无人帆船最大航速控制的风帆攻角研究
2021-11-15黄朝明刘如磊章志浩林叶锦
黄朝明 刘如磊 章志浩 林叶锦 王 菲
1(大连海事大学轮机工程学院 辽宁 大连 116026) 2(大连海事大学信息科学技术学院 辽宁 大连 116026)
0 引 言
无人帆船是一种以海洋清洁能源(风能)为驱动的多用途新型移动观测平台,可以胜任远海作业,具有实时数据传输功能、低营运成本的优势[1]。无人帆船与传统无人艇的主要区别在于其没有内在动力系统,仅靠风对风帆作用力作为航行的动力。风速和风向的变化,不仅影响帆船的航向,还会影响帆船的航速。在一定风速下,帆船稳定航速会受风向、风帆攻角和帆船航向的共同影响。因此,在时变风况下无人帆船稳定航行中获得最大航速是一项较为复杂的任务。为使无人帆船获得最大航速,目前风帆控制策略的研究主要有最大助推力法[2-4]、相对风向角线性相关法[5]、横倾角—最大航速函数分析法[6]等方法。王倩等[2]基于最大助推力系数下的风帆攻角控制策略建立Fujin帆船运动模型;王国刚[3]和于升杰等[4]基于最大风帆助推力对应的操帆曲线对风帆助航船舶进行研究。Abril等[5]采用操帆经验帆位角近似是相对风向角的一半的规则搭建风帆攻角模糊控制器。Stelzer等[6]研究最大航速与横倾角度对应的函数关系,控制帆船的横倾角来编写风帆攻角控制规则。上述关于无人帆船风帆控制策略的研究仅关注风帆助推力对航速的影响。风帆为帆船提供助推力的同时也会产生侧推力及偏航力矩[7],较大的侧推力和偏航力矩不仅会增大帆船的漂角和舵角,而且使帆船航行阻力增加,进而使帆船航速降低。并且,较大的侧推力还会影响帆船的稳定性,使帆船无法稳定在期望航向,甚至倾覆。
本文综合考虑风帆侧推力和助推力对帆船航速的影响,在静水、理想风况条件下,对无人帆船最大航速的风帆攻角策略进行了研究。
1 研究方案
为了获取目标帆船最大航速下风帆攻角策略,本文采用基于帆船运动模型的变参数(相对风向角、风帆攻角)分析比较法进行研究,技术路线如图1所示。
首先,基于MMG方法搭建帆船运动数学模型,包括裸船受力、船舵受力和风帆受力模型,其中,风帆的助推力和侧推力计算与分析是关键;其次,基于帆船运动数学模型搭建Simulink仿真模型,进行仿真计算,获得变相对风向角工况下帆船航速随攻角变化的规律;最后,综合考虑航速、舵机负荷和转帆电机负荷等因素的影响,分析和归纳无人帆船最大航速控制的风帆攻角策略。
2 帆船运动数学模型
2.1 目标帆船参数与运动坐标系定义
本文以双体帆船为目标船,如图2所示,其主要参数如表1所示。

图2 目标帆船三维模型

表1 目标帆船参数表
为简化分析帆船航速与风帆攻角的关系,在满足要求的前提下,本文仅考虑前进、横移和首摇三个自由度[7]。
定义随船坐标系oxy平面和全局坐标系o0x0y0,船舶前进速度为u,横移速度为v,首摇角速度为r,如图3所示。前进速度与横移速度的合速度为帆船航速Vs,船首方向与帆船航速的夹角β为船舶漂角,船首方向与全局坐标系o0x0的夹角ψ为船舶首向角,船舶舵角为δ,绝对风速为Vt,船舶相对风速为Va,船舶相对风向角为θ。

图3 帆船运动坐标系
2.2 三自由度帆船运动数学模型
基于响应型船舶操纵分离(MMG)方法建立三自由度运动模型[8]:
(1)
式中:m为船舶总重量;Izz为随船坐标系下帆船对z轴的转动惯量;Jzz为随船坐标系下帆船对z轴的附加转动惯量;mX和mY分别为随船坐标系下在前进方向和横移方向上的附加质量;XH、YH、NH为裸船阻力和阻力矩;XR、YR、NR为船舵作用力和力矩;XS、YS、NS为风帆助推力、风帆侧推力和风帆转首力矩。
3 风对风帆作用力计算
3.1 风帆空气动力特性
帆船动力是基于风帆的空气动力特性理论[9],即空气流经翼型弧面时,会产生沿气流方向的阻力和垂直于来流方向的升力,通常采用无量纲升力系数和阻力系数表示,对应关系为:
(2)
式中:ρa为空气密度;SW为风帆的侧向投影面积;FL和FD为风帆升力和阻力;CL和CD为风帆升力系数和阻力系数。
低速空气流体视为不可压缩流体,根据风帆空气动力特性理论,CL和CD仅与风帆攻角α有关,且存在一一对应关系。
采用CFD技术对稳态下的目标风帆空气动力性能进行数值模拟。采用文献[10]计算域和边界条件对风帆进行数值模拟计算风帆升力系数和阻力系数。目标风帆的基本尺寸如下:展弦比为2.70,拱度比为10.5%,风帆弦长为50 cm。假设风帆与水平面垂直,且为刚体翼帆,受到空气动力不发生弹性形变。
攻角变化范围为0°~90°,每隔3°计算一个工况。通过数值模拟计算出风帆升力系数、阻力系数,如图4所示。

图4 风帆作用力系数随攻角变化曲线
3.2 风帆助推力与侧推力计算及分析
对风帆升力和阻力进行合成分解,得到沿帆船首向的助推力和垂直于帆船首向的侧推力,通常采用无量纲助推力系数和侧推力系数表示,对应关系为:
(3)
式中:CX和CY为风帆助推力系数和侧推力系数。
由于目标风帆为对称翼型,因此本文仅研究相对风向角范围为0°~180°,结合式(3)和图4可计算得到不同相对风向角、不同风帆攻角对应的风帆助推力系数和侧推力系数,取5°相对风向角间隔,拟合曲线面如图5所示。
可以看出,不同相对风向角下,风帆助推力系数与侧推力系数随攻角增大而先增大后减小,但驻点和变化速率有差异,对帆船以最大航速航行风帆攻角策略有较大影响。在相对风向角55°时尤为明显,由图5中风帆作用力变化曲面数据可以获得相对风向角55°时风帆助推力系数和风帆侧推力系数随攻角变化曲线如图6所示。

图6 相对风向角55°时,CX和CY随攻角变化曲线
可以看出,风帆助推力系数和侧推力系数攻角在0°~15°范围内同步增长,风帆助推力系数攻角在15°~39°范围内变化不明显,在30°时达到最大值,在此攻角范围内的风帆侧推力系数增长速率较大。
根据图5可得不同相对风向角下所取得的最大风帆助推力系数及对应的侧推力系数,拟合曲线如图7所示。可以看出,当相对风向角小于25°时最大助推力系数趋近或小于零。因此,本文设定目标帆船可航行区的相对风向角为25°~180°。

图7 最大风帆助推力系数与对应侧推力系数关系曲线
4 风帆攻角策略分析
4.1 帆船运动仿真模型
基于上述帆船运动数学模型和数值模拟结果,结合目标船参数,采用MATLAB/Simulink软件建立目标帆船运动仿真模型,如图8所示。输入为相对风向角、绝对风速和期望航向,输出为帆船处于平衡状态下的帆船航速、风帆作用力、船舶漂角和船舶舵角。系统中其他参数设置如下:真实风速为12 m/s,期望航向为0°,系统稳定后当前航向角与期望航向角之差小于1°视为到达期望航向。本文利用变参数PID自动舵系统使帆船保持到期望航向。

图8 帆船运动仿真模型
为获得综合考虑风帆侧推力和助推力下,不同相对风向角对应的风帆攻角策略,将相对风向角和绝对风速作为系统的输入,经过帆船运动模型计算得到相对风速,通过风帆模型计算风帆合作用力,再输入给帆船运动模型,以系统输出航速作为研究风帆攻角策略依据。
4.2 仿真及结果分析
按所设定的参数进行仿真计算,相对风向角在25°~180°范围内,取5°为相对风向角间隔,风帆攻角在3°~90°范围内,取3°风帆攻角间隔,获得变相对风向角工况下帆船实际航速随攻角的变化曲线簇。根据前面的分析结果,按相对风向角的大小分成55°工况和其他角度工况两部分进行分析。
当相对风向角取55°时,将3°~39°范围内的风帆攻角输入帆船运动模型,计算对应的帆船航速、风帆作用力、舵角和漂角,得出帆船航速和帆船参数随攻角变化曲线如图9和图10所示。

图9 相对风向角55°时,航速随攻角变化曲线

(a) 风帆作用力变化曲线

(b) 漂角、舵角变化曲线图10 相对风向角55°时,帆船参数随攻角变化曲线
由图9可知,在相对风向角为55°时,随着攻角增大,帆船的航速先上升后下降。当攻角从3°上升到15°时,航速从2.61节上升到3.71节,上升速率较快;在攻角为15°和18°时,航速相差不大;攻角从18°上升到33°时,航速变化呈小幅下降趋势。此外,当攻角处于36°~39°范围内,由于风帆侧向力相对助推力较大,即使满舵船首仍无法稳定到期望航向,无有效速度输出,因此舍弃此攻角范围。
由图10可知,在3°~30°攻角范围内,风帆助推力随着攻角增大而增大,从33°攻角开始,助推力随攻角增大而下降。在3°~33°攻角范围内,风帆侧推力随着攻角增大而增大。在3°~15°攻角范围内,风帆助推力和侧推力的增速相差不大,在15°~30°攻角范围内,风帆助推力增速骤降,风帆侧推力仍基本保持原增速上升。超过30°攻角时,风帆助推力开始下降,风帆侧推力增速也开始下降。可见,在3°~33°攻角范围内,漂角随着攻角的增大而增大,舵角(±代表方向)随着攻角的增大而增大。
以航速最大为评价指标,选择15°或者18°攻角。攻角为18°时,舵角为14°,漂角为4°,风帆助推力为78 N,风帆侧推力为82 N;攻角为15°时,舵角为11°,漂角为3°,风帆助推力为77 N,风帆侧推力为69 N。综合考虑应用中舵机和转帆电机的负荷因素,选择最佳攻角为15°。
将其他相对风向角分为25°~50°、60°~70°、75°~90°、95°~115°、120°~125°、130°~145°、150°~165°和170°~180°八组,按照相对风向角55°的分析方法,研究在不同相对风向角下,帆船航速随攻角的变化,仿真计算结果如图11所示,未输出值为无效速度值。

(a) 相对风向角25°~50°航速变化曲线

(b) 相对风向角60°~70°航速变化曲线

(c) 相对风向角75°~90°航速变化曲线

(d) 相对风向角95°~115°航速变化曲线

(e) 相对风向角120°~125°航速变化曲线
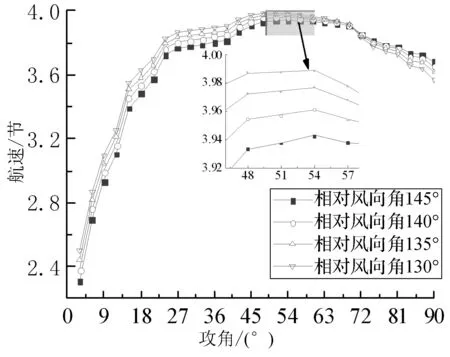
(f) 相对风向角130°~145°航速变化曲线

(g) 相对风向角150°~165°航速变化曲线

(h) 相对风向角170°~180°航速变化曲线图11 不同相对风向角下,航速随攻角的变化曲线
可以看出,不同相对风向角下,有效攻角范围不同。相对风向角在25°~105°范围内,在大攻角时,实际航向无法稳定到期望航向,相对风向角在25°时,风帆最大助推力对应攻角,帆船实际航向无法稳定到期望航向。相对风向角在175°~180°范围内,由于风帆助推力相对侧推力较小,在小攻角范围内,帆船实际航向无法稳定到期望航向。综上,在可航行区相对风向角25°~180°范围内,帆船最大航速下风帆攻角策略如表2所示,在相邻组别采用插值拟合。

表2 最大航速下风帆最佳攻角控制表
在可航行区相对风向角25°~180°范围内,不同相对风向角对应的最大航速如图12所示。相对风向角在25°~110°范围内,帆船的最大航速随着相对风向角增大而增大。相对风向角在110°时,航速达到最大(4.02节)。相对风向角在110°~180°范围内,帆船的最大航速随相对风向角增大而降低。

图12 不同相对风向对应最大航速曲线
5 结 语
在无人帆船航行中,针对定航向最大航速航行的研究,本文提出了一种综合考虑风帆助推力和侧推力风帆最佳攻角策略的分析方法,并获得目标帆船的最大航速下风帆攻角策略。本文所做的研究工作及相应结论可为无人帆船智能航行风帆攻角控制器的设计提供理论参考。结合目标帆船运动仿真模型,对相同相对风向角下能为目标帆船提供最大航速的风帆攻角进行分析和归纳,得出结论如下:
(1) 相对风向角在0°~80°范围内,在攻角较大时,由于风帆侧推力相对助推力较大,导致帆船实际航向无法稳定到期望航向。
(2) 最大风帆助推力法与最大航速下对应的风帆攻角策略不同,且当相对风向角为25°时,按照最大风帆助推力法风帆攻角策略,帆船无法在期望航向上稳定航行。本文制定了风帆助推力和侧推力共同影响的帆船最大航速控制的风帆攻角策略。
