变电站密闭空间中设备故障的智能判定方法
2021-09-13彭志远谷湘煜周仁彬鲜开义杨利萍梁洪军
彭志远,谷湘煜,周仁彬,鲜开义,杨利萍,梁洪军,邹 娟
(深圳市朗驰欣创科技股份有限公司,深圳 518000)
变电站设备种类和数量众多,且为了提高防护性和安全性,大多安放在密闭箱柜、沟道等封闭空间[1]。随着机器人技术的快速发展,巡检机器人在日常的巡检工作中得到了广泛应用,但是现有的机器人系统难以有效进入封闭空间,并且需要后台人员实时监控数据变化,无人化程度较低。为了提高系统无人化程度,邵庆祝等[2]基于长短期记忆网络(long short term memory,LSTM)模型对配电网单相接地故障进行故障辨识;徐家慧等[3]则使用网络复杂度更低的门控循环单元(gated recurrent unit,GRU)网络对电网告警信息进行了分类;杨济海等[4]为了提高效率,对传统LSTM模型进行改进,使用并行的F-LSTM网络进行了故障预测;王磊[5]则使用混动蚁群优化算法对LSTM网络进行优化,完成对高压断路器故障的预测;Peng等[6]使用3 dB的小波对故障信号进行分解,基于稀疏自编码神经网络构建深度学习网络,计算出子带能量作为深度学习神经网络的参数,完成对电力线缆的故障诊断。但是这些方法大多集中在网络的或者算法的研究,与实际问题结合不够紧密。
以自研的一套变电站巡检系统(系统结构如图1所示)为基础,首先分析了变电站密闭箱柜、沟道中设备的巡检需求以及相应的物联网终端构建方式;其次,确立了各项传感数据的采集、处理和标注方法;再次,为了提高收敛速度,获取最优解,基于GRU网络结合粒子群优化(particle swarm optimization,PSO)优化算法构建基于PSO-GRU网络的变电站各项设备故障的智能判断方法。最后,通过实验对LSTM、GRU和PSO-GRU网络进行了对比,证明了算法兼顾了快速性和准确性。
1 密闭箱柜、沟道的巡检需求分析和物联网终端构建
变电站日常的箱柜巡检主要是对端子箱、检修电源箱、汇控柜、开关机构箱、刀闸机构箱、灭火装置柜等进行巡检;沟道巡检主要对通信、控制、信号、电源、动力线缆等线缆情况进行巡检。总体来说,可以分为参数类检测和设备状态类检测两大类,具体如表1所示。

表1 日常巡检需求及分类
对于参数类数据,通过诸如温湿度传感器、红外测温仪、触点开关、水位传感器等终端进行采集;对于状态类数据,使用可见光相机进行图片采集,结合图像处理算法获取相应参数值。
2 数据的采集、处理与标注
通过上述物联网终端设备的反馈数据构建D={Hi,Tj,Sk,Wm,Cn},其中H、T、S、W、C分别表示湿度值向量、温度值向量、触点开关开合状态向量、水位高度值向量和状态类数据向量;i、j、k、m、n分别表示对应各类传感器个数,即向量的维度。状态类数据向量通过现有的图像处理、图像显著性检测方法[7-8]等获取被测物体的完整性、脱落、积尘、锈蚀、绝缘老化、指示灯、分合闸等状态均转换为异常情况概率P∈[0,1],通过现有图像识别算法[9-10]识别仪器仪表的各项参数值。通过此流程,即可获取一组完整的数据值。
以时间间隔θ进行一组完整数据的采集。多次采集完成后,以时间维度对数据进行z-score[10]标准化,计算公式为
(1)
由于所使用算法为有监督学习方法,因此需要对数据进行标注。通过专家经验对采集的数据进行标注,因为故障的出现有相关性并且其严重程度有区别,因此一组z-score规范化后的数据标注为4维向量Tag={f1,f2,f3,l},其中,f1、f2、f3为最有可能的故障类型的前3种,l∈{非常严重,严重,一般,可能}为严重程度。为了便于后续网络训练的应用,从0开始依次对故障类型f进行编号,对严重程度同样从0依次编号,并对二者进行Embedding编码,对每个故障类型和严重程度编码为8位嵌入词向量,因此Tag将转换为含有32个元素的向量。
3 基于PSO-GRU网络的故障判别方法
3.1 GRU网络
封闭箱体和沟道内各个传感设备的参数以时间轴为序列排布,且故障的发生与前一段时间内各项参数有密切联系。循环神经网络(recurrent neural network, RNN)是处理时间序列数据的一种有效的网络结构[11], LSTM网络是RNN的一种扩展,可以有效解决常规RNN的梯度消失和梯度爆炸问题[12],其中含有输入门、遗忘门和输出门的门控机制分别控制输入值、记忆值和输出值,GRU模型[13]中只有更新门和复位门,因此结构更加简洁,参数更少,训练速度更快。GRU典型结构如图2所示。

图2 GRU单元结构
xt、ht分别为GRU单元的输入和输出,ht-1为上个单元的输出。各参数的推导公式分别为
更新门:
zt=σ(Wz[ht-1,xt])
复位门:
rt=σ(Wr[ht-1,xt])
(2)
记忆:
ht=tanh[W(rtht-1,xt)]
(3)
输出:
(4)

3.2 PSO优化算法
粒子群优化算法[14]是基于个体之间信息的共享和协助来进行整体的迭代更新,寻找最优解。可以进行如下的描述:存在一个搜索空间M,维度为m,存在一个种群X={x1,x2,…,xn|xi=(xi1,xi2,…,xim)},在时刻t时,种群的位置、速度以及个体、全局的最优位置分别为
(5)
根据个体和全局最优位置,粒子群依据式(6)、式(7)进行更新。
t+1vid=ωtvid+r1c1(tpid-txid)+r2c2(tPid-txid)
(6)
t+1xid=txid+t+1vid
(7)
式中:ω为惯性因子,是一个非负值;r∈(0,1)为随机数;c为学习因子;vid∈[Vmin,Vmax];xid∈[Xmin,Xmax]用于保证速度和位置不会超限。式(6)中ωtvid用于记忆上次速度的大小和方向;r1c1(tpid-txid)为个体当前位置与最好位置的位矢,表示个体自身经验;r2c2(tPid-txid)为个体到种群最好位置的位矢,表示种群的协同合作。
惯性因子关乎寻优能力的强弱,值越大,全局寻优能力强,但局部寻优能力弱,反之亦然。因此为了平衡二者,使用线性递减权值(linearly decreasing weight, LDW)方法[15],可表示为
ωt=(ωinit-ωend)(K-k)/K+ωend
(8)
式(8)中:ωinit、ωend分别为初始权值和最终权值,一般分别取0.9和0.4;K为总迭代数;k为当前迭代数。
3.3 网络结构与算法流程
由于封闭箱体和沟道内传感设备众多,人为的很难设定GRU的单元个数、时间窗口和批处理数据大小的最优值,因此通过PSO方法,将此三者作为一个粒子群,寻求最优解。网络结构如图3所示。

图3 PSO-GRU模型结构
PSO算法寻求最优解的适应度函数f定义为
(9)

算法流程如下。
Step 1将2中采集的数据分为训练集和测试集。
Step 2以GRU单元个数、批处理数据大小、时间窗口为优化对象,随机初始化每个粒子和惯性因子。
Step 3根据式(9)评估所有粒子的最优位置p,得到全局最优位置P。
Step 4while not stop根据式(6)、式(7)更新粒子的速度和位置,根据式(6)更新惯性因子。依据图3的网络结构构建PSO-GRU网络模型,其中超参数使用更新后的粒子;从训练集中随机平均抽样少量数据训练GRU网络直至收敛;根据式(9)计算f,如果f在可接受范围内,退出循环,保存网络模型即为最优超参数网络模型。
Step 5根据保存的PSO-GRU网络模型,使用全量数据进行训练至模型收敛。保存收敛后模型进行后续实际工作中的故障判别。
4 仿真验证
为了验证所提方法的可行性和有效性,使用两种方法建立数据集用于训练PSO-GRU网络。在某实际场景中,各类传感器个数i、j、k、m、n分别取值45、45、469、36、753。因此训练集每条数据维度为 1 348,时间间隔θ取5 s。依据专家经验,本场景中常见故障有:表计异常、指示灯状态异常、二次线接触状态异常、器件标识及状态异常、箱柜密封异常、柜内触点即设备发热异常、柜内积水、柜内温湿度超过预警值、沟道线路外观破损、沟道完整性异常、氧气含量超过预警值、硫化氢含量超过预警值和甲烷含量超过预警值,共13种异常场景,根据其中对故障严重程度的划分,故障类型共52种。对一类故障在一个时刻发生的前后采集不少于30次的数据并进行z-score归一化,打上故障类型的标签,作为数据库的一条数据。最终,经过筛选,确定数据库共10 000条数据,涵盖所有类型故障及正常运行情况下,随机平均抽样500条数据作为最终GRU网络的测试集,剩余9 500条作为GRU网络训练集。
基于Tensorflow1.14.0构建网络模型,使用4张NVIDA P40显卡作硬件资源进行实验并与LSTM网络和GRU网络进行对比。PSO-GRU的各项超参数设置如表2所示,LSTM网络和GRU网络的超参数根据经验设定。
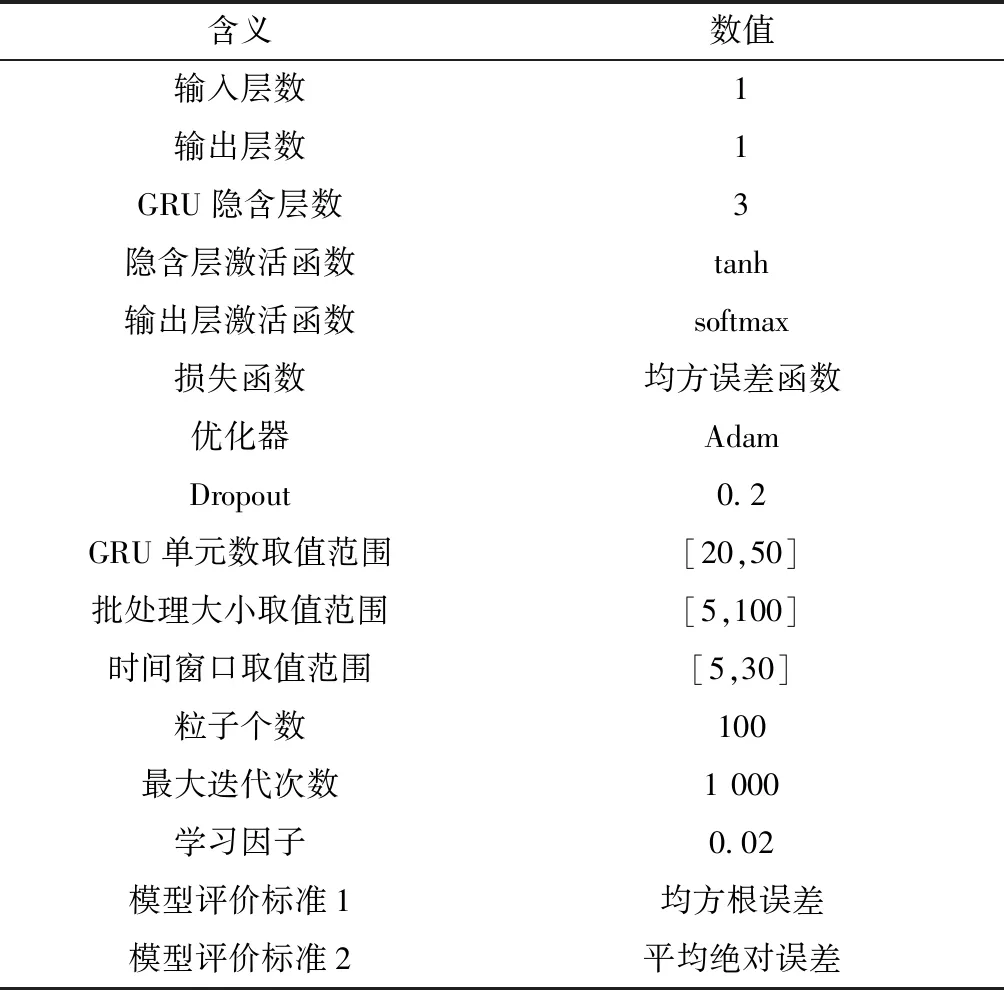
表2 实验参数设置
首先从9 500条GRU网络训练集中随机平均抽样500条数据使用PSO优化算法训练GRU网络最优超参数,此处训练是较为简单的优化问题,因此仅需少量训练数据即可。每次更新超参数后的GRU网络经过1 200次左右的迭代可以完成收敛,最终PSO优化算法经过640次左右循环得到的GRU网络最优超参数,此时适应度f最小约为1.5,3层GRU隐含层节点数分别为36、42、28;时间窗口大小为25;批处理大小为88。适应度f的变化如图4所示。

图4 PSO算法获取最优GRU参数训练过程
依据最优GRU超参数,使用全量训练集训练GRU网络,经过约8 440次迭代,GRU网络完成收敛,其损失函数的变化如图5所示。

图5 最优超参数下GRU训练过程
LSTM网络、GRU网络及PSO-GRU网络的各项指标对比结果如表3所示,可以看出,PSO-GRU网络由于需要使用500条训练数据不断的进行小规模的训练,寻求最优超参数,因此耗时较长。但是其核心的模型评价指标均方根误差(root mean square error,RMSE)[13]与平均绝对误差(mean absolute error,MAE)[14]均有明显下降,基本达到LSTM网络和GRU网络的1/2。RMSE和MAE的计算公式分别为

表3 3种方法的对比结果
(10)
(11)
式中:n为采样次数;h为观测值;y为真实值。
由于PSO算法为GRU网络训练了更为合理的各项超参数,相比于人为根据经验设定的超参数的GRU网络,其故障判定耗时有13.1%的下降。由此可以证明,本文方法在故障判定的准确性和耗时方面有明显提升。
5 结论
以提升变电站智能化水平为目的,挖掘现有的变电站智能巡检系统的痛点以变电站密闭箱体或沟道的故障判定为研究课题展开。首先分析巡检需求,依托物联网终端数据构建数据集,介绍了数据集的采集、处理和标注方式;其次在介绍GRU网络、PSO优化算法的基础上提出了基于PSO-GRU的故障判定方法,介绍了网络结构和相应算法。最后通过实验对比了传统LSTM网络、GRU网络及本文方法之间的各项指标参数。实验表明,本文方法在故障判定的准确性和快速性上均有提升。
