基于无人机巡检的围护结构顶部位移监测模型新方法
2021-11-09鲁海霞
鲁海霞 张 伟
(1.河南科技职业大学,河南 周口 466000;2.河南科技大学,河南 洛阳 471000)
0 引言
当前我国基础设施建设迅速发展,在发展过程中出现了大量深基坑围护工程,基坑围护涉及岩土、结构等工程,其围护的稳定性与施工安全密切相关,而复杂环境、建筑交错等因素都对基坑围护的强度和变形造成了影响,增加了围护体系的风险[1-2]。为了防止围护变形,对施工过程中的基坑围护进行监测,设定监测预警值,对基坑开挖时周边围护的过大位移进行预警;当位移超过设定值时,及时采取应对措施,保障基坑、地下设施以及周围建筑的安全[3-4]。
现阶段,围护监测模型的相关研究取得了较好发展,文献[5]采用基于双曲函数土体弹簧的围护监测模型,通过原位测试,获得了围护结构土体的非线性弹簧参数,还可以对施工现场的监测数据进行分析,但该模型未采集基坑被动区域的参数,模型监测时所需要的数据量大。文献[6]采用基于数值模拟的围护监测模型,计算基坑围护结构的断面,测量围护结构顶部的坑外位移,并将其与数值模拟结果进行对比,但该模型忽略了基坑安全冗余度对围护体系的影响,模型所需要的数据量也较大。文献[7]采用基于MATLAB的围护监测模型,采用MATLAB中的拟合曲线,分析围护体系的监测数据,结合人工神经网络预报围护情况,但该模型选取的神经网络与拟合曲线的适应度较差,模型更新数据量大。
针对上述问题,该文基于无人机巡检数据,构建了围护结构顶部位移监测模型,利用无人机采集围护结构的航拍数据,并对采集的数据进行处理,得到模拟围护结构顶部真实形态的点云平面,确定围护结构的顶部位移,降低监测对实测数据的需求量。
1 围护结构顶部位移监测模型设计
1.1 基于无人机巡检获取围护结构航拍数据
通过无人机巡检采集围护结构的航拍数据。在每个基坑边布设1~3个观测墩,在观测墩顶部安装整平钢板作为工作基点,该基点也是无人机固定到达的巡检点,选取低速低空飞行方案,根据预计的图形比例尺和地面分辨率确定无人机的飞行高度,在无人机上安装激光扫描仪和照相机,令激光扫描仪的排列阵面为矩形,采用垂直摄影和倾斜摄影2种方式[8]。无人机摄影高度S如公式(1)所示。

式中:E为像素原件尺寸;a为激光扫描仪镜头差距;b为影像地面分辨率[9]。
选择最小步长节点,最小步长L如公式(2)所示。

式中:vi为第i路段的航迹航程;n为围护边的路段总数;I为路段距离的最小值。
将每个路段的方位角偏转视为路径偏转角,计算无人机巡检的最大路径偏转角K,如公式(3)所示。

式中:Pmin为无人机巡检最小转弯半径;O为无人机巡检速度;gmax为最大法向过载。
无人机巡检路径的目标函数如公式(4)所示。

式中:minV为最小目标值;G为惩罚函数;Hj为第j个监测点与相邻布设点之间的距离;m为围护结构布设的监测点数量[10]。
根据无人机和激光扫描仪的技术参数对minV进行约束,并求解minV的最优解。根据最优巡检路径设置无人机巡检时与飞行角度相关的参数,使用无人机巡检航线遍历布设的所有监测点,获得围护结构的航拍数据。至此完成对基于无人机巡检的围护结构航拍数据的获取。
1.2 增强航拍影像中围护结构边缘像素
预处理航拍数据,增强影像中围护结构边缘的像素。在拍摄设备中读取图像,预处理围护结构航拍数据,将图像转化为灰度图像。降噪转换后的灰度图像,并将图像中大噪声点、反射强度与周围点云具有明显差异的孤立点云当作无用点,对其进行手动剔除。过滤反射强度与周围点云相近的噪声点,计算像素点标准偏差Q,如公式(5)所示。

式中:l为像素值的临界系数;xc为第c个像素点的像素值;C为像素点的总数量;为像素样本值的均值[11]。
设定标准偏差的阈值,当像素点Q值大于设定阈值时,将其剔除;当Q值小于阈值时,则对其进行保留。完成点云去噪后,划分围护结构的目标像素点、地面植被的干扰像素点,分类和过滤点云数据,遍历并提取目标像素的边缘。将扫描得到的目标质心作为特征向量,并将包括围护结构的图像加入阵列,计算每幅影像质心的坐标数据。设过滤后的图像为h(x,y);其中,(x,y)为像素位置,d、e分别为x方向、y方向最大坐标和最小坐标的中间值,则质心位置R如公式(6)所示。

式中:P为无人机巡检转弯半径;K为点云图像的特征值。
结合时间参数和质心位置预测下一位置的目标质心,计算每幅红外图像中所有的质心坐标。其中,时间参数为影像中相邻2幅红外图像的间隔,连接时间参数后得到连续轨迹,使围护结构目标轨迹趋向稳定[12]。把图像灰度概率分布作为直方图变换的基础,将灰度概率视为基本算子,像素点变换公式如公式(7)所示。

式中:w为基础算子;f、g均为基础算子的映射集合;Δf、Δg分别为各集合中基础算子的增量值;hf(w)、hg(w)分别为集合f、g中的基础算子灰度值。
通过公式(7)将集合f中的灰度值转换至集合g,使输出像素点灰度值位于[g,Δg]中,并输出直方图。
设灰度直方图为h(x,y),根据直方图的分布积分函数调整映射后的灰度,得到灰度分布函数J如公式(8)所示。

式中:u为像素灰度级的级数;X、Y分别为x方向、y方向的像素点数量;rk为同一灰度级的像素点数量。
以公式(8)为基础,将围护结构图像灰度进行非线性变换,使像素点灰度概率与灰度级相对应,从而增强灰度图像中围护结构的轮廓像素。至此完成增强航拍影像中围护结构边缘像素的任务。
1.3 构建围护结构顶部位移监测模型
沿着边缘轮廓分割每幅图像的围护结构边缘,并对分割数据进行匹配,建立用于围护结构顶部位移监测的模型。连接围护结构边缘轮廓的像素点,把轮廓内的图像像素点划分为多个不同的子集,令子集归属于连续的局部区域内,在连续曲线上取固定距离,计算每段曲线的梯度幅值Z(x,y)和梯度方向U(x,y),如公式(9)所示。

式中:Wx、Wy分别为x方向、y方向的曲线固定距离;β为连续曲线相对x轴的夹角。
把梯度幅值Z(x,y)和梯度方向U(x,y)输入卷积模板,多次迭代更新后,把梯度幅值和方向处于同一位置的像素点作为特征点。为每个特征点选择一个主方向,沿着主方向配准特征像素点,过程中保持特征矢量旋转不变,寻找每个特征点的最佳旋转空间,使特征点投影到另一幅红外图像的特征点。投影空间M如公式(10)所示。

式中:T为协方差矩阵;N为无人机各拍摄角度相同特征点的数量;s1、s2分别为连续曲线特征点处的最大斜率、最小斜率。
将协方差矩阵T作为投影空间中的第一主成分,在M值的范围内改变协方差矩阵的取值,最小化特征点的欧式距离,直至2幅红外图像的围护结构完全配准,过程表达式如公式(11)所示。

式中:minF为最小欧式距离;t(x,y)、z(x,y)分别为目标点集、参考点集的配准坐标;o为不同摄影角度的点云数据关联参数;M'为投影空间中对协方差矩阵的修改增量。
通过公式(11)对多个扫描角度的点云数据进行精细配准,然后将围护结构顶部的边缘轮廓切割成多份,将每个小份拟合成一个平面,栅格化处理围护结构顶部,栅格化处理围护结构顶部位移图像后将其划分至小正方体中,使每个对应的平面分配相等的体积,从而得到三维点云的最佳逼近平面。使用该最佳逼近平面表示围护结构顶部的真实空间,根据小正方体内的像素坐标,结合图形比例尺确定围护结构顶部监测点的三维空间数据。设置围护结构顶部位移的监测周期,记录各监测周期下监测点的位置坐标,得到围护结构顶部的位移量。至此完成对围护结构顶部位移监测模型的构建,完成基于无人机巡检对围护结构顶部位移监测模型进行设计的工作。
2 实证研究
将该设计模型与基于双曲函数土体弹簧的围护监测模型(文献[5])、基于数值模拟的围护监测模型(文献[6])以及基于MATLAB的围护监测模型(文献[7])进行对比实验,比较模型监测顶部位移时需要更新的数据量的大小。
2.1 基坑围护工程概况
选取某基坑工程作为研究对象,该项目位于某市市中心,基坑开挖形式为放坡开挖,整体呈矩形,长度和宽度大约为179 m、96 m,占地面积约为17 184 m²,最大开挖深度为4.1 m,力学性质较差,土质为粉质黏土,深度为5 m~12 m。基坑围护结构采用复合式土钉墙,预埋钢筋的长度为20 cm,钢筋头磨成半球状,钢筋露出地面的长度为20 mm,围护结构冠梁顶的钻孔孔深为90 mm,观测墩尺寸大小为140 mm×140 mm×280 mm。由于地质问题,因此造成围护桩体下部咬合出现偏差,围护结构顶部出现变形,围护结构顶部变形标准为最大位移量小于50 mm。
2.2 建立模型
为了准确分析该工程围护结构的顶部位移,每隔20 m沿直线设置1个监测点,整体监测区域为矩形,在2个长边布置7个监测点,2个短边布置5个监测点,使用直径为10 cm的圆形红色贴纸作为标靶并黏贴在监测点,具体分布位置如图1所示。

图1 围护结构监测点布置
在基坑长边两侧每隔32 m布设1个观测墩,由内导对工字钢进行焊接,工字钢总长为5 m,夯入深度为4 m,在监测点附近安装灌注桩,尺寸大小为20 mm×20 mm×30 mm。根据图1所示的监测点和工作基点,应用Z字形的飞行方案,采用六旋翼无人机配置PLS8970型号激光扫描仪和工业照相机,设置的无人机飞行摄影参数见表1。

表1 无人机飞行摄影参数
分析处理扫描得到的点云数据,生成模拟围护结构顶部真实空间的三维点云,确定结构顶部的位移量。
2.3 实验结果分析
首先输入模型的基础数据,监测过程中不断更新模型监测参数的实测数据,使其监测水平方向的围护结构顶部的位移,监测结果如图2所示。

图2 围护结构顶部水平位移监测结果
当4种模型在各个监测周期中的监测值能够连接成线时,就可以判定监测结果符合围护结构顶部实际的位移情况;因此,当达到图2所示的监测值时,停止实测数据的更新。统计4种模型的数据更新量,实验结果如图3所示。
如图3所示,当设计模型输出围护结构水平位移的监测值时,每个监测周期的平均数据更新量为2 240 MB,基于双曲函数土体弹簧的围护监测模型平均数据更新量为2 990 MB,基于数值模拟的围护监测模型平均数据更新量为3 910 MB,基于MATLAB的围护监测模型平均数据更新量为4 230 MB,设计模型数据更新量分别减少了750 MB、1 670MB以及1 990 MB。竖直方向监测结果如图4所示。

图3 水平位移监测数据更新量实验对比结果
当模型输出监测值达到图4所示的数据时,无断点且能够表示竖直方向实际位移量时,停止数据量更新,此时已更新的数据量如图5所示。
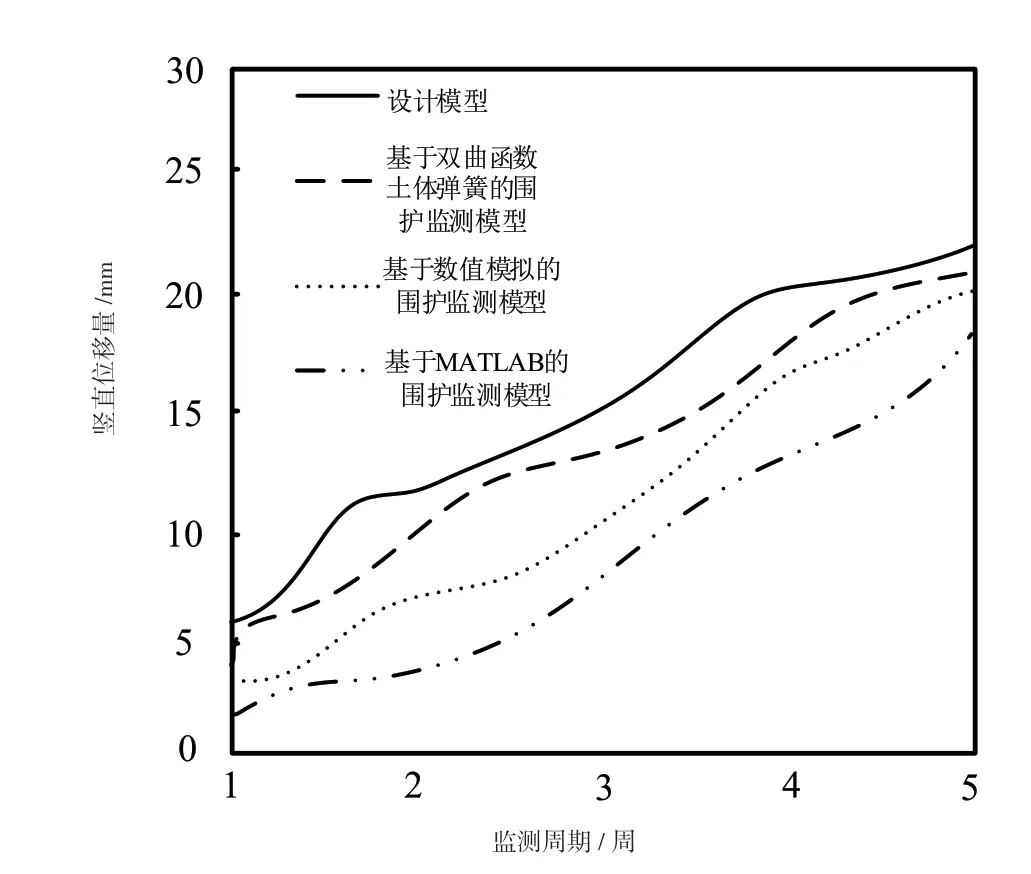
图4 围护结构顶部竖直位移监测结果
由图5可知,当设计模型输出围护结构竖直位移的监测值时,每个监测周期的平均数据更新量为2 520 MB,基于双曲函数土体弹簧的围护监测模型平均数据更新量为3 310 MB,基于数值模拟的围护监测模型平均数据更新量为3 960 MB,基于MATLAB的围护监测模型平均数据更新量为4 310 MB,设计模型数据更新量分别减少了790 MB、1 440 MB以及1 790 MB。综上所述,当该设计模型完成位移监测时,利用无人机巡检图像作为基础数据,并将其预处理后的结果作为围护结构顶部位移监测输入,可以使模型的更新数据量更少,减少了对实测数据的需求,降低了围护结构勘察的工作量。

图5 竖直位移监测数据更新量实验对比结果
3 结语
该研究利用无人机对围护结构顶部进行巡检,建立了一种位移监测模型,相比于常用模型,该模型降低了对围护结构勘察数据量的需求;同时,以无人机巡检生成图像数据作为模型输入,可以在一定程度上减少数据采集所耗费的时间,减少勘察的工作量。在今后的研究中,需要进一步讨论模型的适用条件,使用更适用的监测数据处理方法对围护结构进行有效反馈。