基于子空间的Kalman盲自适应Rake接收机
2021-12-08王瑞华
雍 慧,王瑞华
(宁夏回族自治区无线电管理委员会办公室,宁夏 银川 750000)
0 引言
盲多用户检测技术因不再需要采用训练序列,同时能够提高系统的动态跟踪能力,近年来已经成为多用户检测技术的一个研究热点。盲多用户检测的LMS、RLS、Kalman三种盲自适应算法当中,基于Kalman滤波的盲多用户检测算法收敛速度更快、跟踪信道变化的能力更强,在迭代过程中可以获得更低的稳态剩余输出能量,但是算法运算复杂度比较高,对硬件提出更高的要求[1]。因此,为了获得更低的计算复杂度以及更快的收敛速度,受信号子空 间处理的启发,本文将传统的Kalman滤波和子空间方法结合,对Kalman滤波算法进行改进;并将改进的盲自适应算法应用于有效抗多径干扰的Rake接收机,以更好地抑制多径及多址干扰。
1 系统模型
在加性高斯白噪声的信道环境下,有K个用户的同步CDMA系统中,其接收端的基带信号可表示为:

式中,Ak表示第k个用户的信号幅度;{bk(i)∈{-1,+1}}是第k个用户发送的信息序列;Tb是信息符号的间隔;n(t)是具有单位功率谱密度的高斯白噪声;σ是高斯白噪声的均方误差;Sk(t)是第k个用户的归一化特征波形。
设用户1为期望用户,则接收到的信号可表示成:

式中,r=[r(0),r(1),…,r(N-1)]T为接收信号向量;Sk=[Sk(0),Sk(1),…,Sk(N-1)]T为特征波形向量;v=[v(0),v(1),…,v(N-1)]T是噪声向量。式(2)右边的3项依次为期望的用户信号、所有其他干扰用户的信号之和、信道噪声。
2 改进的盲自适应算法及其性能评价
2.1 Kalman盲自适应多用户检测[2]
设用户k为待检测用户,利用线性检测器典范表示2:

式中,向量Wk(n),Sk分别是Ck(n)的自适应部分和非自适应的部分。
对于一个时不变的CDMA系统,构造出多用户检测系统的矢量状态方程以及观测方程:

基于Kalman滤波算法的盲多用户检测描述如下:已知观测方程矩阵dH(n),使用观测的数据对状态矢量Wklopt的各系数在每个n≥1时进行最小均方误差估计。适用于时不变系统的盲自适应多用户检测的Kalman流程如图1所示[3]。

图1 时不变系统的盲自适应多用户检测的Kalman流程
2.2 改进的基于子空间的Kalman盲自适应算法[4]
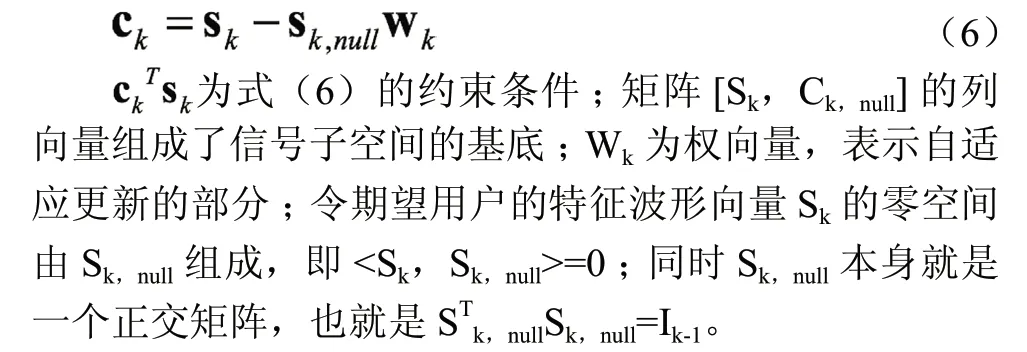
根据CDMA系统接收端信号的数学模型的子空间处理方式,定义盲多用户检测算法的一种新的典范表示:
首先进行信号子空间估计,其次进行和传统Kalman自适应盲多用户检测类似的滤波估计。信号子空间估计:

(3)构造矩阵:假设,Us=[u1u2…uk],令F=[s1u1… uk-1],对矩阵F应用斯密特方法得到和F正交的矩阵Z=[s1z1…zk-1]。
(4)对矩阵Z进行正交化以获得一个正交矩阵,Sk,null=[z1…zk-1],以Sk,null为新观测矩阵,即期望用户波形向量Sk的零空间。
上式中的Sk,null是N×(k-1)维的矢量,这样由公式(6)得到Wk(n)是一个k-1维的矢量。但是基于卡尔曼滤波算法的盲多用户检测器中Sk,null与Wk(n)分别是N×(N-1)维和N-1维矢量。在一般情况下,由于K小于N,因此,用基于子空间的卡尔曼滤波算法进行递推估计Wk(n)时的运算复杂度降低了。基于Kalman滤波算法的盲自适应多用户检测器计算复杂度为O(N2),而基于子空间分解的Kalman的盲多用户检测器计算复杂度为O(NK)。由于多径衰落对信号子空间的影响明显要比对信号本身的影响小,使用信号子空间Us来计算得到的Sk,null,检测器有非常强的抗多径衰落能力。
2.3 改进算法性能评价
基于子空间的Kalman盲多用户检测算法在高斯白噪声信道下的性能通过仿真实验评估:

图2(a) 加性高斯白噪声信道中时间平均信干比比较
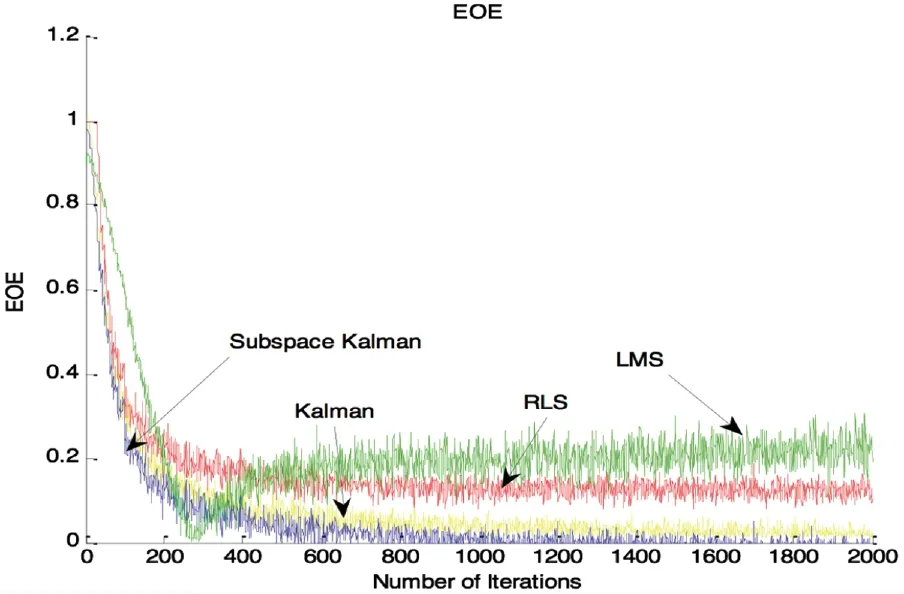
图2(b) 加性高斯白噪声信道中时间平均剩余输出能量比较
由图2可知:基于子空间方法的Kalman滤波盲多用户检测算法在抑制MAI的过程中比起经典Kalman滤波算法、RLS算法以及LMS算法均能够获得较高的信干比,具有最快的收敛速度。改进算法最终收敛于20 dB,算法的剩余输出能量值接近零值,这表明SINR中的MAI已经几乎被完全消除,即对MAI的抑制能力最强。
基于子空间分解卡尔曼滤波的盲多用户检测算法,通过改进的求解方式来提高算法复杂度。表1列出了二种检测器的运行时间,从中可以看出改进算法的运算复杂度比较低。

表1 两种基于Kalman滤波算法的盲多用户检测器运行时间的比较
综上所述:四种盲自适应算法中,基于子空间的Kalman盲多用户检测均具有相对较高的SINR、较好的收敛性、较低的算法复杂度、能更有效的抑制多址干扰。特别的,改进的盲多用户检测还具有很强的抗多径衰落的能力。主要是因为改进算法首先采用子空间分解的方法计算Ck,null,然后用Kalman算法递推估计Wk,opt,而多径衰落对信号子空间的影响要小于对信号本身的影响。所以子空间的Kalman盲多用户检测不仅可以降低算法的复杂度,且具有很强的抗多径衰落的能力。
3 改进的盲自适应算法的应用
子空间的Kalman盲多用户检测不仅能抑制多址干扰,且具有很强的抗多径衰落能力,算法复杂度低,选择基于子空间的Kalman多用户检测算法及最大比率合并方式应用于频率选择性慢衰落信道,构成盲自适应多用户Rake接收机。
盲自适应多用户检测Rake接收机的基本思想是对用户k的各个路径的信号分别盲自适应去相关,然后按照Rake接收机的思想将去相关后的各路径的信号进行合并[5]。

图3 传统接收机和盲自适应多用户检测Rake接收机误码率比较曲线

图4 多址干扰不同时盲自适应多用户检测Rake接收的BER比较
4 结束语
基于子空间的Kalman盲自适应算法相对LMS、RLS、Kalman三种盲自适应算法具有更低的计算复杂度和更快的收敛速度,较好的抗多径干扰效果,即改进的多用户检测算法对多径和多址干扰都有很好的抑制作用。鉴于基于子空间的Kalman多用户检测有以上优良性能,将改进的盲多用户检测算法与基于最大比合并的Rake接收机结合。仿真结果表明,相对于传统的Rake,盲自适应多用户检测rake接收机对干扰具有更好的抑制能力。