桥式吊车的优化PID控制设计
2021-09-22鲍广喜
鲍广喜
(安徽工程大学 计算机与信息学院,安徽 芜湖 241000)
目前桥式吊车在许多领域都得到广泛应用。但因其存在欠驱动特性,导致在台车的运动过程中会产生负载摆动。因此在其控制中要求台车迅速准确的到达指定位置且尽可能抑制负载摆动。为了对桥式吊车进行更加有效的控制,相关学者从多方面进行过尝试,设计了如输入整形[1]、线性控制[2]、非线性控制[3]和智能控制[4-5]等方法。
比例积分微分控制器(PID控制器)在控制领域得到广泛的应用[6-9]。PID参数整定是决定桥式吊车控制效果的核心技术之一。一般情况下,通过传统的理论分析和工程经验等参数调节方法可以较好完成控制目标。但对于复杂的控制对象而言,需要更精确的参数配置才能达到更好的控制效果。
在参考文献[10]中,研究者基于单片机运用PID设计了一种温控器,仿真实验证明了所设计的温控器具有较好的应用价值。除此之外,为了提高车辆行驶和操作稳定性,文献[11]提出了用于工程车辆半主动悬架的增量式PID控制方法,有效提高了工程车辆的悬架性能。众所周知,在控制系统设计中,控制效果的好坏取决于对PID参数的整定。参数整定主要有两种途径,一是通过理论计算进行参数整定,为系统建立合适的数学模型,并对该模型进行理论推导计算参数。二是根据现场操作经验人为地对参数调整,但缺乏一定的精确性。随着仿生优化算法的深入研究,基于优化算法的PID参数整定受到越来越多的关注。在文献[12]中,作者采用BAS算法根据设定条件优化PID三个参数以调节直流电机的转速;为了获得令人满意的运行效果,文献[13]提出一种基于天牛须算法的PID自整定方法,利用天牛须算法强大且快速的寻优能力对速度环节的PID参数进行自整定;针对音圈电机PID整定精度不高、速度慢等问题,文献[14]中提出一种非线性聚集粒子群算法来精确整定PID控制参数,显著提高音圈电机的运行效率和稳定性。
遗传算法是模拟自然界遗传和选择的一种寻优算法,是一种智能优化方法。因其易理解和稳定性等优势被广泛应用在各个领域[15-20]。为了解决在数据量相对较大测试中,模糊测试输入样本集存在质量低、冗余性高和可用性弱等问题,王志华等人提出了启发式遗传算法,借助0-1矩阵,通过启发式遗传算法对样本的执行路径进行选取和压缩,从而获得优化后兼顾样本质量的样本集最小化,进而加快模糊测试的效率[21]。针对没有抓取目标分布情况下对工位点坐标进行优化的传统移动机械臂路径规划算法的低效率问题,一种基于改进遗传算法的移动机械臂拣选路径优化方法被呈现在文献[22]中,运用改进的遗传算法,在工作空间内对各个工位点位置坐标寻优,并且规划出移动机械臂抓取的最短路径和多工位点间移动的最短路径。
借助于遗传算法的诸多优点,本文根据桥式吊车系统特性设定相应的目标函数,然后运用遗传算法对PID参数优化调节,并将优化的后参数应用到桥式吊车负载控制过程。仿真实验表明,调整后的PID参数不论是在台车到达效率上还是抑制摆动方面都明显优于未优化的PID控制器。
1 基于GA优化算法PID参数整定
1.1 PID控制器及参数范围
PID控制是一种闭环线性负反馈控制策略,通过对回路中的误差信号进行调节,从而消除系统误差达到控制效果。相应的数学描述为:
(1)
式(1)中,u(t)表示控制输出结果,e(t)表示误差信号,Kp表示比例系数,Ti表示积分时间常数,Td表示微分时间常数。
1.2 目标函数设置及其参数优化
桥式吊车吊运负载时,当负载快速吊运到目的位置的同时保持一个最小的摆动。相应的目标函数定义为:
(2)
式(2)中,t表示时间,x表示位移,θ表示负载的摆角。
遗传算法是一种基于自然选择和群体遗传机理的一种搜索算法。该算法对于PID控制器的参数进行二进制编码、选择、交叉、变异等基本操作。基于遗传算法的理论,本研究以求解目标函数最小值问题为例,该算法实现步骤表述为:
Step1:初始化GA参数(最大迭代数G,种群规模N,交叉概率P_c,变异概率P_m)。
Step2:对种群中的个体按照一定参数范围进行二进制编码。
Step3: 设定适应度函数并计算每个个体的适应度函数值。
Step4:按照轮盘赌和精英保留策略进行选择操作。
Step5:执行单点交叉操作生成新的交叉个体。
Step6:按照一定变异概率随机指定一位进行变异操作。
Step7:判断是否满足结束条件,若不满足返回Step2继续迭代,满足则算法结束。
在此基础上,根据给定目标函数公式,运用GA优化算法对PID参数进行调节,相应的优化步骤和流程图如图1所示。

图1 PID参数优化算法流程图
Step1:初始化GA优化算法参数(G=200,N=20,P_c=0.6,P_m=0.01)。
Step2:根据设定的PID控制器的参数范围对PID参数进行二进制编码。
Step3:计算每组参数在桥式吊车负载控制中的目标函数值。
Step4:按照轮盘赌和精英保留机制进行选择操作。
Step5:执行交叉和变异操作生成新的种群,并计算其目标函数值。
Step6:进行迭代循环直至满足设定,并最终找到最优参数值。
2 桥式吊车系统描述及仿真实验
2.1 二维桥式吊车系统描述
如图2所示,桥式吊车控制系统主要由台车、桥架轨道、吊绳、负载以及桥式吊车动力控制系统构成,台车通过吊绳连接其下方负载,台车可以在桥架轨道上进行水平运动。

图2 二维桥式吊车
根据图2不难看出,桥式吊车动力控制系统可以直接控制台车的移动过程。而通过吊绳与其相连的负载随着台车的移动而移动,同时具有一定的摆角,当台车速度变化时,负载随之发生振荡。然而由于难以直接对负载进行控制以抑制其摆动,从而避免意外发生,只能通过控制台车间接控制负载。该系统自由度的维数比控制向量的维数大,是一种欠驱动非线性系统,为此,需为其建立一个有效的动态模型。其动力学方程如下:
(3)
(4)
2.2 桥式吊车Simulink 仿真实验
根据上述描述的吊车系统的微分方程,运用MATLAB中的S-Function建立桥式吊车模块,并运用上述参数优化步骤对PID控制器参数进行优化,并运用优化出来的PID参数在不同负载重量和期望位置进行模拟仿真,结果如图3、图4所示。
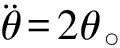
图3 期望位置为3 m、负载重量为3×103 kg时的仿真结果

图4 期望位置为5 m、负载重量为5×103 kg时的仿真结果
根据上述仿真结果可知,通过GA优化算法调整后的PID控制器在负载的位置控制上,能够让负载迅速的到达设定的期望位置,负载摆角的幅度得到了有效的控制,说明这种设计可提高货物运输过程的安全性。
3 结论
由于桥式吊车系统的自由度大于控制量的维数,这种欠驱动特性给控制过程带来很大挑战。因此,为了提高桥式吊车PID控制器控制效果,本研究提出了一种基于GA优化算法的参数整定方法。在研究过程中,根据桥式吊车输出特性,设置相应的适应度函数,然后运用GA优化算法对PID参数进行优化调节。最后将得到的最优参数应用到桥式吊车的负载运送控制过程。通过仿真实验,结果表明优化后的控制器比没有优化的在性能上得到显著提高,从而进一步证实了该方法的有效性。除此之外,该参数整定方法也可以应用在其他的工程领域的控制过程中。
