基于制动减速度的高速公路停车视距研究
2021-10-14吴善根林宣财潘兵宏
吴善根,李 涛,林宣财,潘兵宏,王 佐
(1. 中交第一公路勘察设计研究院有限公司,陕西 西安 710075;2. 长安大学 公路学院, 陕西 西安 710064)
0 引言
为提高高速公路的交通安全水平,公路设计应具有良好的行驶条件,确保驾驶人能够看清一定距离内的路面状况,以便在紧急情况下驾驶人能及时在路面障碍前安全停车。因此《公路路线设计规范》(JTG-D20—2017)(以下简称《路线规范》)规定“高速公路、一级公路的一般路段,每条车道的停车视距应不小于表1规定”。确保停车视距是保障道路交通安全的重要指标之一。相关研究表明事故率随行车视距增加而逐渐减小[1]。足够的视距能够给予驾驶人足够的判断和决策时间,是高速公路行车安全的重要影响因素。

表1 《路线规范》规定的停车视距
各国相关标准规范均对停车视距值进行了规定[2-9](图1),可以看出我国《路线规范》规定的停车视距值与日本规定值相同,但与其他国家规定值有较大差异。我国《公路项目安全性评价规范》(JTG-B05—2015)(以下简称《安评规范》)规定评价停车视距时,应采用运行速度检验,但《路线规范》条文解释中说明停车视距采用设计速度的折减值计算(设计速度大于等于80 km/h时,折减系数为0.85,60 km/h时的折减系数为0.9)。如此导致按照相同停车视距计算公式检验时,《安评规范》计算结果大于《路线规范》,二者之间存在矛盾。因此本文将在国内外相关研究的基础上,建立新的停车视距计算模型,并采用调查实验的方法对模型中关键参数进行研究,提出更合理停车视距计算模型和建议值。
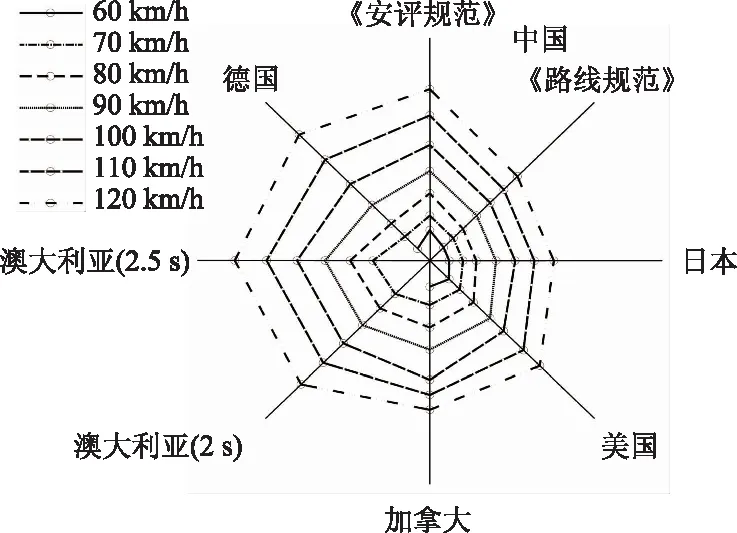
图1 各国小客车停车视距值对比
国外研究者对停车视距计算模型和重要参数展开了深入研究。D.Fambro等[10]基于驾驶人和车辆性能建立了停车视距计算模型,通过实际数据验证,推荐了不同车型的停车视距。Y.Hassan[11]等通过分析驾驶人的特性及道路线形等因素,建立视距计算模型。B.Crisman等[12]首次用车辆在遇到紧急情况时减速度代替轮胎与地面之间摩阻系数作为视距计算时的主要计算参数。G.Nehate,M Rys[13]建立基于GPS数据的停车视距新模型。Y.Hassan和T.Saye[14]通过对道路断面进行参数化分析,提出三维视距的数学模型和计算方法。国内研究者对停车视距的研究主要聚焦在视距模型理论的改进以及道路线形的检验方法。张驰等[15]根据道路中线的坐标方程和横断面参数,提出了公路三维视距检验技术。姜虹等[16]重新划分汽车制动过程并建立不同路面条件下的停车视距模型。杨永红等[17]通过运行速度和制动减速度对停车视距进行修正。荀双杰[18]建立停车视距检验模型,运用仿真平台对山区高速公路进行视距检验和评价。杨帆等[19]从3个方面对停车视距模型进行修正,并从目标物高度的角度出发,提出保证停车视距的建议。
国内外大多数研究者将85%的设计速度作为车辆运行速度计算停车视距,但随着我国多车道高速公路交通管理方式的改进,不同车型、不同车道运行速度呈现明显差异。故仅从《路线规范》条文里对视距值确定的解释已经不能完全说服设计者和使用者,应根据现阶段我国高速公路交通的运行特点,结合车辆的制动性能,对停车视距的计算模型进行改进。因此,本文将基于多车道高速交通运行特征,结合运行速度实测数据,在传统停车视距计算模型的基础上,重新细分汽车制动过程,建立停车视距计算模型;根据不同车型,结合不同制动减速度提出停车视距推荐值。
1 基于制动减速度的停车视距计算模型
1.1 传统停车视距模型
停车视距是指汽车在行驶时,驾驶人自看到前方障碍物时起,至障碍物前安全停止所行驶的最短距离。国内的停车视距理论计算模型如式(1)所示:
(1)
式中,ST为停车视距;v为行驶速度;tr为驾驶人反应时间;φ为道路附着系数;ψ为道路纵坡。由式(1)表明停车视距的大小主要取决于驾驶人反应时间、车辆行驶速度、道路附着系数、道路纵坡等参数有关。由于道路摩阻系数与轮胎条件、路面条件及制动条件相关,其规定值是在试验值的基础上得来。随着现代汽车工业的发展,新的轮胎和路面材料,以及汽车防抱死系统ABS的应用,并且我国《机动车运行安全技术条件》(GB7258—2012)规定我国的大型货车必须安装ABS系统,这些设备的产生与应用都大大提升了汽车的制动性能。道路附着系数不再能准确地反映出车辆的制动情况。美国AASHTO主编的《公路与城市道路几何设计》(以下简称《绿皮书》)从2001版开始已经运用汽车制动减速度来代替道路摩阻系数计算停车视距。
制动减速度是指车辆在行驶中迅速降低行驶速度直至停车的能力,是汽车制动效能的重要评价指标。同时我国制定了标准[20]明确规定了对各种车型汽车的制动减速度要求。制动减速度能更加科学、准确地反映实际行驶过程中车辆制动的情况。因此,本文主要将制动减速度作为关键参数,从车辆运动学角度构建停车视距计算模型,使停车视距计算更加合理。
1.2 汽车制动过程分析
为更全面考虑汽车的制动系统,需要将制动过程更加细化,考虑基于制动减速度的汽车制动模型。当驾驶人发现前方有障碍物时,车辆紧急停车或换道行为。根据《汽车理论》[21]将汽车制动过程简化如图2的4个过程。第1个过程为驾驶人意识到危险物以及脚从加速踏板移向制动踏板的过程,该过程所需的时间称为驾驶人反应时间t1;由于制动踏板存在自由行程、制动蹄与制动鼓间存在着间隙等因素,从踏下制动踏板经一定时间制动力才开始发挥作用,第2过程经历的时间为t2;第3个过程为制动减速度上升至最大值的过程,经时间t3达到最大制动减速度,将第2和第3个过程所需的时间统称为制动系统协调时间(t2+t3);第4个阶段为采用最大减速度制动的过程,经时间t4后车辆停车,该过程所用时间称为全制动时间。将制动减速度在制动力上升时间段的变化简化为线形递增过程。

图2 汽车制动过程
1.3 基于制动减速度的停车视距计算模型
(1)驾驶人在反应时间t1内行驶反应距离为:
S1=V0t1=V0T1,
(2)
式中,V0为汽车制动前的初始车速;t1为驾驶人反应时间;T1为反应时间结束时所对应的时刻。
(2)在制动协调阶段,汽车行驶距离是指制动踏板自由行程时间t2以及制动力上升时间t3的行驶距离[22],计算公式如下:

(3)
式中,S21为制动协调距离;V为制动力上升阶段任一时刻t的行驶速度,其计算公式为:
(4)
经化简得:
(5)
将式(5)代入式(3);可以得制动协调时间段的行驶距离为:
(6)
(3)车辆进入全制动过程,制动减速度保持恒定,车辆以最大制动减速度停车。由运动学原理可知:
(7)

则在汽车全制动的过程中车辆的行驶距离为:

(8)
式中,S22为全制动距离。经计算得:
(9)
结合式(2)、(6)、(9),并将车辆速度转化成千米每小时得到基于减速的停车视距计算模型,如式(10)所示。
(10)
2 停车视距推荐值
2.1 基本参数取值
(1)时间参数
根据AASHTO《绿皮书》的规定,驾驶人识别判断时间1.5 s,作用时间为1.0 s,所以反应时间t1可取2.5 s[2]。制动系统间隙消除时间t2很短,受驾驶人踩踏板的速度与制动系统构造影响,液压制动系统的反应时间t2为0.015~0.03 s。制动器作用时间不仅取决于驾驶人的反应速度还取决于制动系的结构,t2制动力的作用时间一般可取值0.2~0.9 s[21],本文t2+t3取0.2 s。制动踏板存在的自由行程时间t2取0.03 s。
(2)制动减速度
制动减速度的大小对停车视距结果影响较大。目前小客车直线平均最大制动加速度约为7.5 m/s2。AASHTO对45名驾驶人3 000次制动试验中,发现90%的驾驶人意外识别障碍物时紧急刹车所采用的减速度大于3.4 m/s2。本文参考各国路线设计规范(表2),一般地区最大减速度选用较为舒适的3.4 m/s2,积雪冰冻地区取参考薄冰状态的路面滑动摩阻系数0.1~0.25,取制动减速度为2.0 m/s2。澳大利亚[23]对制动减速进行了更为详细的分类,考虑了制动时驾驶人不同感受和实际操作状态。澳大利亚规定紧急状况下的制动减速度为4.51 m/s2,而停车视距考虑的应该是紧急状态时情形,因此本文参考澳大利亚设计规范取紧急制动时的减速度为4.51 m/s2。此外,根据相关研究可知,在紧急情况下小客车的最大减速度一般都能达到7.5 m/s2,货车最大减速度一般能达到6.5 m/s2[24]。减速度采用4.51 m/s2,约为小客车最大减速度的60%,货车最大减速度的70%,这样不仅给紧急制动留有富裕,减速度也不是特别大,给后车保留一定的制动距离,为避免追尾留有空间。因此建议采用基于制动减速度的停车视距计算模型,紧急制动减速度采用 4.51 m/s2。
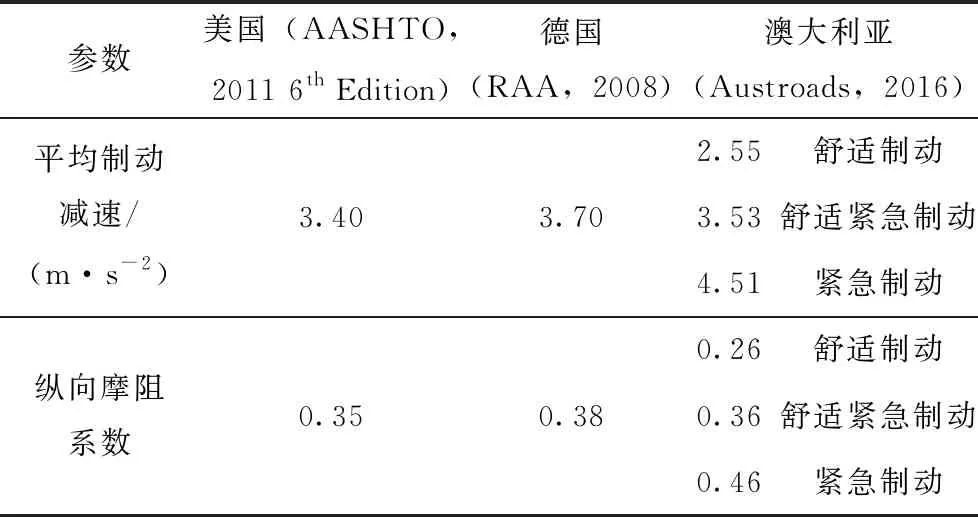
表2 国外规范中制动减速度参考
针对我国车型复杂多样的特点,我国汽车行业现行标准《机动车运行安全技术条件》(GB7258—2017)[25]中明确规定了各类车型在空载与满载状态下的平均制动减速度要求(表3)。由表3可知,最不利的减速制动情况为满载下的铰接客车、铰接式无轨电车以及汽车列车,但也要求制动减速度应≥4.5 m/s2。因此,本研究所取的紧急制动减速度正好满足我国各类同车型能完成紧急制动的需求,同时一般地区的制动减速度也能保证我国各类车型实现较为舒适的减速制动。
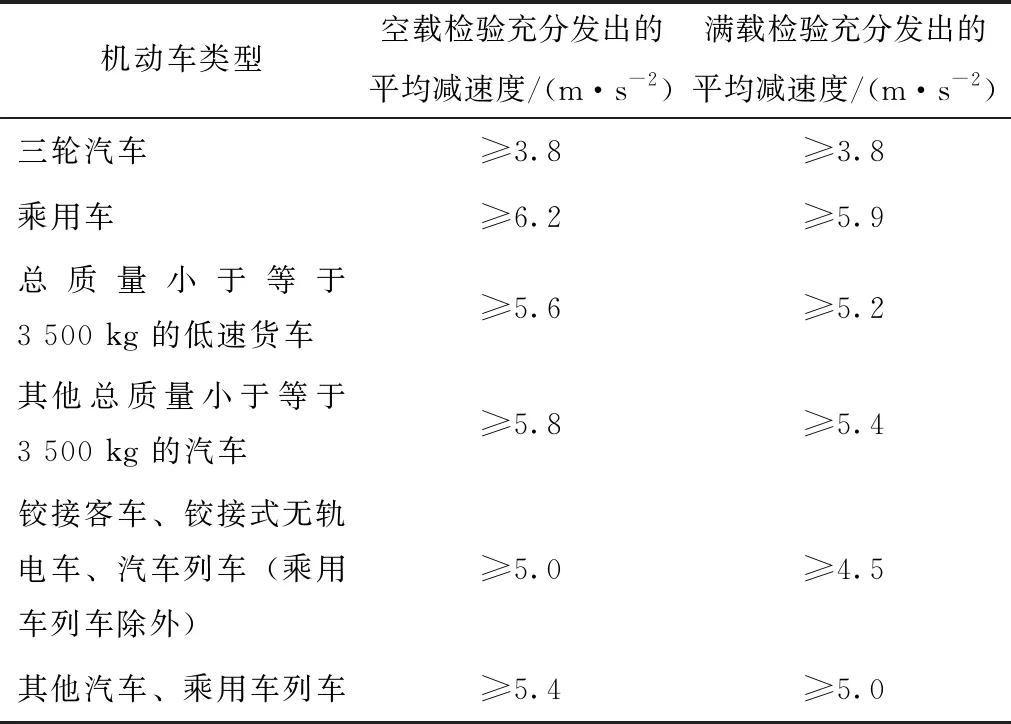
表3 我国汽车制动减速度要求
(3)运行速度
本文采用跟踪雷达对西安与广东周边多条高速公路上的运行速度进行调查(图3)。为避免驾驶人看见试验人员和设备产生警戒心理而引起驾驶行为异常,试验人员的调查位置尽量隐蔽。对有天桥跨越的主线,可隐蔽在天桥上,若天桥有遮挡,试验人员可选择在道路路侧护栏外对车尾进行测量,保证数据的有效性。采集过程中车辆不应出现严重的交通拥堵。为便于论述,将高速公路车道由内向外进行划分,分别为第1~4车道。分车道对速度采集结果进行分析,得到不同观测点各车道运行速度V85(表4)。

图3 车速调查示意图

表4 观测点各车道运行速度(单位:km/h)
从表4的实测运行速度结果可知:第1车道V85接近或超过设计速度,且每条车道的V85均达到或超过最高限制速度。运行速度由内侧车道向外侧车道呈递减趋势,最内侧车道车辆行驶速度最高,最外侧车辆行驶速度最低。从调查结果可以看出高速公路车辆实际运行速度一般不低于设计速度,随着交通管制的加强,运行速度会有所下降,但均远大于设计速度的85%。因此,为保障高速公路各车道车型行驶安全,应取运行速度较大的车道上车辆运行速度计算停车视距。故取第一车道运行速度计算停车视距,而第一车道运行速度接近设计速度,因此在计算停车视距时,宜取设计速度计算停车视距。当然,在安全性评价和分析中检验停车视距时,应根据实测运行速度检查停车视距,对停车视距视距难以满足运行速度的路段,可采取措施控制车辆的行驶速度,降低事故风险。
2.2 停车视距计算值
(1)平坡路段停车视距
结合上文所研究的运行速度调查、时间参数,采用相对舒适的制动减速度3.4 m/s2和紧急制动的制动减速度4.51 m/s2,用式(10)计算停车视距结果如表5所示。

表5 平坡段停车视距计算值
从表4中可以看出,当运行速度取设计速度,且减速取4.51 m/s2时,得到的平坡段停车视距与《路线规范》中规定停车视距基本一致。这说明目前《路线规范》中规定的停车视距合理。虽然结果与《路线规范》一致,但本文采用的速度是设计速度,未对设计速度折减。因此比《路线规范》条文解释中采用85%的设计速度更合理。
(2)纵坡路段货车停车视距
在纵坡路段,由于货车载重较大,货车制动性能受纵坡影响较大,因此纵坡较大的路段应对货车停车视距进行修正。当货车位于坡度路段时,货车受到的重力沿纵坡和垂直于道路的支持力方向分解,上坡路段沿纵坡方向的分力与地面制动力共同为上坡车辆提供制动力;下坡路段沿纵坡方向的分力会抵消部分车辆制动力,不利于车辆制动。车辆自身重力沿坡道的分力称为坡度阻力(图4),采用式(11)计算。
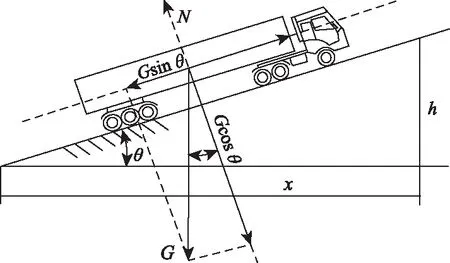
图4 货车纵坡方向受力图
Fi=Gsinθ,
(11)
式中,θ为坡度角,其与道路坡度的关系为:i=tanθ,i为道路坡度。G1为货车重力;m为货车质量。则:
θ=arctani,
(12)
(13)
垂直于道路方向的分力为车辆提供地面摩擦力,即:
Fb1=φGcosθ。
(14)
则车辆在纵坡上行驶时的总制动力为:
(15)
式中,CD为空气阻力系数;A为迎风面积;ρ为空气密度,一般取1.25 8 N·s2·m-4;V为相对速度在无风时车辆的行驶速度。
结合式(12)、(13)和(15)得:
(16)
采用式(16)可计算出不同速度下货车在的制动减速度修正值(表6)。
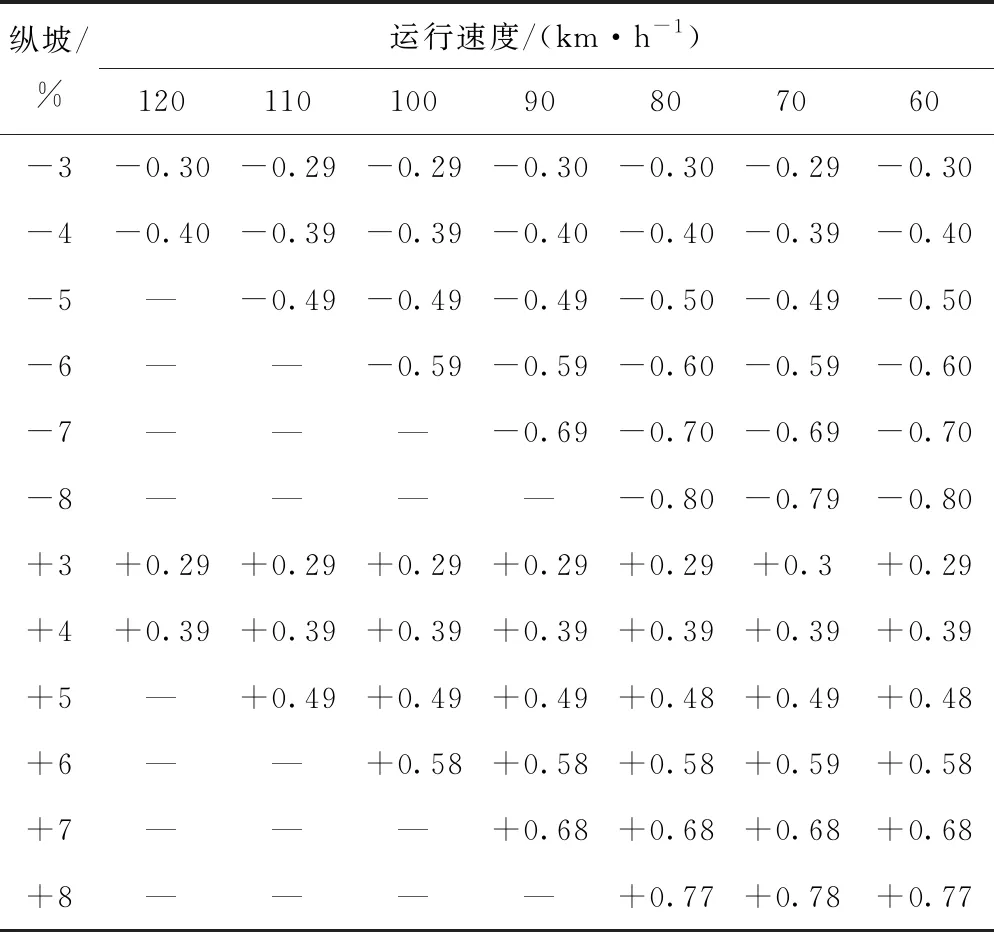
表6 坡度上货车制动减速度修正值(单位:m/s2)
根据式(10)与表5计算纵坡路段货车停车视距,用相对舒适的制动减速度3.4 m/s2计算结果见表7,采用紧急制动的制动减速度4.51 m/s2计算结果如表8所示。
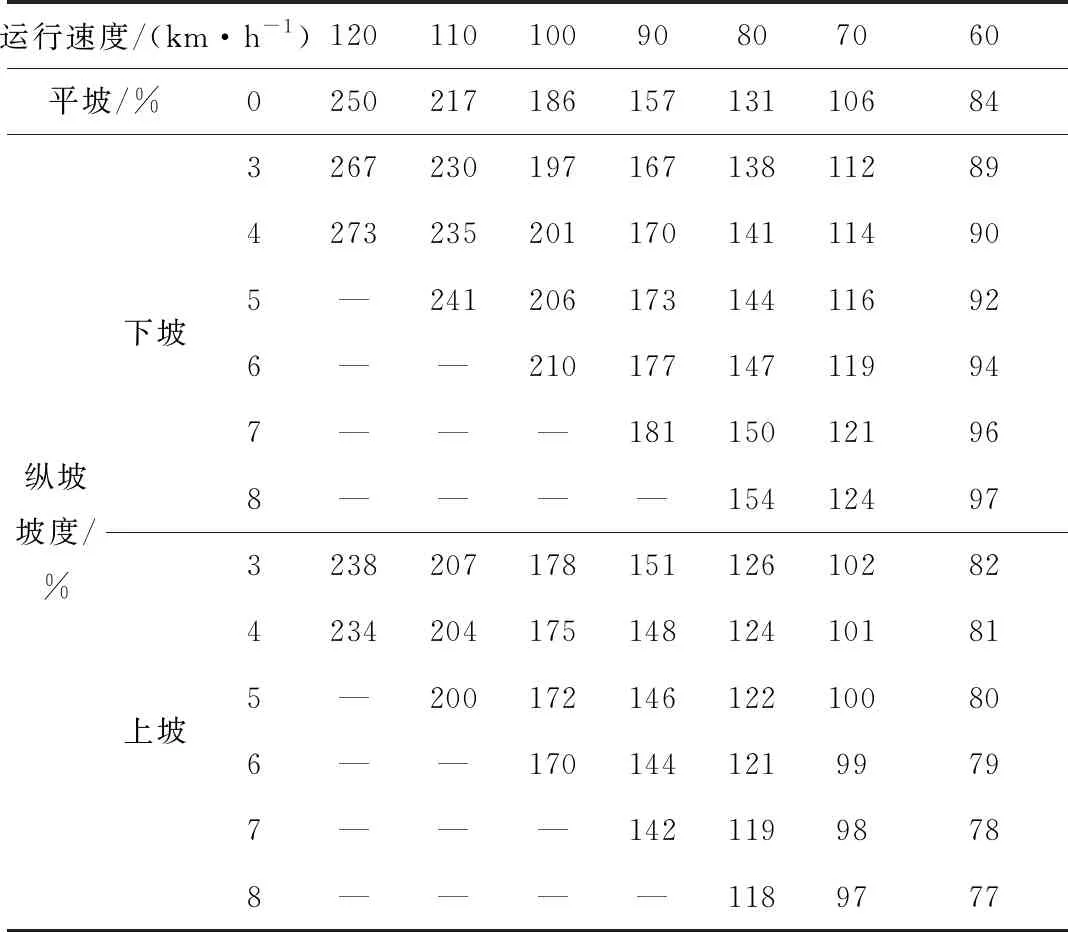
表7 制动减速度3.4 m/s2货车停车视距计算值
将表7和表8的计算结果与目前《路线规范》中下坡段货车停车视距对比可知:《路线规范》中停车视距长度介于舒适制动与紧急制动计算值之间,这说明《路线规范》规定的停车视距可保证驾驶人在紧急情况下安全停车制动,并留有一定的安全富余。
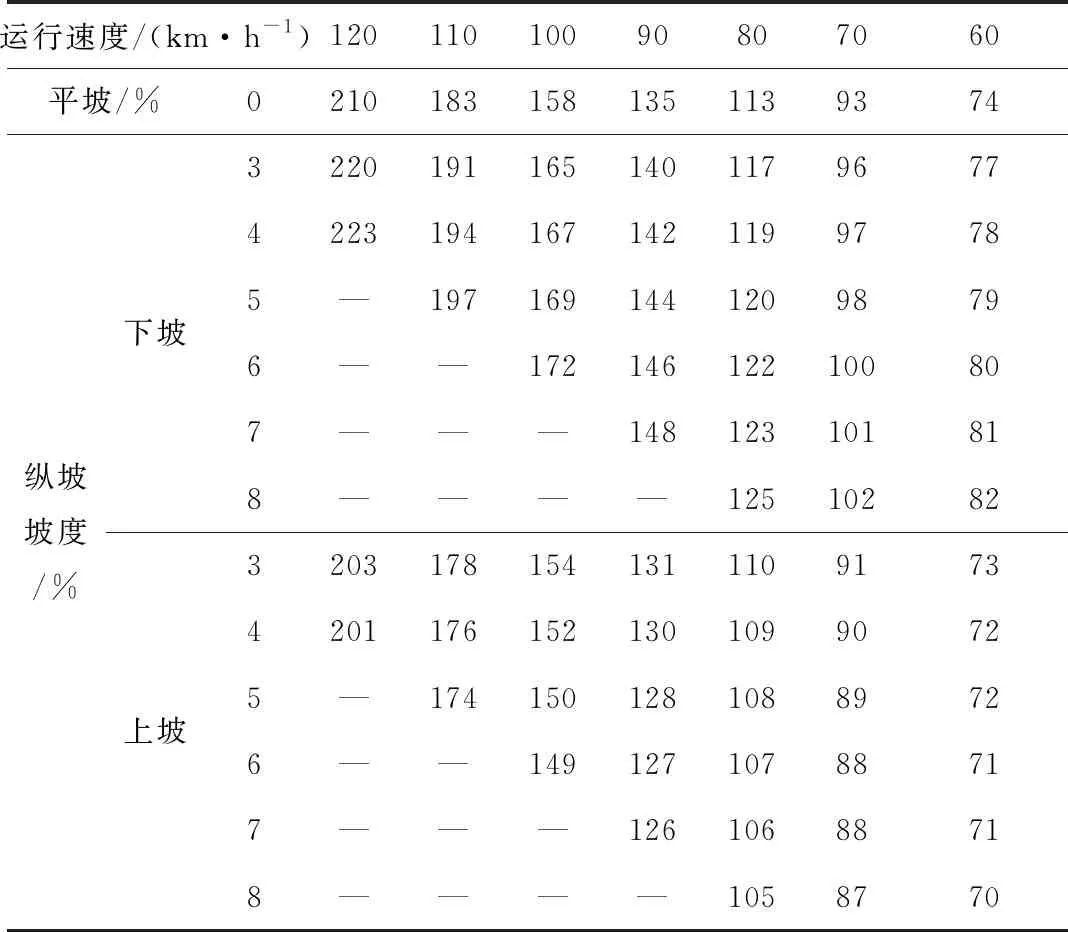
表8 制动减速度4.51 m/s2货车停车视距计算值
《路线规范》中对于上坡路段统一采用表3中停车视距规定,长度同样介于舒适制动与紧急制动计算值之间,同样说明规定值能保障驾驶人在紧急情况下安全停车,也留有一定的安全空间。但《路线规范》规定无法满足舒适制动停车的要求。
综上所述,采用舒适制动减速度值3.4 m/s2得到的不同纵坡下货车的停车视距值与规范值相近,并能为驾驶人提供舒适紧急制动的机会,所以纵坡路段停货车车视距采用表8的计算结果,而平坡段处于相对安全的行驶环境,货车停车视距采用表7结果与现有《路线规范》规定一致。
2.3 研究后提出的停车视距值
综合上述分析,研究后提出的小客车平坡路段停车视距值如表8所示;研究后提出的货车平坡和纵坡路段停车视距值如表9和表10所示。

表9 小客车平坡路段停车视距推荐值(取整为5 m)
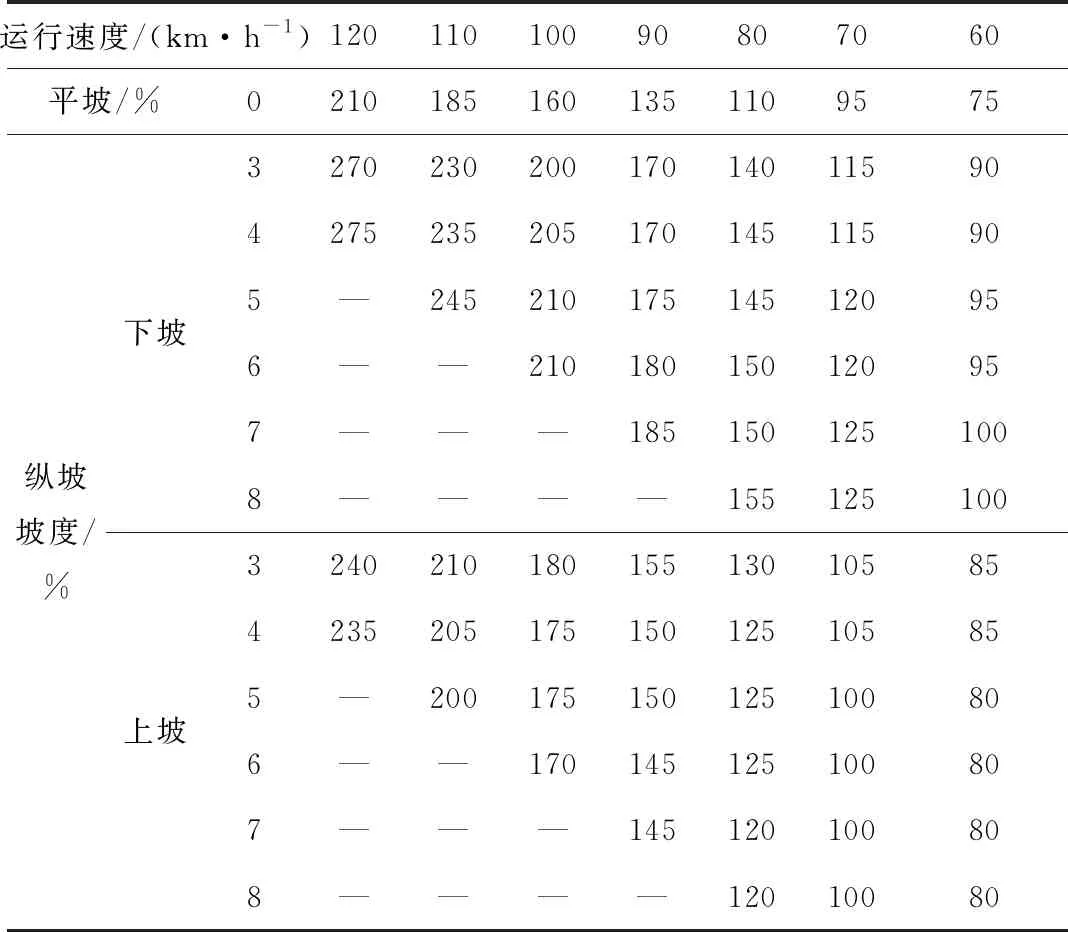
表10 货车平坡和纵坡路段停车视距推荐值(取整为5 m)
从最终推荐的停车视距研究结果看,利用基于制动减速度的停车视距计算模型,考虑了不同制动减速度。在平坡路段采取相对舒适制动减速度值得到的停车视距值与《绿皮书》中规定相差不大;采取紧急制动减速度值得到的停车视距值现有《路线规范》规定的平坡路段停车视距值基本一致,但解释不同。本文从制动减速度角度来解释,比目前规范条文中采用折减后的设计速度的解释更加合理。《路线规范》中规定的下坡段货车停车视距值介于采用紧急制动减速度与舒适制动减速度之间,并且更接近舒适制动减速度计算值。说明使用规范规定的下坡段货车停车视距时,能满足货车紧急停车制动的制动距离要求并留有安全富余。但不能满足货车舒适制动的制动距离要求。因为货车存在空载时制动性能差、轴间荷载难以保证均匀分布、一条轴侧滑会引发其他轴失稳半挂车铰接制动不灵等现象,同时受纵坡影响大,尽管驾驶人眼睛位置比小客车高,但仍需要比小客车更长的停车视距。因此,为避免货车紧急制动减速度时出现问题,纵坡路段主要以货车停车视距作为控制,对不同坡度下货车制动减速度进行修正,结合规范规定值提出了纵坡路段停车视距,以提高纵坡段安全性。
3 结论
本文结合高速公路实测速度数据、运动学原理从车辆制动减速度的角度研究了高速公路停车视距。基于车辆停车制动过程的特点,构建了基于制动减速度的高速公路停车视距计算模型。结合路段调查和各国对停车视距计算模型和参数的研究,对停车视距模型中的运行速度、减速度等关键参数进行了深入的探讨和分析,提出了平坡路段和纵坡路段货车停车视距建议值。研究结果显示:平坡段采用舒适制动减速度计算得到的结果与美国《绿皮书》规定值相近,采取紧急制动情况下的制动减速计算出的停车视距值与我国规范值相差不大。本文研究的主要成果如下:
(1)构建了基于制动减速度的高速公路停车视距计算模型。研究了模型中关键参数的取值。在车辆性能、路面材料与轮胎材料明显提升的情况下,改变传统依据轮胎与道路摩阻系数为制动减速度作为主要控制因素更符合实际。
(2)提出了在不同纵坡和不同设计速度情况下的基于制动减速的高速公路停车视距建议值,为目前《路线规范》中关于停车视距的计算原理说明提供了更合理的解释,并补充了上坡路段停车视距建议值。
(3)高速公路车辆调查行驶速度说明了《路线规范》条文中对设计速度折减的解释不合理,本研究采取用设计速度利用减速制动模型确定停车视距更加科学。
本研究基于制动减速度的停车视距计算模型采用的舒适紧急制动减速度与紧急制动减速度参数取值依据国外相关设计规范中的规定,下一步应进行车辆制动减速度的试验,进一步提高模型中参数取值科学性。
