高稳定度守时系统设计
2021-09-23刘朕智世鹏丁晓阳
刘朕 智世鹏 丁晓阳
(中国电子科技集团公司第五十四研究所 河北省石家庄市 050000)
精准的时间是同步的基础,同步是数字通信的基础[1]。随着数字化处理技术的发展,在无线通信、数字采集以及控制系统等领域中,对时间的同步精度要求越来越高[1-3]。由于北斗卫星中所搭载的原子钟可提供高精度的时间,因此,北斗授时已逐渐成为低成本高精度授时的首选方案。
但北斗高精度授时需要时刻接收卫星信号,给使用场景带来了较大的限制,本文利用北斗授时结合高精度守时算法,设计了高稳定守时系统,实现了在北斗无信号情况下的低成本高精度授时。
1 系统的组成与工作原理
1.1 系统组成
高稳定守时系统分为整体上分为三部分:北斗接收机部分、守时模块部分和电源部分。其中,北斗接收机完成北斗信号解析,获取精准的北斗时间,用于给守时模块进行授时和驯服。守时模块部分用于北斗信号无效时的守时和对外授时。电源部分为整个系统提供各种需要的工作电源。系统的组成框图如图1所示。
1.2 工作原理
北斗接收机接收卫星信号,获得电文中的精确时间信息,生成高精度1PPS脉冲信号和TOD时间信息,并输送给守时模块。
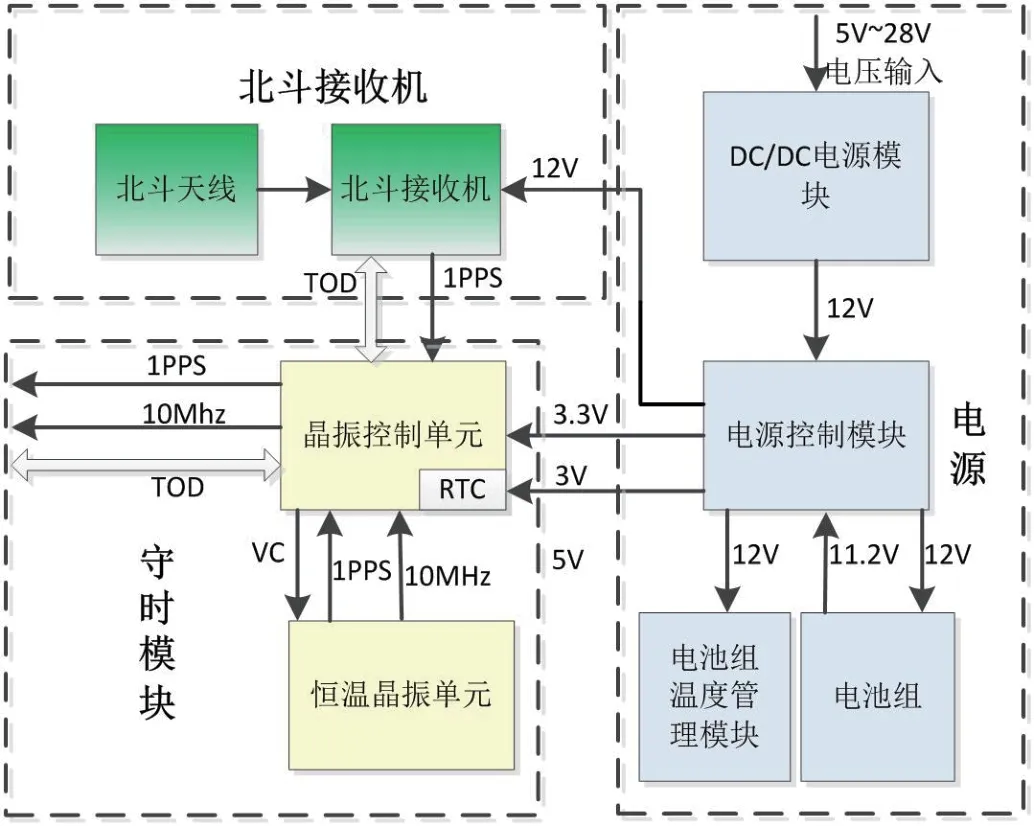
图1:高稳定守时系统框图
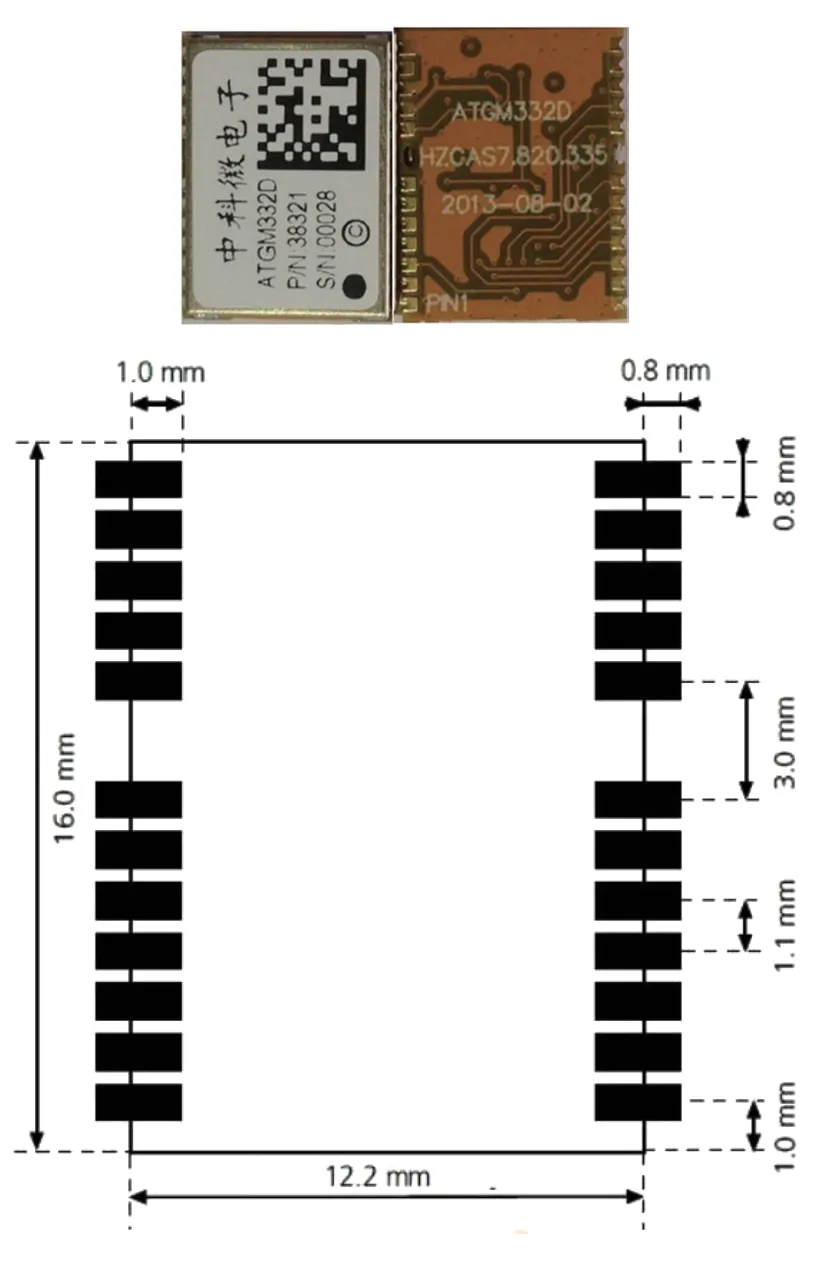
图2:北斗接收机模块实物及尺寸图
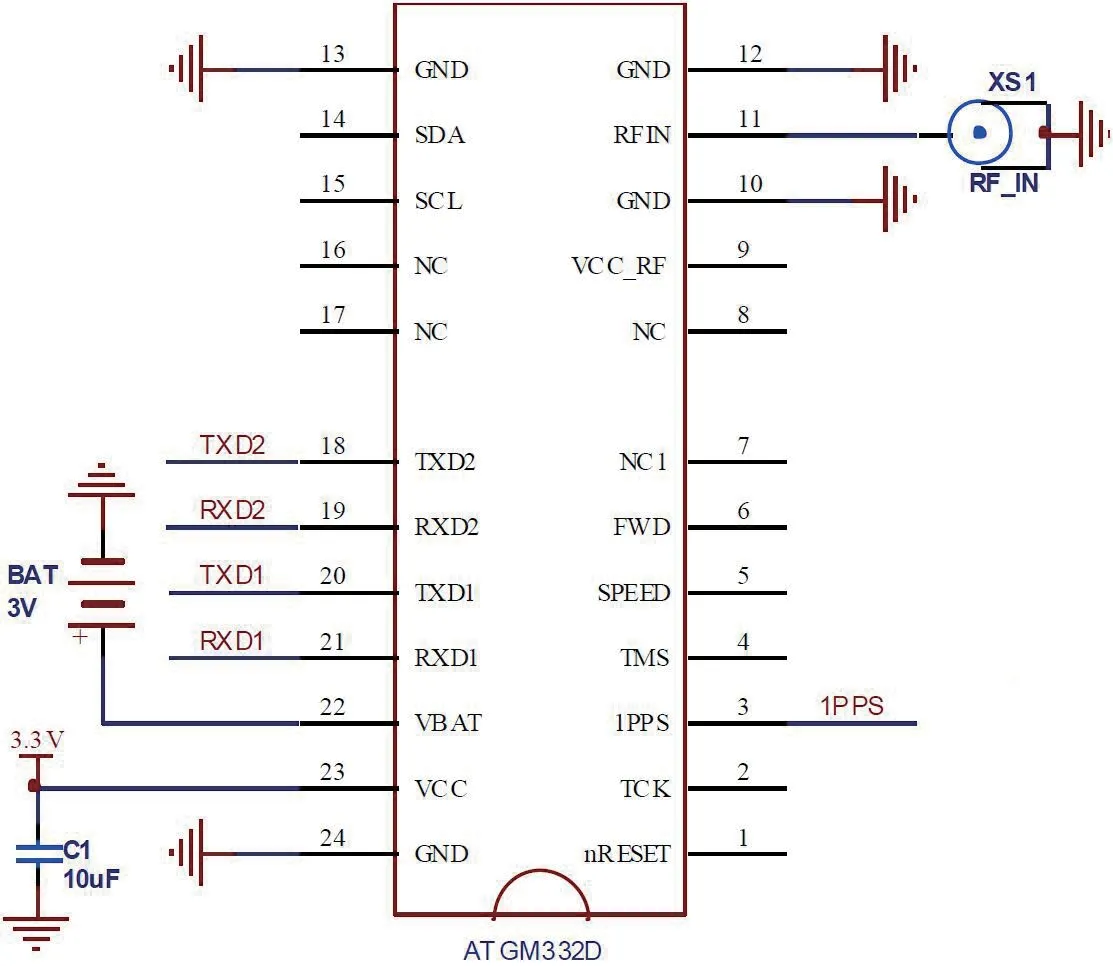
图3:北斗接收机典型电路
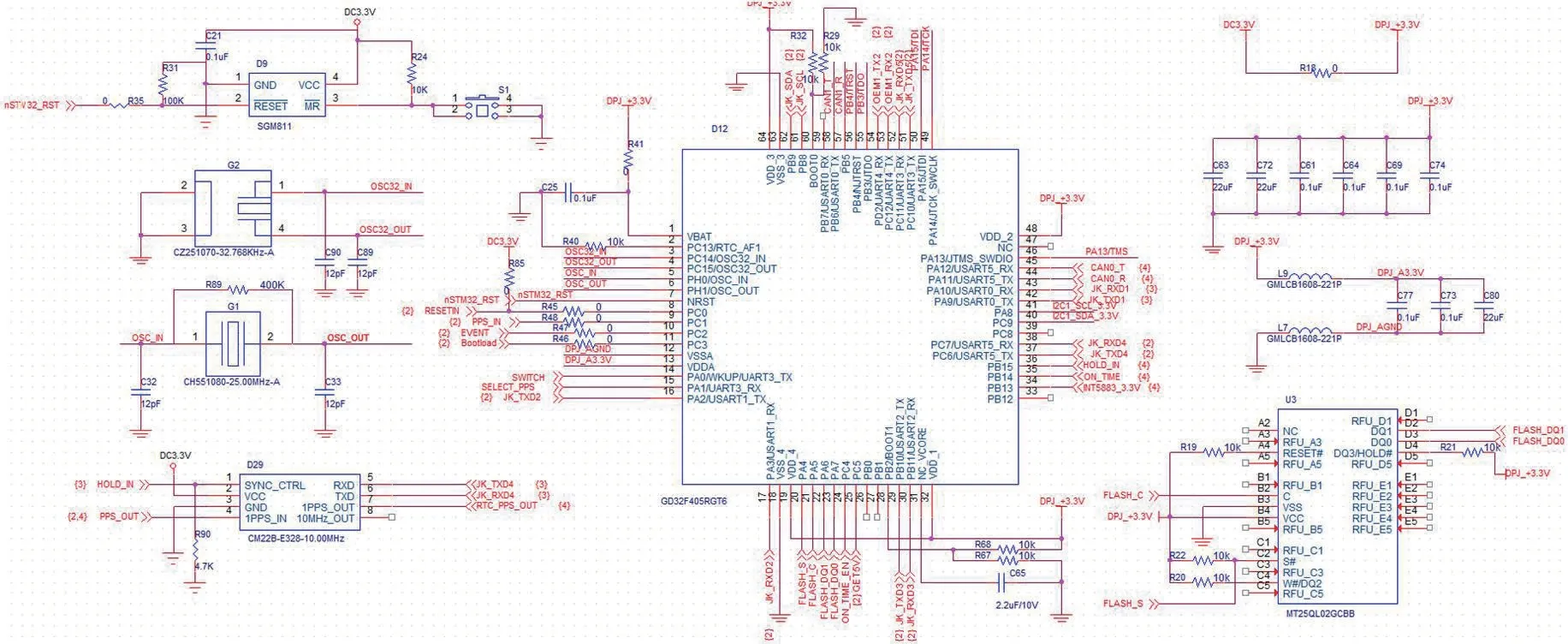
图4:守时模块电路原理图

图5:电源变换电路图
守时模块中的晶振控制单元测量北斗1PPS和晶振1PPS之间的误差,建立晶振的漂移模型,并计算频率修正值,通过调整电压控制晶振的输出频率,完成对晶振的驯服。内部RTC用于粗略时间的保持,结合晶振的误差模型及对晶振的频率补偿,获得精确的1PPS秒信号,完成对高精度守时功能。
电源模块中DC/DC电源对输入电源进行电压变换,电源控制模块形成各模块工作需要的电压,并给电池组充电。电池组在外部电源断开时,为整系统提供电源。实现证系统的断电守时功能。电池组温度管理模块监控电池组温度,在电池组温度过低时启动加热,温度过高时断开充电电源或输出电源,保证电池组的工作稳定性和安全性。
2 系统方案设计
系统的方案设计分为三部分:即北斗授时部分、守时模块部分和电源部分。北斗授时部分以北斗接收机为主,使用北斗接收机获得高精度1PPS秒脉冲信号和串口授时信号TOD,为守时部分提供时间基准。高稳守时部分以恒温晶振和控制单元为主,控制单元通过晶振的压控脚可调整晶振的输出频率,使晶振时刻输出高精度的1PPS和10MHz的信号,实现高精度时间的保持。电源部分对输入电源进行电压转换,为整个系统提供工作电源,保证整系统的电源特性。
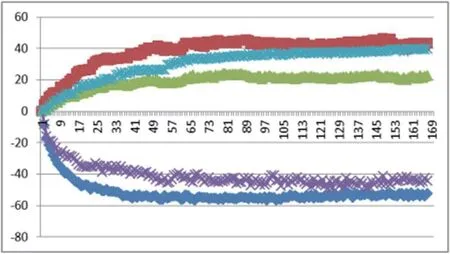
图6:5只典型OCXO的7天老化曲线(横坐标为时间,单位:hour,纵坐标为频率变化量,单位:E-10)

图7:OCXO精度曲线图
2.1 北斗接收机设计
北斗授时部分采用ATGM332D 高灵敏度北斗/GPS 双模接收机模块,包含 32 个跟踪通道,可以同时接收所有的 GPS 和北斗可见卫星。具有体积小,功耗低,成本低和灵敏度高的特点。北斗模块的实物及尺寸如图2所示。
北斗接收机模块主要性能参数如下:
接收灵敏度:-160dBm。
授时精度:50ns。
平均功耗:700mW。
北斗接收机典型电路如图3所示。
2.2 守时模块设计
守时模块是高稳守时系统的核心部分,在功能上分为恒温晶振单元和晶振控制单元两部分。
其中,恒温晶振单元使用恒温晶振OX36B-H-BR-V-10M作为核心,晶振控制单元输出控制电压VC施加到恒温晶振的压控管脚上,实现对晶振输出频率的调整。恒温晶振单元中的PLL电路将晶振输出的10MHz转换成1Hz的1PPS秒脉冲信号,用于对外授时。
晶振控制单元解析北斗接收机输入的TOD串口信号,得到年月日时分秒的信息,和北斗接收机的定位状态,用于选择是否继续使用北斗1PPS驯服晶振。
晶振控制单元采集晶振输出的1PPS和北斗1PPS之间的差值,对差值进行模型分析,建立晶振精度漂移的误差模型,计算晶振频率补偿量,并转换成电压信号VC,输出到晶振的压控管脚,调节晶振输出频率,完成对晶振的驯服过程。
守时模块电路图如图4所示。
2.3 电源设计
电源设计部分中DC/DC电源模块使用市场上成熟的升降压电源,电池组采用3节18650电池串联,电源控制模块将12V变换成各模块需要的工作电压。
电源部分电路原理图如图5所示。
2.4 晶振补偿算法设计
本系统的设计指标为24小时守时精度30us,由守时精度与频率准确度的关系如下式所示。

其中,ΔP:守时精度(ns),ΔF:频率准确度(ppb),T:时间(s)。
可知,ΔF≤ΔP≤ /T=0.347(ppb)。即补偿算法的频率准确度阈值设置为0.3ppb。
晶体的频率稳定性关于时间的数学模型可用下式表示:

其中,t为时间,T为温度,A,B为常数,f0为晶体额定频率。
由式(2)可知,OCXO的频率特性主要体现为老化特性(时间特性)和温度特性。一般情况下OCXO温度特性曲线不具备单调性且每一只OCXO的温度特性曲线都不一样,因此器件选型时选用了恒温晶振作为时钟源,晶体工作中的温度保持不变(在90℃左右),即可忽略温度对OCXO的频率影响,因此只需利用最小二乘法拟合老化特性中的常数A,B即可。晶体的老化特性曲线如图6所示。
3 试验验证与分析
选择两套设备设计了对比试验,其中第一套设备自由运行,验证晶体的老化特性,即频率漂移与时间的关系如图7(左)所示,以及经北斗驯服2小时后,守时24小时期间精度随时间变化的关系图7(右)所示。
由图可知,经过补偿算法处理后,晶体的24小时守时精度可达到3us,而自由运行状态下,24小时的精度只有600us。补偿算法对精度的改进效果明显。
对于大多数通信系统,1us的精度已能满足时间同步需求,因此,该系统允许长达10小时的断电情况存在。这也为该系统对便携式应用提供守时成为可能。
4 结束语
随着科学技术的发展,通信、导航、控制、航空等越来越多的领域需要精确的时间实现同步,授时和守时系统的应用也越来越广泛[4]。尤其在高精度守时方面,由于原子钟高昂的成本,难以在低成本领域内大规模使用,而成本相对较低的恒温晶振应运而生[5]。因此,对恒温晶振的特性研究和算法补偿也越来越受到人们关注,具有非常重要的意义[6,7]。
高精度守时系统选用了恒温晶振作为守时核心,恒温晶振由于工作的温度相对恒定,可尽量避免温度对晶振频率特性的影响,不仅保证了守时精度,而且简化了晶振的数学模型,降低了补偿算法的难度,通过2小时的北斗1PPS驯服,可达到24小时3us的守时精度,且具备断电守时的能力,具有广泛的应用前景。
