异步电机矢量控制技术在矿井通风机监测和调节系统中的应用
2021-09-08吴亚南
吴亚南
(华阳集团机电设备管理中心,山西 阳泉 045008)
引言
矿井通风机系统被称为“矿井肺脏”,能给矿井提供足够的新鲜空气,调节矿井内部环境的湿度和温度,稀释或排除井下的有毒气体和粉尘。当矿井通风系统运行发生意外时,将直接影响矿井的正常运行和井下工作人员的生命安全,因此,建立安全高效稳定的矿井通风机监测和调节系统是十分必要的。矿井通风机系统由电动机、联轴和风机组成,一般由三相异步电动机带动风机给矿井通风。前期多采用人工监控方式监测通风机的运行状态,可靠性低、能耗高、人工成本高,因此,建立自动化的矿井通风机监控调节系统是一个重要的研究课题,它可以实现在线监测、远程控制、自动报警、数据联网等功能。由于目前矿井采用恒定转速的电动机,风机输出量不变,无法满足实时调节风速的要求,并且效率低、电能消耗大[1]。而通过交流电动机能够调节风机的风速,一般采用变频调速,实现变频调速的三种方式有U/F 控制方式、矢量控制方式和直接转矩控制,其中矢量控制方式具有良好的动静态性能,广泛应用于矿井通风系统交流电机的调速[2]。本文提出了一种以PLC 为核心的智能通风机化监测和调节系统,该系统采用了先进的异步电机矢量控制技术,同时为改善矢量控制对参数的敏感性,引入了具有强鲁棒性的变结构控制理论[3-4],提高监控系统的稳定性和可靠性,节约了能源。
1 通风机监测和调节系统的构成
图1 所示为通风机的监测和调节系统结构图,该系统由上位机和下位机组成,下位机负责数据采集、状态判断和输入输出控制,上位机负责数据存储和分析处理、状态显示和打印输出,通过该系统地面工作人员能够准确掌握通风机的工作状态,实现远程监控。监测系统主要任务是通过温度、压力等传感器实时采集关键部位的温度、压力和风量,调节系统的主要任务是基于监测系统对风机风量的监测,根据不同的生产条件,通过变频技术来调节电动机的转速,达到对风量的灵活控制。图1 为通风机的控制系统,与监测系统不同的是,调节系统添加了变频器,将额定的工作频率转变成目标频率的交流电源,然后实现电机的变速运行。系统硬件采用西门子S7-300 系列PCL,CPU 为CPU312,扩展模块为EM332;PLC 组态的编译由STEP7 编程软件完成,上位机人机界面使用WinCC 编译,上、下位机的通讯由MPI 通信协议完成,经济实用。
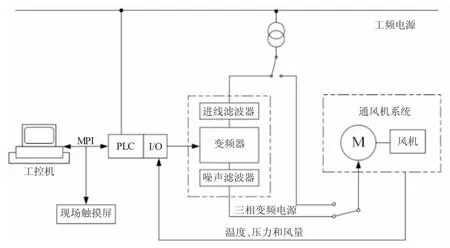
图1 矿业通风机监控和调节系统结构图
2 异步电机矢量控制技术的研究
2.1 异步电机的矢量模型的建立
电机速度控制的关键是电磁转矩,直流电机由于电枢电流Ia和转矩电流If不存在耦合关系,任意单一变量就可以控制电磁转矩,而交流电机含有多个变量,耦合情况复杂,因此需要对变量解耦才能控制电磁转矩,这也是矢量控制的核心。本文基于坐标系变化理论,将原先a-b-c 坐标系下的异步电机模型转换为d-q-n 坐标系,虽然消除了电感系数Laf的影响,但是无法实现与直流电机相似的控制效果;再将转子磁链定位在d 轴上,在转子的恒磁链约束条件下,电机方程得到明显简化,转矩、端电压、q 轴电流变量等均可直接由电源频率和转差频率表示,实现了转矩的解耦,得出了基于转子磁链定向的矢量控制模型,达到了与直流电机相似的控制效果,将该模型应用于鼠笼异步电机变频调速系统的设计,分别得出了电压型和电流型的控制理论。
2.2 异步电机的矢量模型的Matlab 仿真结果
在Matlab 仿真软件设置鼠笼式异步电机的运行参数:包括额定频率、额定电压、定子和转子相绕组电阻等。先输入给定转速值1 500 r/min,系统基于电压型矢量控制理论,由矢量控制器分别计算出三相电源的幅、基频角速度和初相位,而三相电源根据上述计算值生成相应的三相正弦波,再传递至三相电机,最终得出转速响应和转矩响应。本文模拟分析了开环和闭环控制的结果,根据实验结果综合分析,系统开环控制和闭环控制的稳态性能非常接近,但后者的动态性能要优于前者;在转速响应方面,开环控制的调节时间为0.3 s 远大于速度闭环控制的条件0.05 s,同时在超调量方面,闭环控制也低于开环控制;而根据不同条件的仿真波形,充分说明了矢量控制理论有利于三相异步电机的调速的控制。
2.3 异步电机矢量控制系统的优化
异步电机矢量控制系统使交流电机获得了与直流电机相似的调速性能,满足了现代化矿井通风系统的要求。但是由于矢量控制系统是基于电机参数进行计算的,参数值越精确,控制越准确灵敏。但是在实际运行过程中,绕组自感、电阻等参数会随着环境温度变化发生非线性变化,因此需要克服控制系统对参数的依赖性,提高矢量控制系统的鲁棒性。本文将对参数变化不敏感的变结构引入矢量控制系统,变结构是智能控制的组成之一,确定了滑模的运动方程和达到条件,设计了滑模速度控制器,对该控制器进行了仿真模拟。根据实验结果得知,控制系统当受到负载转矩的扰动后能快速恢复平衡;当转子电阻增大时,常规的矢量控制系统出现较大的波动,而具有滑模速度控制器的矢量控制系统仍然保持稳定状态;当外界条件或系统参数不发生变化时,两种控制系统功能相差不大。因此,滑模速度控制器的增加,提高了矢量控制系统对系统参数的变化的鲁棒性,增强了异步电机矢量控制系统的优异性。
3 结论
新型的自动化通风机监测和控制系统,以PLC为核心原件,将传感器采集的温度、压力和风量等参数实时传递至用户,实现远程监测;采用矢量控制技术对三相异步电机进行调速,解决直流电机效率低和消耗大的问题,用户可根据生产需要和环境条件调节风机风速;将滑模变控制理论引入矢量控制系统,提高了电机矢量控制系统的鲁棒性,克服了对参数变化敏感的缺点。仿真实验结果表明,优化后的监控方案具有显著的优异性。
