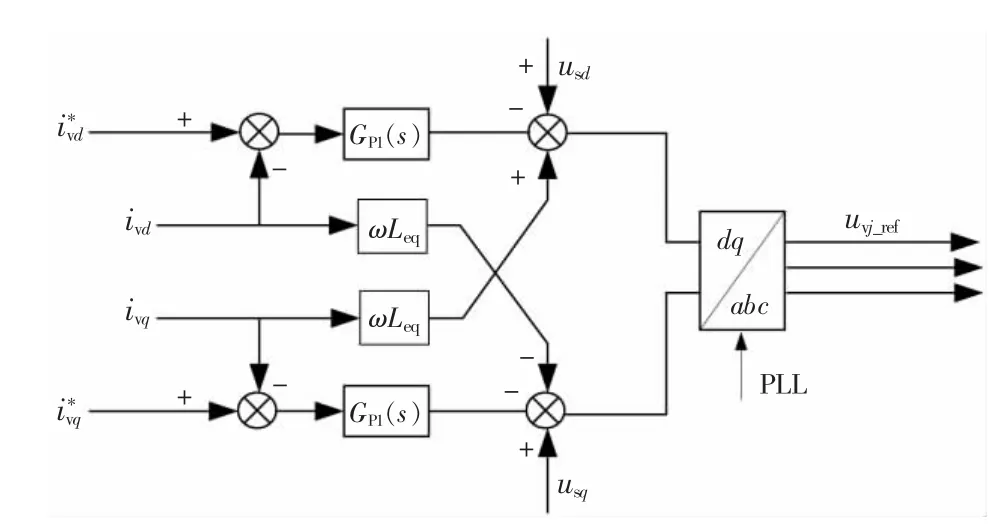
图3 柔直系统电流控制框图
1.2 网侧谐波电流抑制系统结构
图2 中非线性负载将在网侧电流中引入谐波成分,对电能质量产生危害。MMC-MVDC 本质上是电压源型换流器,其经典的PI 控制算法可在dq 坐标系中完成直流侧电压稳定和直流量指令跟随,实现有功功率、无功功率、直流电压以及交流电压控制。然而非线性负载产生的谐波电流频率范围较宽,以5 次、7 次、11 次居多,传统PI 控制器高频增益较低,不能满足控制要求。PR在谐振点处有无穷大增益,能无静差跟踪谐波电流,是谐波治理的良好选择。使用PR 控制器做谐波控制时,在αβ 静止坐标系中,无需锁相环节并且无需对正负序谐波进行分离控制,可由一个谐振控制器同时控制正负序谐波。
由此基于网侧谐波电流检测的闭环PR 控制框图如图4 所示。在柔直系统电流内环叠加谐波抑制环节,以负载谐波电流为指令值,经过PR控制器,对5 次、7 次、11 次谐波无静差跟踪,由阀侧电流ivj补偿谐波电流,最终实现网侧电流的谐波治理。图中,分别为网侧非线性负载电流α,β 轴分量指令值,简称谐波电流α,β 轴分量指令值,ivα,ivβ为阀侧电流的α,β 轴分量,GH(s)为谐波抑制PR 控制器的传递函数。
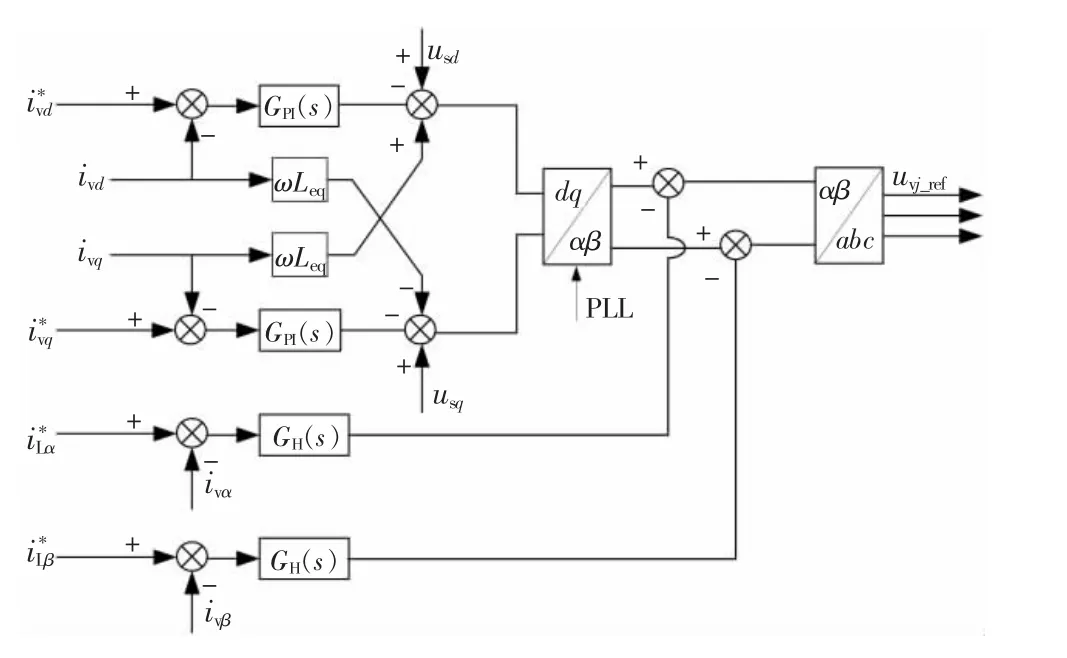
图4 含网侧谐波电流抑制的电流控制框图
将图4 转化成图5 MMC-MVDC 网侧电流闭环控制策略。图中为s 域下谐波电流αβ 坐标系下的指令值,为s 域下阀侧电流dq 坐标系下的指令值,us为s 域下网侧电压,iv_abc为s 域下阀侧abc 三相电流,GPI(s)为柔直系统功率控制环节PI 控制器的传递函数,GMMC(s)为被控对象的传递函数,GH(s)为谐波抑制PR 控制器的传递函数,Gd(s)为控制系统延时传递函数,KPWM为换流器输出增益,本文取KPWM≈1。

图5 MMC-MVDC 网侧电流闭环控制策略
2 电流环控制器设计
2.1 具备延时补偿的PR 控制器原理
MMC-MVDC 的受控对象可视为典型的阻感性负载,其在αβ 静止坐标系下的传递函数可表示为[15]:

式中:Leq和R 分别为MMC-MVDC 连接电抗器的电感和等效电阻[16-17]。
在dq 旋转坐标系中,正序及负序电流控制均可利用PI 控制器实现对电流的无静差控制,PI 控制器由下式给出:

式中:Kp为比例系数,Ki为积分系数。在同步旋转坐标系(dq)和静止坐标系(αβ)中,通过卷积变换可以实现旋转坐标系统下的PI 控制器向静止坐标系统下的PR 控制器的转换:

PR 控制器传递函数GPR(s)为:

式中:Kpr和Kir为PR 控制器的比例系数和谐振系数;ω1为基波角频率。
由于MMC-MVDC 控制链路延时在高频段将给谐波控制带来显著的影响。为了降低系统延时在高频段带来的相位偏移影响,谐波抑制采用带延时补偿的PR 控制器[18],因此式(5)需修改为:

工程应用中,为了获得被控制谐波频率处较大的控制效果,可以将完全谐振控制改为准谐振控制,对于多次谐波抑制,将PR 控制器并联成组[18],得到的谐波抑制控制器传递函数GH(s)为:

式中:KH为n 次谐波PR 控制器的谐振系数;ωn为n 次谐波角频率;ωc为用于设计谐振控制器带宽,一般取0.01ωn;Td为控制链路延时时间。
图5 中的延时传递函数Gd(s),可采用二阶派德等效近似表示为[17]:

式中:Td=1.5T,T 为控制系统采样周期。
2.2 稳定性分析
dq 坐标系中的PI 控制器等效为αβ 坐标系中的PR 控制器后,图5 中坐标变化得到简化,可全部统一至αβ 坐标系中,如图6 所示。图中为s 域下阀侧电流αβ 坐标系下的指令值;iv_αβ为s 域下αβ 坐标系的阀侧电流。
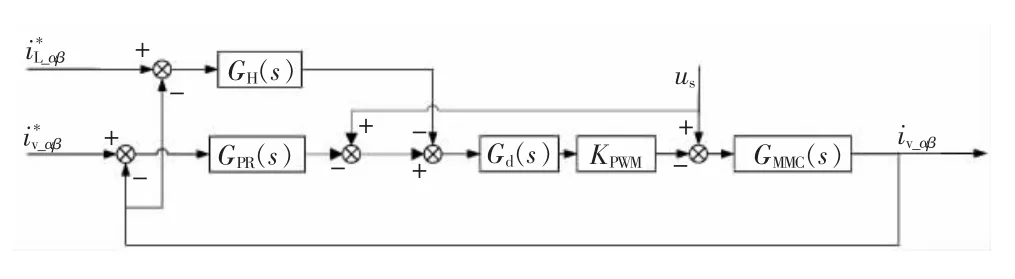
图6 αβ 坐标系中MMC-MVDC 闭环谐振控制策略
根据叠加原理,图6 可分为以有功无功功率电流指令为输入的功率控制环和以负载电流变化为输入的谐波控制环如图7 所示。

图7 简化后的电流闭环谐振控制策略
其中,功率控制环和谐波控制环的开环传递函数分别为GH1(s),GH2(s):
采 用MATLAB 绘 制GH1(s),GH2(s)的 伯 德图。功率控制环开环传递函数GH1(s)的伯德图如图8(a)所示。幅频曲线中,基波频率处的增益很大,有利于减小功率控制稳态误差,在谐波频率处增益很小,对谐波抑制作用十分有限;相频曲线中,相位裕度大于45°,满足稳定性要求。
谐波控制环开环传递函数GH2(s)的伯德图如图8(b)所示。幅频曲线中,基波频率处的增益很小,避免了谐波控制环对基波的影响,在各谐波频率处增益很大,有利于减小谐波控制稳态误差;相频曲线中,相位裕度大于90°,满足稳定性要求[19]。
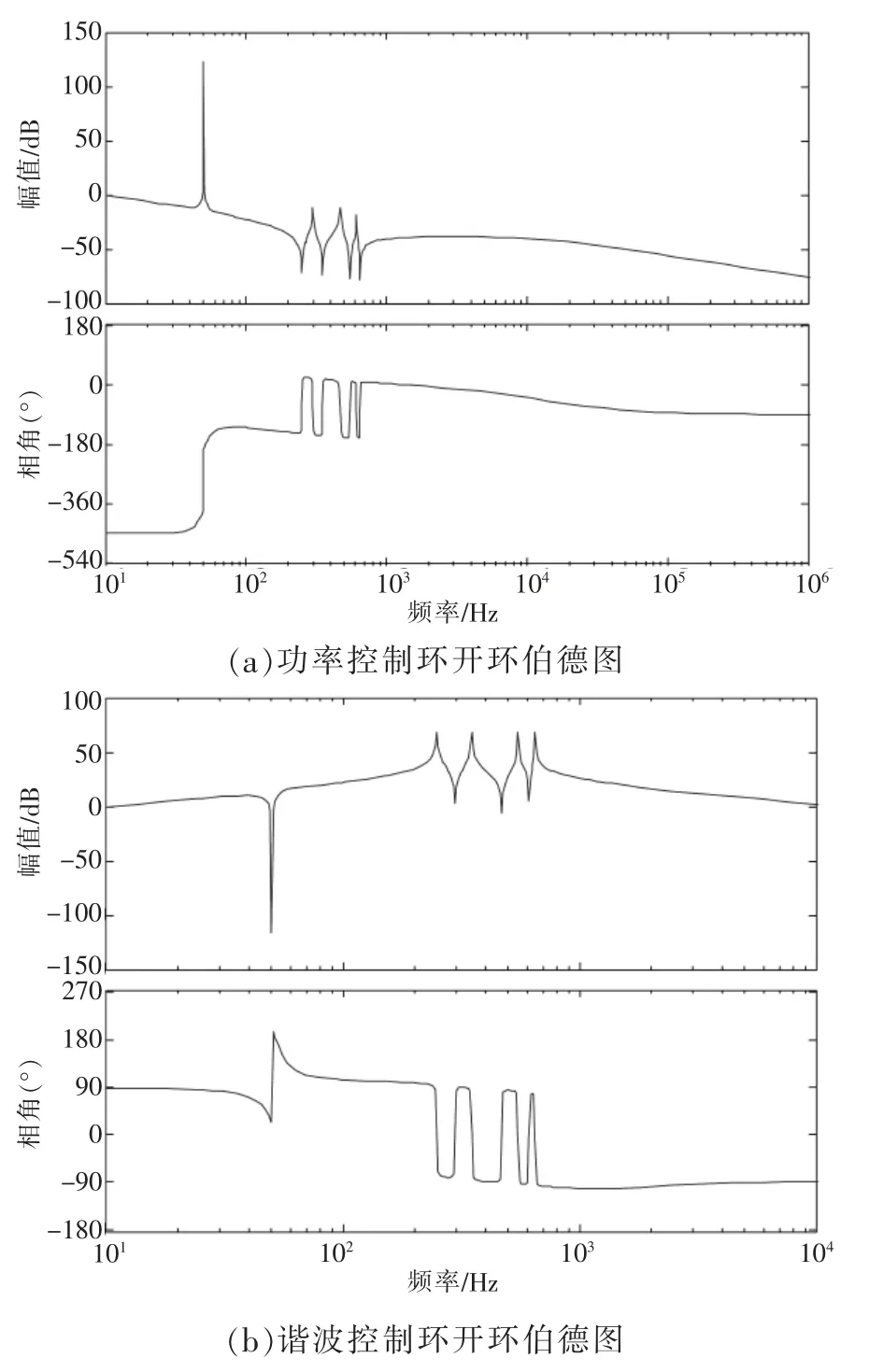
图8 功率控制环和谐波控制环的开环伯德图
2.3 传统PR 控制器的谐波控制环稳定性分析
为了与传统方法进行对比,谐波抑制控制器传递函数GH(s)可采用式(6)传统PR 控制器进行并联成组,得到谐波抑制控制器传递函数Gh(s):

将式(11)代入到式(10)谐波控制环的开环传递函数GH2(s)中,得到基于传统PR 控制器的谐波控制环的开环传递函数Gh2(s),采用MATLAB绘制Gh2(s)的伯德图,如图9 所示。
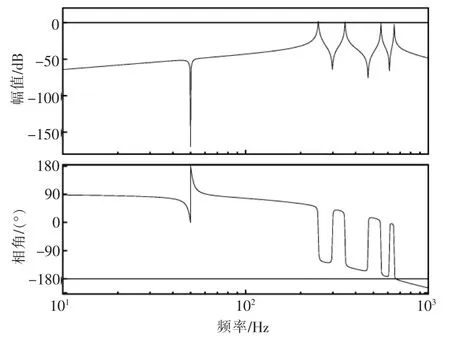
图9 传统PR 控制器的谐波控制环开环伯德图
相频曲线中,由于控制链路延时和被控对象(阻感性负载)自身的相位滞后,增大Kpr,Kir很容易使得相频曲线在高频段最先穿-180°线,使得系统不稳定。而采用控制链路延时补偿的PR 控制器图8 所示,谐波控制环高频段相频曲线依旧满足稳定性要求。
3 试验验证
为了验证所提网侧电流控制方法的正确性,在RTDS 动模实验平台搭建了如图1 所示的三端MMC-MVDC 配电网仿真平台。三端MMC-MVDC配电网RTDS 仿真平台是一种半实物的架构,RTDS 仿真系统通过对模型的运算来实现一次系统的功能,其与工程实际使用的控制保护设备的连接如图10 所示[20-21]。
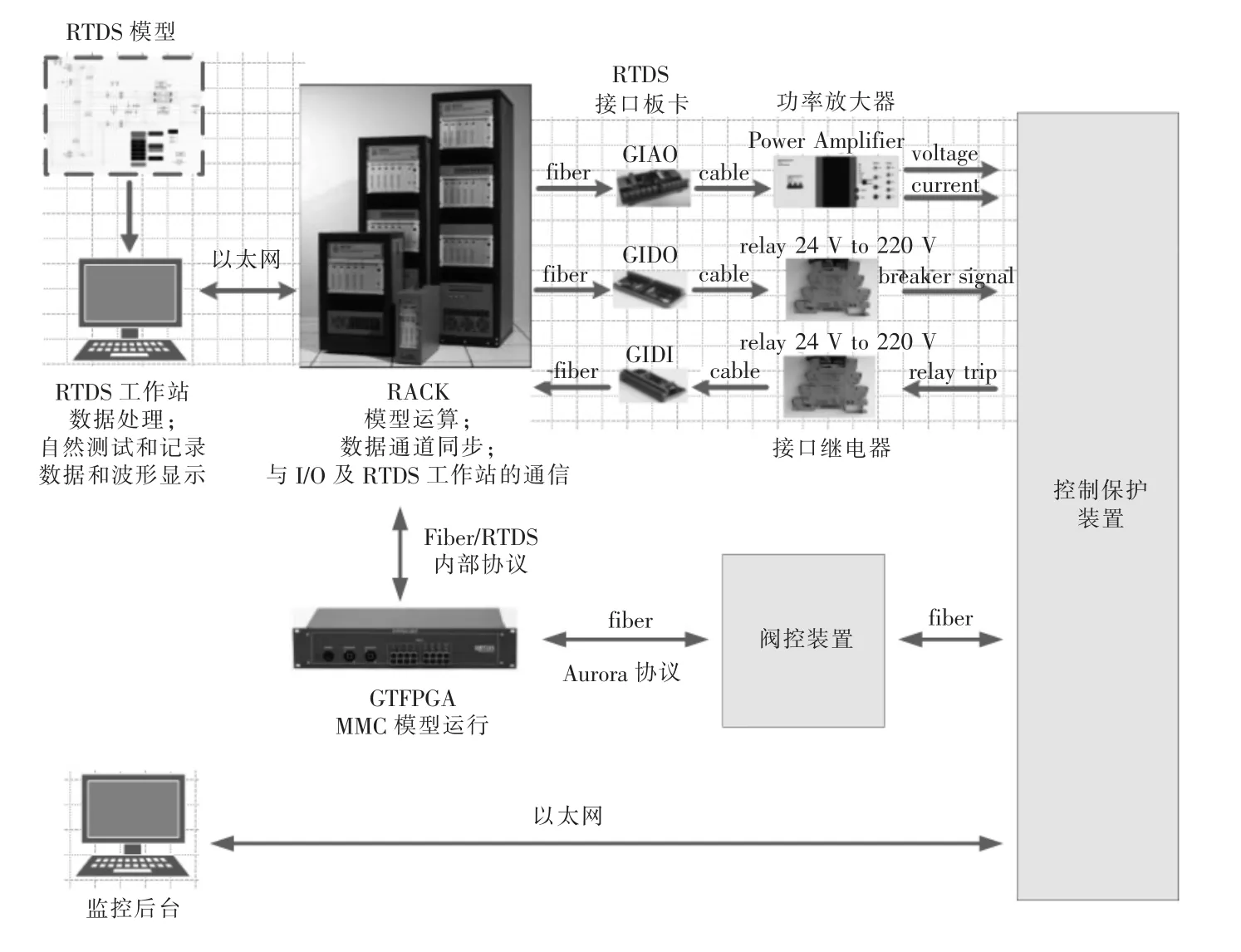
图10 三端MMC-MVDC RTDS 试验平台整体架构
实验使用的三端MMC-MVDC 柔直工程,相关控制参数如表1 所示。
表1 三端MMC-MVDC 试验参数
试验中,在站1 进行网侧电流谐波抑制试验。站1 工作于PQ 控制模式,有功功率指令值为2 MW,无功功率指令值为0 Mvar,非线性负载设置为谐波注入形式,5 次、7 次、11 次谐波电流均为12 A。
MMC-MVDC 运行过程中,有功功率、无功功率控制是基础功能,谐波抑制功能可根据需要投退,本试验验证谐波抑制策略投入后,网侧谐波电流的治理效果。
3.1 单次谐波抑制试验
非线性负载分别注入5 次、7 次、11 次谐波电流,0.04 s 时分别投入5 次、7 次、11 次谐波抑制功能,5 次、7 次、11 次单次谐波抑制结果如图11(a)、(b)、(c)所示,谐波抑制功能投入后,换流器电流ivj补偿谐波电流,ivj中谐波电流明显增加,约一个基波周期内,网侧电流isj中的谐波被有效抑制。

3.2 多次谐波同时抑制试验
非线性负载同时注入5 次、7 次、11 次谐波电流,0.04 s 时同时投入5 次、7 次、11 次谐波抑制功能,5 次、7 次、11 次谐波同时抑制结果如图12(a)所示,谐波抑制功能投入后,换流器补偿电流中谐波电流明显增加,约在一个基波周期内,网侧电流中的谐波被有效抑制。
谐波抑制的数据统计如图12(b)、表2 所示,20 次谐波范围内无其他次谐波放大,5 次、7 次、11 次谐波抑制比均超过83%,THD 下降超过84%。

表2 谐波抑制数据统计
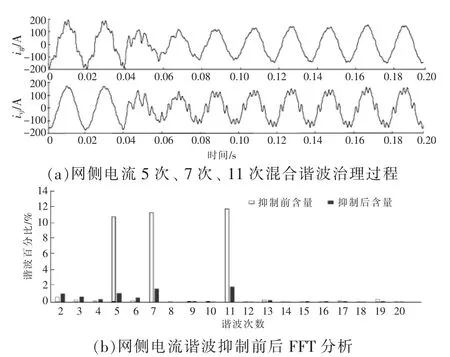
图12 多次谐波电流同时抑制试验
4 结论
为实现配电网柔直功率控制兼谐波抑制功能,满足对非线性负荷应用场景的电能质量治理需求,本文提出了基于谐振控制器的网侧谐波电流抑制策略,并补偿控制链路延时,提升系统在高频段的稳定性。通过MATLAB 分析了功率控制环和谐波抑制环幅频特性,并与传统谐振控制器稳定性对比,验证了本文所提的控制策略的优越性。最后进行RTDS 单次和多次谐波抑制试验,试验结果表明,本文提出的控制策略对5 次、7次、11 次谐波有良好的治理能力。
