直流微电网电压无静差与环流抑制策略研究
2021-11-17侯明宣
侯明宣,李 雪,程 兰,迟 颂
(1.河北工业大学省部共建电工装备可靠性与智能化国家重点实验室,天津 300130;2.河北工业大学河北省电磁场与电器可靠性重点实验室,天津 300130)
1 引言
近几年,新能源发电所占比例与日俱增,而其中分布式发电在新能源发电中有着重要的地位,虽然其规模小,但是所产生的电能可以自产自用,有效地提高了大电网的经济性[1,2]。相比与交流微电网,直流微电网不存在频率的影响,控制方式简单,可靠性更高,因此,直流微电网受到了业界的广泛关注[3]。直流微电网分为孤岛运行和并网运行两种方式,当大电网发生故障时,通过相应的保护动作,使公共耦合点与电网断开,直流微电网转换为独立自治的系统,即为孤岛模式运行,保证了系统的稳定性[4]。
孤立直流微电网中,分布式发电分布广泛,当负荷发生变化时,直流母线电压会产生波动,这非常不利于孤立直流微电网的稳定性[5]。而且存在大量变换器并联的现象,线路阻抗不同,那么并联变换器间会出现环流现象,这些情况严重影响了直流微电网的经济稳定运行[6]。
为了解决直流母线电压波动的问题,W.He, S和M.A[7-8]等人提出适用于BOOST变换器电阻性负荷的非线性干扰的观测器,但非线性干扰观测器参数不易整定。另一方面,为了解决环流问题,Tah A和王勉等人[9-13]提出了新型的下垂控制算法,但下垂控制本身会导致直流母线的下降,而且线路阻抗不同,也会产生环流。
根据以上情况,本文提出一种新型的控制方法,以无源控制为电流内环,电压环为中间环,线路阻抗补偿为最外环。新型三闭环控制方法保证系统既可以快速无静差的跟踪负荷变化,还基本消除了由于线路阻抗而产生的环流。最后,在Matlab/Simulink和RT-LAB实时仿真机中搭建模型,与传统无源控制方法对比,验证了新型方法的可行性。
2 变换器的数学模型与欧拉-拉格朗日模型
直流微电网结构图如图1所示。

图1 直流微电网结构图
本文以上图中升压变换器为例,如图2所示。当开关管导通时,此时电源Vs与电感L构成一个回路,电源Vs给电感L充能,电容C与负荷R构成一个回路,电容C向负荷放电。当开关管关断时,Vs通过电感L和二极管VD向负荷与电容供电。

图2 升压变换器拓扑图
2.1 升压变换器的数学模型
iL和Vc为变换器的电感电流和电容电压,L为电感,C为电容,R为电阻负载,设变换器工作占空比为D,周期为Ts:变换器工作在连续状态,
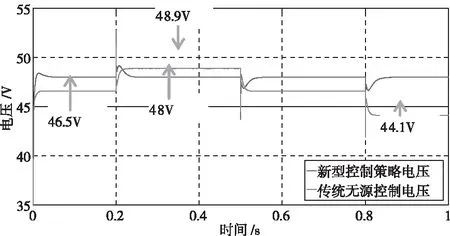
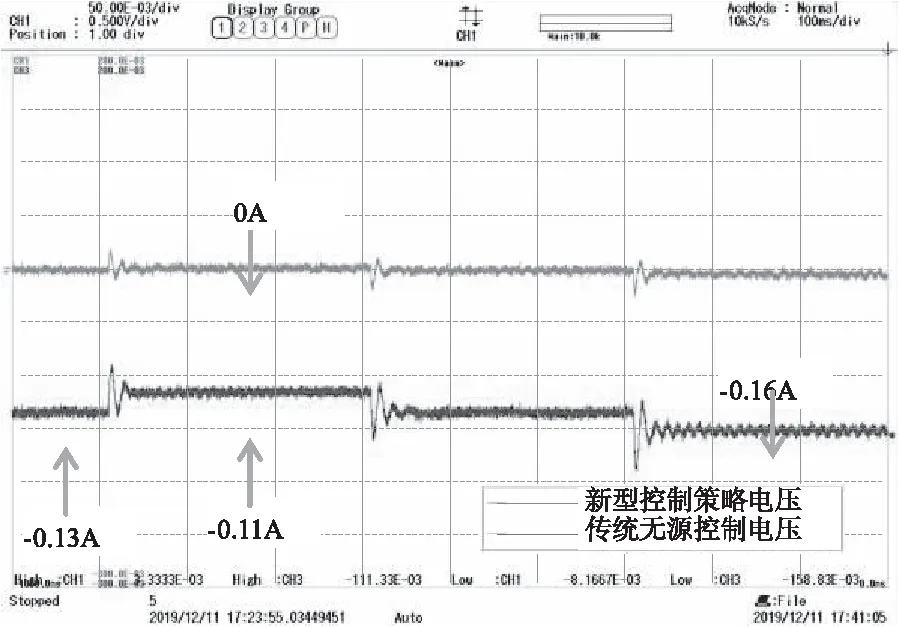
1)0 (1) 2)D·Ts (2) 根据上述两种开关状态,对开关管的导通和关断时间进行加权,可以得出系统的平均状态方程如下: (3) (4) A是正定的对角阵,(1-D)B为反对称矩阵,R具有对称的正定矩阵的特点,所以式(3)有EL模型[14]的特点,BOOST变换器也具有EL属性。 由式(3)得 (5) (6) (7) 由此见得,BOOST变换器是严格无源的。 直流微电网中变换器的并联很常见,而且并联接入直流母线时,由于距离不同,传输过程中复杂等情况等,会导致线路阻抗不一致,而直流母线电压相同,所以会在变换器间产生环流,在传统的控制策略中将线路阻抗忽略,环流的影响也就忽略了。但是环流的存在会严重影响变换器间功率的分配,而且线路阻抗的存在也会导致直流母线电压与变换器输出电压不同,产生电压降落。下面以两个变换器为例,图3为两个变换器并联电路图,图4为两个变换器并联等效电路图。 图3 BOOST变换器并联示意图 图4 BOOST变换器并联等效图 可将图3化简等效为图4。对图4进行分析,VO1、VO2、iO1和iO2分别为变换器1、2的输出电压,输出电流,Vbus为直流母线电压,Rline1和Rline2分别为变换器1、2到直流母线的线路阻抗,R为负荷电阻。可得 (8) 选取相同的变换器1、2,那么,变换器输出电压VO1=VO2,如果线路阻抗不一致,那么iO1不等于iO2,会在两个变换器间会产生环流,假设环流为ih ih=io1-io2 (9) 线路阻抗的存在会产生直流母线电压的降落Δv Δvi=ioiRlineii=1,2 (10) 所以,对于直流微电网中并联变换器的线路阻抗的考虑是必不可少的,这对于变换器的经济性和稳定性有着至关重要的作用。 本文提出了一种新型三闭环控制策略,以无源控制为电流内环,电压环为中间环,线路阻抗补偿为最外环,总体控制框图如图5所示。 图5 新型控制策略控制框图 (11) (12) 鸡皮刺螨感染引起的鹅体表寄生虫病要选择高效驱虫药物进行针对性治疗。本次治疗选择使用伊维菌素,使用剂量为2 mg/kg体重,连续使用5 d。同时,将养殖舍内的垫料全部清理,堆积发酵,杀灭垫料中存在的成虫。选择使用0.005%的溴氰菊酯或精制敌百虫外用药物,配成2%的溶液对养殖舍墙角、缝隙、饮水器、水管等处进行喷洒消毒,一定要喷洒彻底,上述药物交替使用,1周喷洒2次,连续使用2周。通过采用上述综合处理手段处理2周后,该养殖场有75只鹅死亡,剩余患病鹅恢复健康,病情得到切实有效的控制。 (13) 当系统的误差等于0时 (14) 能量函数H(x) (15) 对能量函数H(x)求导 (16) 因为B是反对称矩阵,m=0,R+Rd是正定对角阵,所以n>0。 (17) 式(17)即为无源控制率,将各个矩阵代入上式,得 (18) (19) (20) (21) 若能准确获得电路的数学模型和运行状态的准确信息,上述闭环控制可以使电流快速跟踪负荷的变化并使输出电压精准的控制在期望值,但由于负荷的随机性和波动性,会导致母线电压产生静态误差,且由于存在线路阻抗,并联变换器会出现环流和直流母线电压的降落。 为了解决直流母线的电压值在负荷波动时会产生稳态误差的问题,因为上述闭环选取电感电流为反馈量,而不是选取电容电压为反馈量,而无源电流控制选取电容电压作为反馈量时会导致系统的无源性受到影响,导致系统不稳定。综上所述,提出以电容两端电压作为反馈量,设计电压外环控制器,电容电压为BOOST变换器的输出电压,若不考虑线路阻抗,输出电压为直流母线电压。此控制器采用PI控制。 (22) (23) 在线路阻抗不同的情况下,如果既想抑制环流,而且又不影响直流母线电压的稳定,那么变换器输出电压VOi一定不同,若改变输出电压参考值为 Vrefnew=VOi+EiIOi (24) Vrefnew为新的输出电压参考值,Ei为对应变换器的反馈控制器的系数,iOi为各个变换器输出电流,通过调节Ei的系数,使变换器的反馈系数Ei等于线路阻抗Rlinei,则新的输出电压参考值补偿了线路阻抗的压降,消除了环流的影响。但由于线路阻抗不易测量,且如果用采样电压电流的方法来计算容易产生误差,所以在控制中引入公用的直流母线电压信息Vbus,此时将式(24)变换为 Vrefnew=Vref+VOi-Vbus (25) 本文提出的控制策略采用分散控制的方式,只需要全局通信母线电压即可,不需要时刻通信其它变换器的信息,大大减小了通信压力,且可以适应线路阻抗发生变化时的情况。其次,相比于传统的PI控制,因为内环是无源控制,系统的动态性大大提高。最后,相比于在无源控制基础上在添加非线性观测器,电压外环的PI参数整定更为简单。 为了验证所提出的新型控制策略,在MATALB/SIMULINK中搭建模型。 BOOST变换器参数如表1所示,控制参数选取为,R1d为100Ω,Kp为5,Ki为1000。开始时,带5Ω负荷,0.2s时负荷由5Ω变为5.5Ω,0.5s时变回5Ω,0.8s时,变为4.5Ω,图6为变换器线路阻抗分别为0.2Ω和0.3Ω时传统PBC控制策略和新型控制策略的直流母线图形。图7为两个变换器线路阻抗分别为0.2Ω和0.3Ω时传统PBC控制策略和新型控制策略环流波形图。 表1 BOOST变换器参数值 图6 直流母线电压波形图 图7 环流波形图 由图6中可知,传统的无源控制变换器输出电压的参考值设置为48V,在0-0.2s时,直流母线电压为46.5V,产生了1.5V压降,在0.2s-0.5s负荷为5.5Ω时,直流母线电压升高为48.9V,不能保持在恒定值,在0.8s-1s时,直流母线电压更是降低为44.1V。而新型控制策略由于添加电压闭环和线路阻抗补偿闭环,变换器输出电压的参考值仍设置为48V,直流母线电压始终保持48V不变,保证了系统的稳定性。由图7可知,在0-0.2s时,传统无源控制环流大小为-0.06A,在0.2s-0.5s时,环流大小为-0.55A,在0.8s-1s时,环流增大为-0.86A。而新型控制策略环流为0A,基本消除了环流,且随着负荷的变化,环流基本保持为0A不变。 图8和图9分别为变换器线路阻抗为0.2Ω和0.5Ω时传统PBC控制策略和新型控制策略直流母线电压波形和环流波形。 图8 直流母线电压波形图 图9 环流波形图 若线路阻抗差距进一步增加为0.3Ω,负荷为5Ω时,传统的无源控制直流母线电压为46.2V,压降增大为1.8V,环流进一步增加为-0.13A,而新型控制策略直流母线电压仍然保持在48V不变,环流大小仍为0A左右。 为了进一步验证所提出的策略的有效性,在RT-LAB实时仿真平台搭建所提出的控制策略的仿真模型。RT-LAB有着比数字仿真更接近实际情况的优点,它由上位机和仿真目标机组成,上位机为传统的PC端,仿真目标机为Opal-RT公司生产的OP5600模块,DSP采用TMS320F28035系列控制芯片。 RT-LAB实时仿真输出波形如下,图11和图12分别为两个变换器线路阻抗差距为0.1Ω时的直流母线电压波形图和环流波形图。 图11 直流母线电压波形图 图12 环流波形图 由图11和图12所知,当线路阻抗差距为0.1Ω,负荷为5Ω时,新型控制策略直流母线电压为48V,而传统无源控制策略直流母线电压为46.5V,负荷变化时,新型控制策略直流母线电压基本不变,而传统无源控制直流母线电压不能维持在恒定值,在0.8s-1s时为44.1V。而且新型控制策略环流基本为0,而传统无源控制策略大约有-0.06A的环流。 图13和图14分别为线路阻抗差距0.3Ω时直流母线电压波形图和环流波形图。 图13 直流母线电压波形图 图14 环流波形图 随着线路阻抗差距越来越大,传统无源控制策略的直流母线电压降落进一步增大,当负荷为0.5Ω时,直流母线电压为46.2V,在0.8s-1s时为43.7V。而新型控制策略仍为48V,在负荷波动时,保持不变。而且新型控制策略环流基本为0,而传统无源控制策略大约有-0.1A的环流。与SIMULINK仿真结果基本一致,进一步验证了控制策略的可行性。 本文提出了一种三闭环控制方法,以无源控制为电流内环,电压环为中间环,线路阻抗补偿为最外环,在负荷变化时,该控制方法可以使直流母线电压静差与线路阻抗引起的环流均为0,在Simulink中验证了控制策略的可行性,进一步在更接近实际情况的RT-LAB的半实物仿真平台中进行验证,结果与Simulink基本一致,进一步说明控制策略的有效性。


2.2 升压变换器的欧拉-拉格朗日模型







3 环流的产生



4 新型控制策略

4.1 无源电流控制器的设计













4.2 电压环的设计


4.3 抑制线路阻抗环的设计
5 仿真结果及分析
5.1 SIMULINK建模与分析




5.2 Opal-RT实时仿真



6 结论
