非制冷型640×512面阵红外导引头光学系统设计
2021-08-31孙爱平龚杨云浦恩昌李泽民雷旭峰
孙爱平,龚杨云,浦恩昌,李泽民,雷旭峰
非制冷型640×512面阵红外导引头光学系统设计
孙爱平,龚杨云,浦恩昌,李泽民,雷旭峰
(北方夜视科技研究院集团有限公司,云南 昆明 650223)
为了增大视场角、提高探测距离,本文设计了一款采用640×512面阵非制冷机芯的红外成像导引头。首先分析了红外成像导引头多种结构型式,结合本文设计要求的特点,选择了万向支架式的结构型式;其次对红外导引头光学系统进行像质优化,并对框架角及盲区的满足情况开展分析;最后以实物样机的试验情况,说明此红外成像导引头成像质量良好,能满足搜索、跟踪目标的要求。
导引头;红外;框架角;盲区
0 引言
现代导弹的制导模式多种多样,具有单模、双模和多模3种制导模式,每种制导模式主要使用雷达、毫米波、主动/半主动激光、电视、红外等制导技术,各种制导技术根据自身的技术特点具有特定的使用范围。红外制导技术具有精度高、隐蔽性好、抗干扰能力强、能昼夜作战,在精确制导武器中备受青睐[1]。红外导引头分为热点式导引头和红外成像导引头[2]。红外成像导引头是红外制导导弹的关键部件之一,而红外导引头光学系统是红外成像导引头的“眼睛”[3]。红外成像导引头技术从单像元、线阵发展到面阵成像,其空间分辨率和抗干扰能力得到不断提高[4-5]。
制冷型红外探测器由于具有较高的灵敏度和较短的热响应时间,在早期的红外成像导引头中得到广泛的应用。随着非制冷型红外探测器制造技术的快速发展,热响应时间和灵敏度性能的不断提升,非制冷型红外探测器在红外成像导引头中逐渐得到应用。非制冷型红外成像导引头由于摒弃了体积大、重量重且价格昂贵的制冷机,与制冷型红外成像导引头相比具有体积小、重量轻、价格低的优点,可大大地减小导引头的尺寸和重量,实现了导引头的小型化,并且已成为红外成像导引头的重要成员之一。经过多年的发展,非制冷型红外成像导引头已广泛用于反坦克导弹、精确攻击导弹、小直径炸弹、反舰导弹等[6]。
基于以上分析,本文设计了一款适用于152mm中口径弹径的非制冷型、红外导引头的光学系统,并以仿真及试验结果说明此款红外成像导引头的性能。
1 红外导引头系统组成
红外成像导引头主要由位标器及电子舱所组成,位标器主要包含红外成像组及伺服系统;电子舱主要包含伺服控制电路及图像处理电路。根据红外成像组与弹体耦合方式的不同,位标器可分为捷联式、万向支架式及陀螺式。捷联式位标器的红外成像组与弹体直接固定,不具备视场扫描能力;万向支架式位标器的红外成像组固定在万向支架上,可随万向支架转动形成扫描视场;陀螺式位标器的红外成像组全部或部分随陀螺转动形成扫描视场。捷联式红外成像导引头不具备视场扫描能力,只能跟踪固定大型目标或者运动速度较慢的目标,系统结构简单、制导精度低;万向支架式红外成像导引头具备视场扫描能力,可跟踪中速运动的目标,系统结构较复杂、制导精度较高;陀螺式红外成像导引头也具备视场扫描能力,可跟踪速度高的运动目标,系统结构更复杂、制导精度高。
成都鼎屹信息技术有限公司已经开发出采用384×288非制冷型长波红外机芯的万向支架式红外成像导引头,此款导引头在保证探测距离的条件下,瞬时视场比较小,需要辅助一定的框架角以提高搜索、跟踪的视场范围。红外成像导引头为了得到更远的探测距离、更大的瞬时视场,需要采用更长的光学焦距、更高分辨率的红外机芯,例如常用的640×512非制冷型长波红外机芯。
本文所设计的用于152mm中口径弹径红外导引头光学系统要求跟踪移动的中型坦克目标,其速度中等,可选用万向支架式的结构型式,此结构型式复杂度中等,精度也能满足要求,同时可降低制造的成本。
2 红外导引头光学系统设计
2.1 设计指标
为了提高红外成像导引头的搜索、跟踪距离及瞬时视场,本文采用640×512非制冷型长波红外机芯;为了提高红外成像导引头的搜索、跟踪能力,采取了万向支架式的结构型式。红外成像导引头着重于搜索、跟踪远距离的目标,此目标所成图像为一个具有一定尺寸、一定对比度的热点图像。通过增大红外导引头光学系统的有效口径(减小光学系统的F/#),可增加接收的目标辐射能量,增大目标成像对比度及探测概率。640×512面阵、非制冷型红外导引头光学系统设计参数如表1所示。
2.2 红外导引头光学系统性能优化分析
红外导引头光学系统由整流罩及红外成像组所组成。整流罩的面型大小及外形尺寸受红外制导导弹的气动特性及框架角的大小所决定。整流罩材料选用透过率高、工艺性比较好的热压ZnS材料。红外制导导弹在飞行过程中需要搜索、跟踪运动的目标,红外成像组在俯仰及偏航方向具有一定的转动角量。为了保证转动时光学成像特性不变,则整流罩需要做成同心、等厚的球冠,并且使红外成像组的转动中心与整流罩的球心相重合。本文所设计的整流罩内、外半径分别为72mm、76mm,厚度为4mm,外径为126mm。
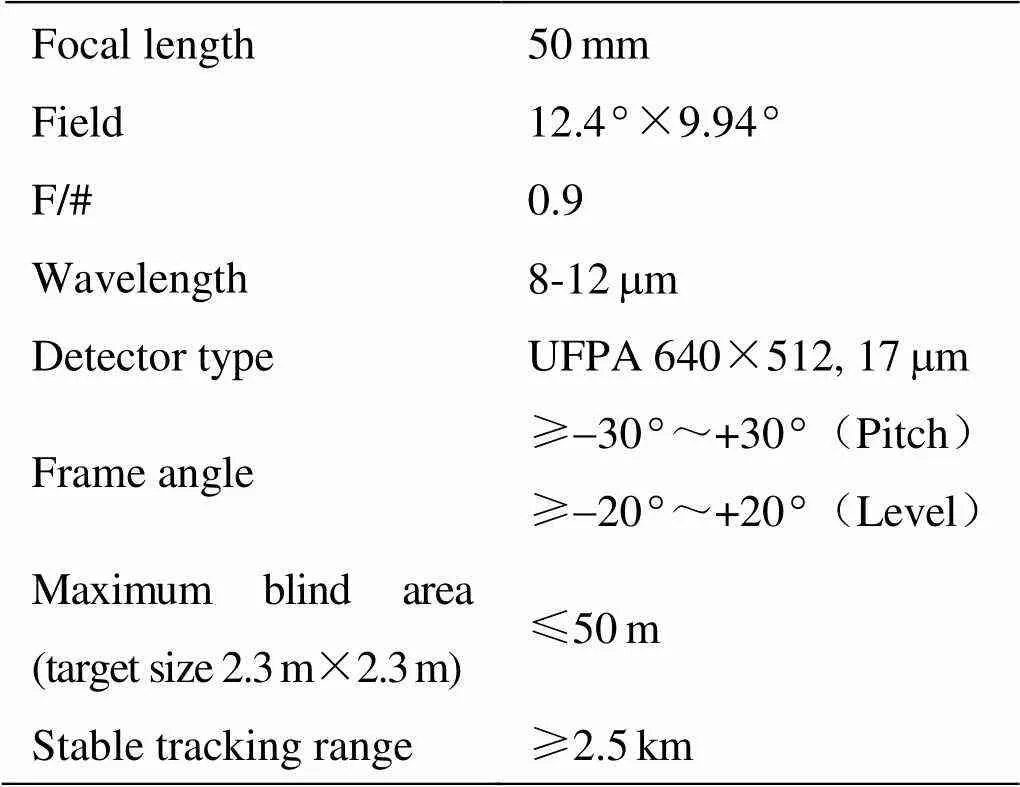
表1 红外导引头光学系统设计参数
红外制导导弹在发射前随季节及地理位置的变化环境温度变化较大,发射后飞行段弹体的温度也会发生比较大的变化,工作温度的变化使红外导引头光学系统的焦面发生一定量的位移并且不易人为调节补偿,造成成像模糊、不利于搜索、跟踪,因此红外导引头光学系统需要进行光学被动式消热差设计。
光学被动式消热差光学设计的基本原理在孙爱平[7]等相关论文中已有详细论述。红外成像组采取三片式设计型式,配合整流罩进行像差优化。在设计过程中加入衍射面,衍射光学元件其特殊的光学特性可单独作为一种特殊的光学材料参与像差优化。红外导引头光学系统选用线膨胀系数较小的Ge材料(=5.8×10-6/K)、线膨胀系数较大的IG6材料(=21.2×10-6/K)、整流罩热压ZnS材料(=6.6×10-6/K)及衍射元件配合镜筒Al材料(=23.6×10-6/K)进行光学被动式消热差设计。根据光学被动式消热差的基本原理,需要3种以上的红外材料进行消热差设计,本文采用3种光学材料及一种特殊的光学材料——衍射光学元件,足以满足光学被动式消热差设计的要求。红外导引头光学系统为大孔径光学系统(F/#=0.9),相应的孔径像差比较难校正,它需要校正轴向球差、垂轴球差、轴向色差、垂轴色差、慧差、场曲、畸变7种像差及对应的高级像差。由于红外材料比较昂贵,在设计时需要遵循使用最少透镜的原则。本文4个透镜所提供的变量不足以校正7种像差及对应的高级像差,因此在设计时加入非球面以增加变量个数,实现比较好的像差校正效果。
红外导引头光学系统的衍射元件为基诺衍射光学元件,此衍射面理论上可放置在除球罩外的任何表面上,经过光学的优化设计结果比对,衍射面放置在第一透镜的第二表面上,像质效果最优。
红外导引头光学系统衍射面的基底面型为偶次非球面,对应衍射效率计算公式如下:
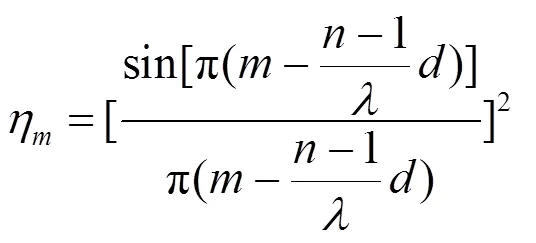
红外导引头光学系统衍射面衍射级次为第一级(=1),中心波长为9.6mm,基底材料为IRG206(对应9.6mm波长的折射率为2.77908),对应刻蚀深度计算如下:

则中心波长处的衍射效率为100%。
基诺衍射面可由金刚石车床车削加工,基底可为平面、球面及非球面,其最小尺寸受刀具半径的限制。此衍射面的最小环带半径D间隔为1.055953mm,能满足加工厂家最小刀具的要求。基诺衍射面加工的理想面型如图1所示。衍射面可使用轮廓仪进行检测,由峰-谷值和均方根值来判断衍射面的加工质量。基诺衍射面检验结果如图2所示。
红外导引头光学系统的光学布局型式如图3所示。使用ZEMAX软件进行像质优化,在常温(20℃)、低温(-40℃)、高温(60℃)特定工作条件下,中心频率点30lp/mm处的MTF曲线对比度大部分在0.5以上;通过判读点列图及能量包围曲线,约有85%的能量集中在一个像素内;通过场曲及畸变曲线可知畸变值均小于0.4%。通过以上分析,红外导引头光学系统消热差效果好,能够满足设计要求。图4、图5、图6分别为常温(20℃)、低温(-40℃)、高温(60℃)条件下的MTF曲线、点列图、能量包围曲线、场曲与畸变曲线。
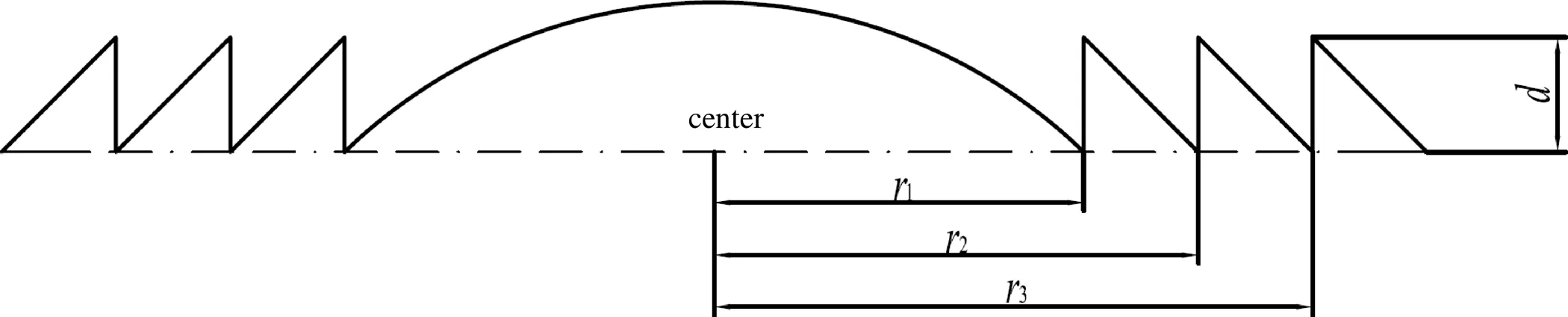
图1 基诺衍射面理想面型
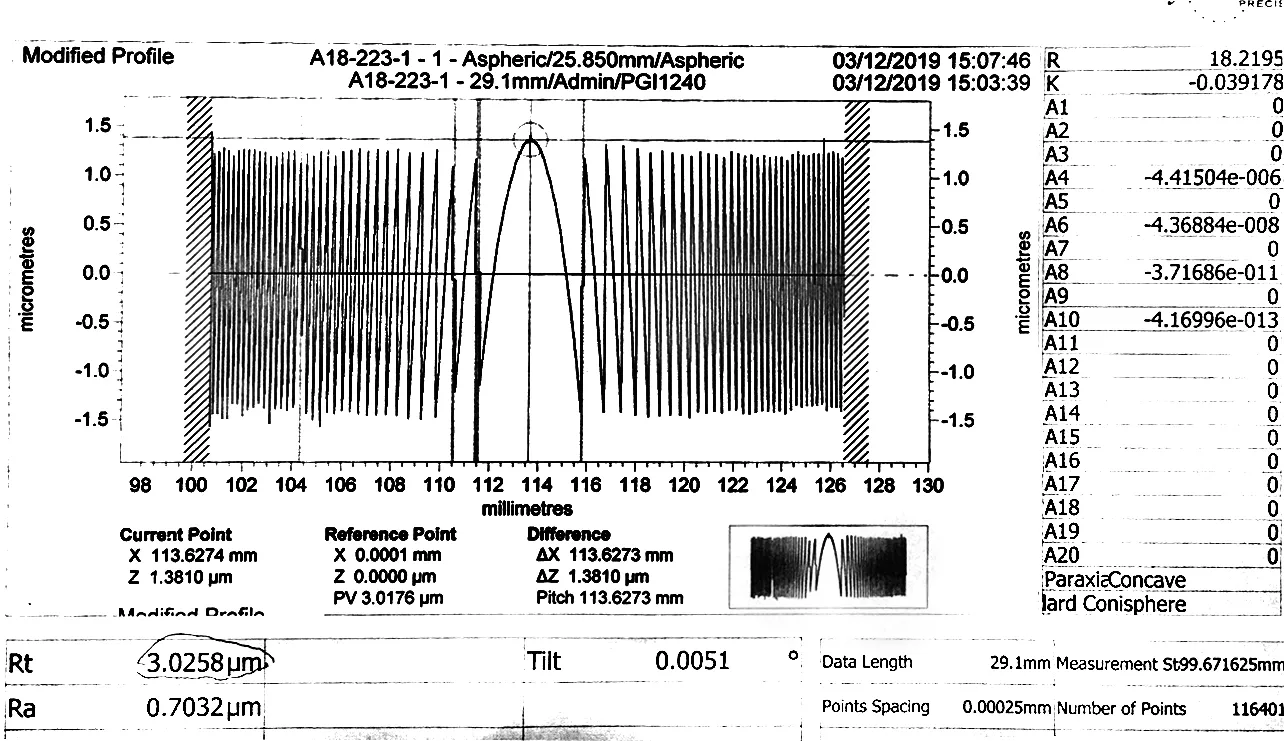
图2 基诺衍射面检测结果
图3 红外导引头光学系统布局型式图
图4 在20℃工作条件下红外导引头光学系统的MTF曲线、点列图、能量包围曲线、场曲与畸变曲线
图5 在-40℃工作条件下红外导引头光学系统的MTF曲线、点列图、能量包围曲线、场曲与畸变曲线
图6 在60℃工作条件下红外导引头光学系统的MTF曲线、点列图、能量包围曲线、场曲与畸变曲线
红外导引头光学系统的焦深为±2(F/#)=±2×9.6mm×0.92≈±17.7mm,所设计的光学系统工作在-40℃~60℃范围内时,离焦量在一个焦深以内,如表2所示,则此光学被动消热差系统在整个工作温度内均能清晰成像。
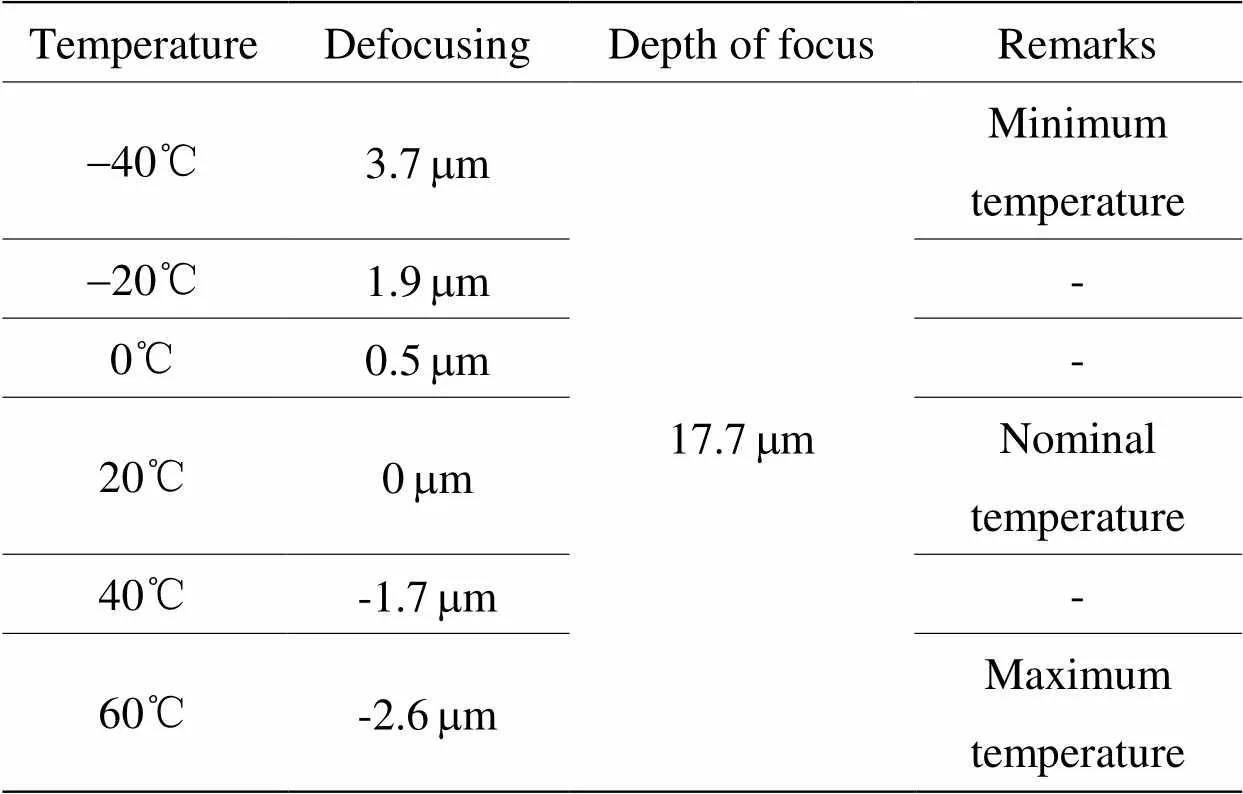
表2 红外导引头光学系统离焦量表
2.3 框架角分析
随着红外制导导弹及目标的运动轨迹、运动速度的不同,在导弹飞行过程中出现目标移出瞬时视场的现象,造成目标丢失,此时需要红外导引头光学系统随目标移动方向转动形成一定的扫描视场,使目标始终处于红外导引头的瞬时视场内。红外导引头光学系统转动的角量对应着框架角值。
红外导引头光学系统转动角量为0°时,此时上边缘光线与球罩的交点到光轴的距离为1,对应圆心角为;当转动角度为时,上边缘光线与球罩最外边缘相重合,并且与光轴距离为2,此时对应圆心角为;为球罩外圆半径,如图7所示。则框架角计算如下:

本文所设计红外导引头光学系统对应的1=29.5mm、2=63mm、=76mm,代入上式可得=33.1°,如图8所示。由于红外导引头光学系统为球对称系统,故其框架角能够满足俯仰±30°、偏航±20°的要求。
图7 框架角计算示意图
Fig.7 Schematic diagram of frame angle calculation
2.4 盲区分析
红外制导导弹是依据目标所成图像的轮廓特征实现搜索、跟踪。当目标充满成像机芯任意一个方向时,形成跟踪盲区,后续阶段依据导弹的惯性制导攻击目标。盲区距离越小,惯性制导段越短,攻击成功率就越高。
成像机芯分辨率为640×512,像元间距为17mm,对应的靶面尺寸为10.88mm×8.704mm,2.3m×2.3m的中型坦克目标充满水平、竖直向的条件下对应的盲区距离计算如下:
水平向盲区距离计算:
竖直向盲区距离计算:
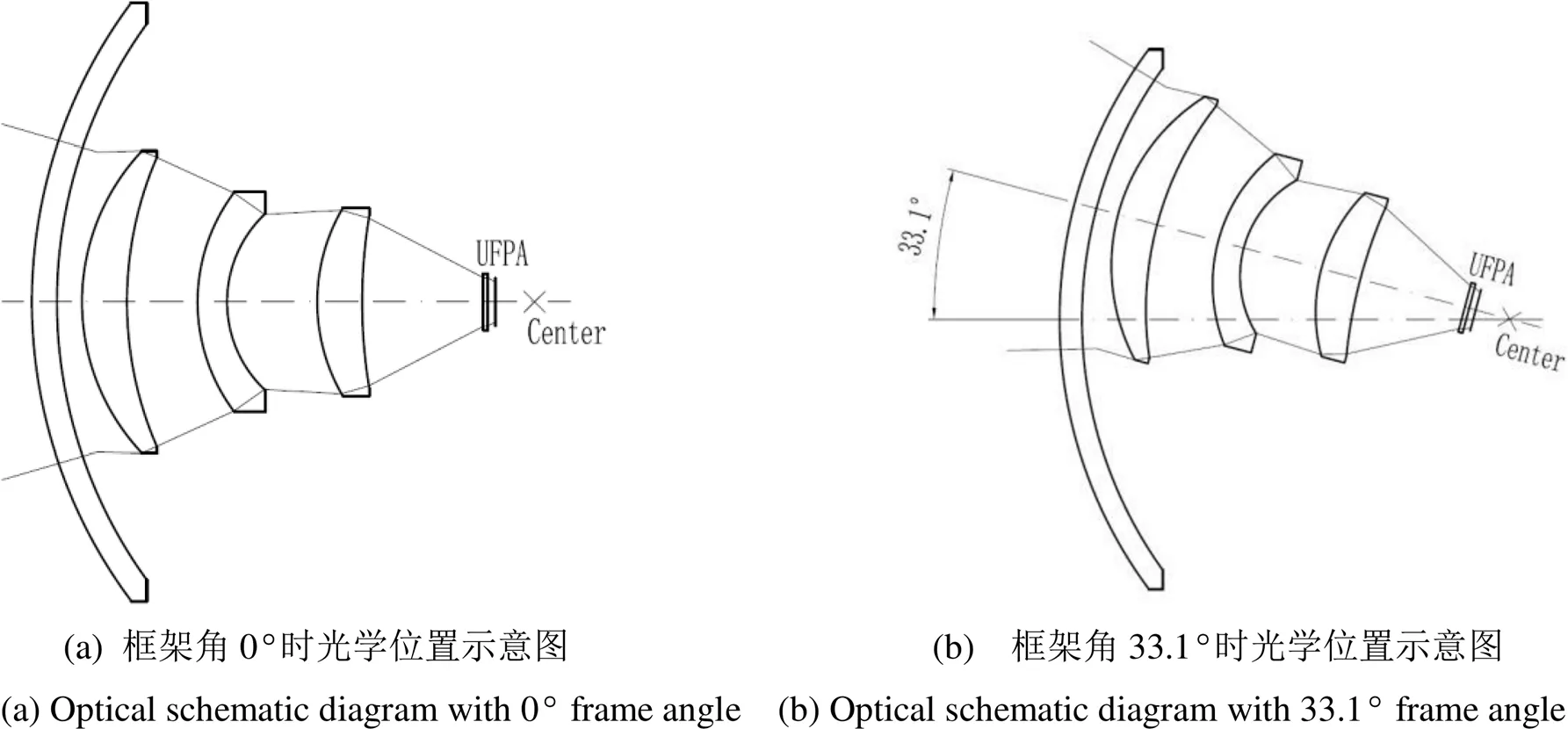
图8 导引头框架角在0°、33.1°工作时光学位置示意图
Fig.8 Optical schematic diagram when seeker frame angle is 0°and 33.1°
综上所述,2.3m×2.3m的中型坦克目标充满成像机芯的短边时,盲区距离最远(13.2m),此距离值小于50m的要求。
2.5 公差分析
红外导引头光学系统按表3分配零件公差,焦面位移作为补偿,以平均概率分布方式分配实际装配及加工时的公差值,并采用蒙特卡罗分析方法模拟加工装配后的虚拟镜头的MTF变化,依此判断实际镜头的成像效果。表4的蒙特卡罗分析结果表明90%的镜头在奈奎斯特频率处具有不小于0.239的MTF值,焦面补偿在±0.5mm以内。此镜头加工及装配工艺比较成熟,且整个镜头的成像质量较好,即公差分配合理。
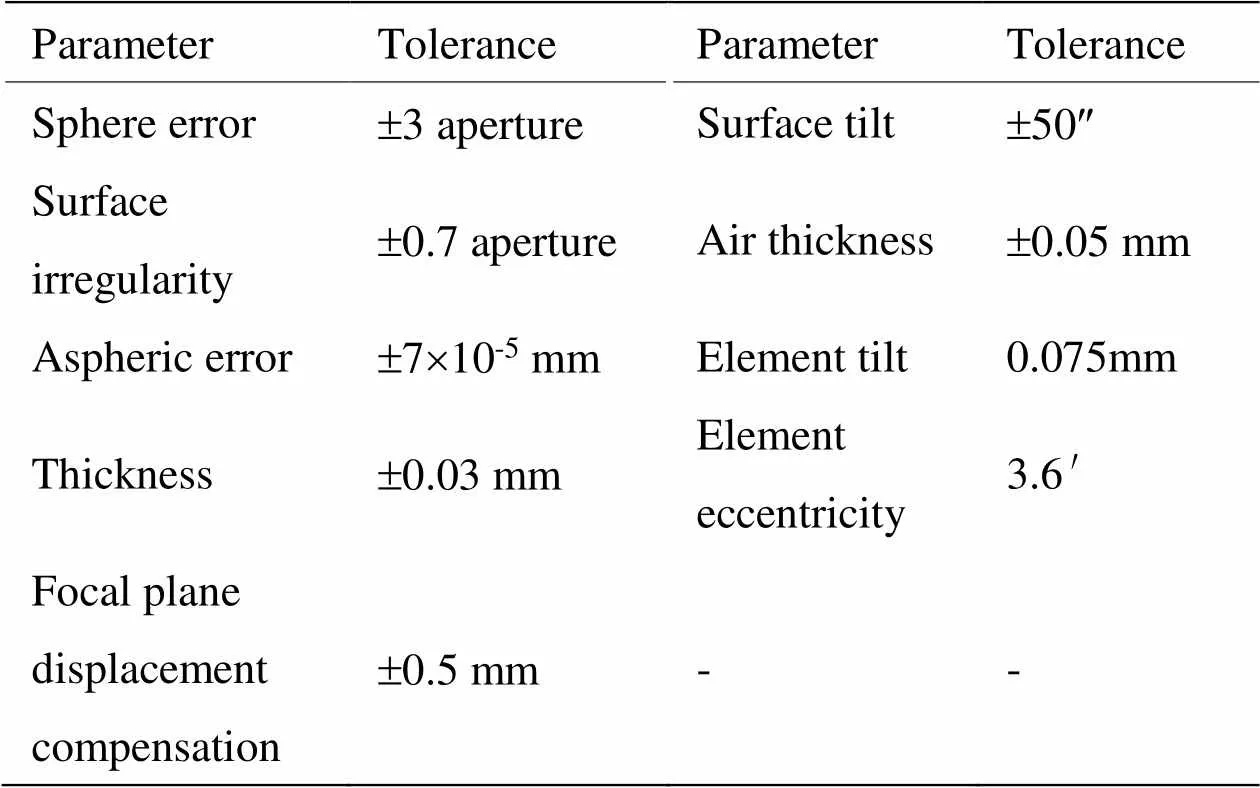
表3 零件公差表
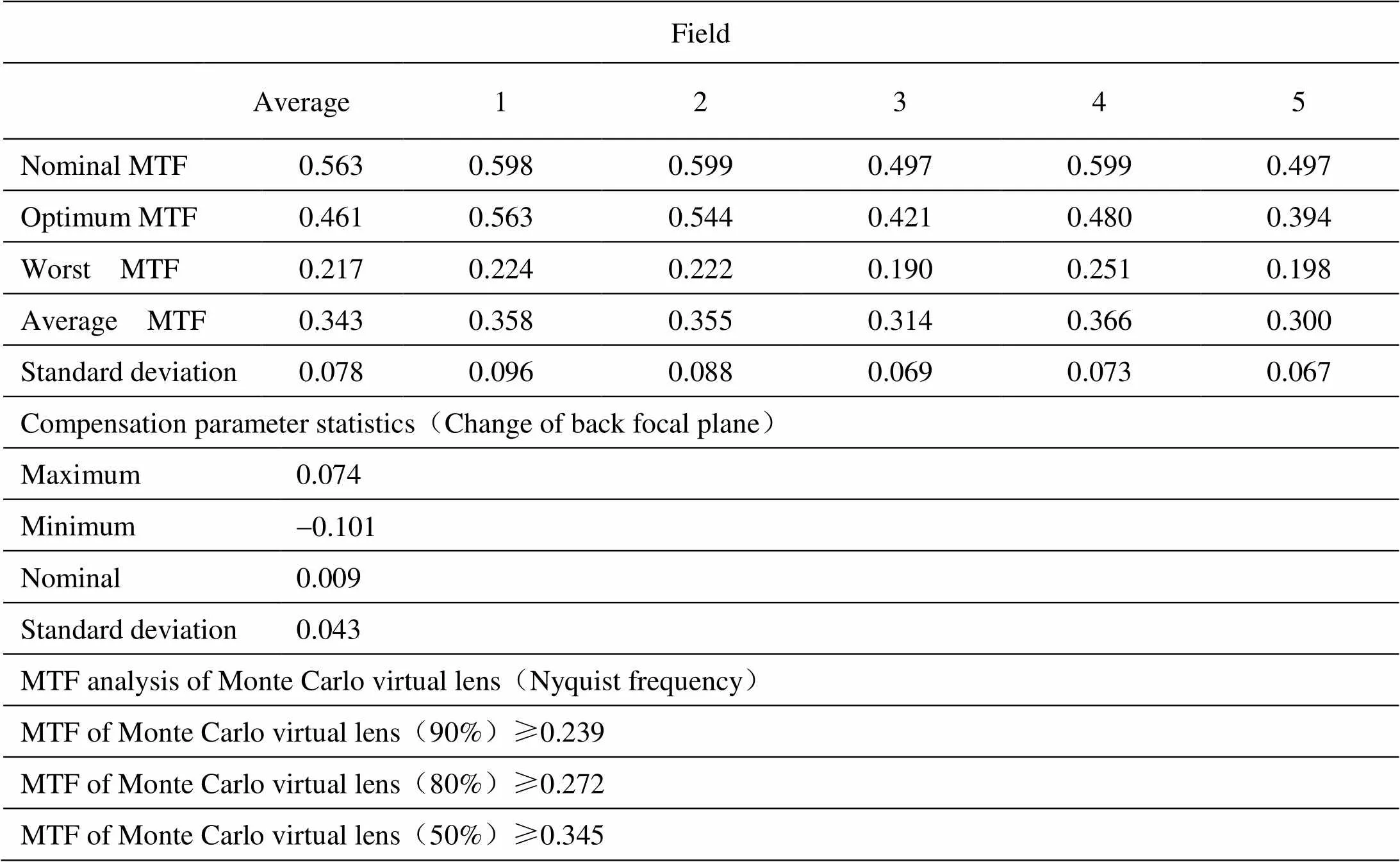
表4 蒙特卡罗虚拟镜头分析结果
3 红外成像导引头实际效果
图9是调试时截取观察到的高架桥上的私家车辆的图片,可清晰分辨出小尺寸的私家车辆目标;图10是红外成像导引头外场打靶试验视频截图。通过以上试验可得出此红外成像导引头成像质量好,跟踪捕捉精度高,能够满足使用要求。
4 结论
本文设计了一款适用于152mm弹径的非制冷型、红外导引头成像系统。详细介绍了红外导引头各种设计方案的优劣,提出使用万向支架式的设计方案。根据此方案对红外导引头光学系统进行像质优化及分析,得到比较好的成像效果,并对框架角及盲区开展分析计算。通过红外成像导引头调试试验截图、外场调试试验截图及挂飞试验截图的分析,得出成像质量良好,能够实现搜索、跟踪目标的功能。此红外导引头光学系统的设计,可以后类似系统的开发提供参考。

图9 红外成像导引头调试时截图
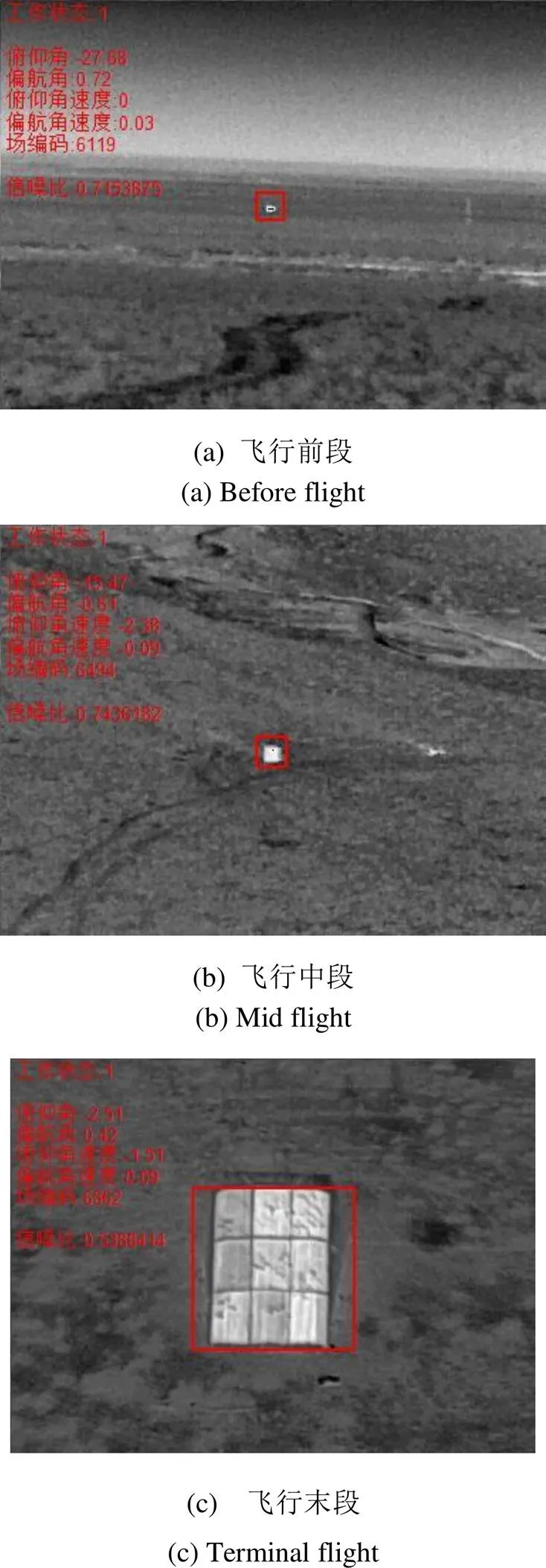
图10 打靶试验截图
[1] 李煜, 白丕绩, 陶禹, 等. 应用于红外成像导引头的非制冷焦平面探测器[J]. 红外技术, 2016, 38(4): 280-289.
LI Yu, BAI Piji, TAO Yu, et al. Uncooled focal plane arrays detector applied for infrared imaging seeker[J]., 2016, 38(4): 280-289.
[2] 汤永涛, 林鸿生, 陈春. 现代导弹导引头发展综述[J]. 制导与引信, 2014, 35(1): 12-17.
TANG Yongtao, LIN Hongsheng, CHEN Chun. The development and summary of modern missile seeker[J]., 2014, 35(1): 12-17.
[3] 姜成舟, 段萌, 潘国庆, 等. 一种小型化探测器固联于弹体式导引头光学系统设计[J]. 红外技术, 2014, 36(9): 743-747.
JIANG Chengzhou, DUAN Meng, PAN Guoqing, et al. A miniaturized optical system design of seeker with detector fixation[J]., 2014, 36(9): 743-747.
[4] 赵善彪, 张天孝, 李晓钟. 红外导引头综述[J].飞航导弹, 2006(8): 42-45.
ZHAO Shanbiao, ZHANG Tianxiao, LI Xiaozhong. A summary of infrared seeker[J]., 2006(8):42-45.
[5] 刘珂, 陈宝国, 李丽娟. 空空导弹红外导引头技术发展趋势及关键技术[J]. 激光与红外, 2011, 41(10): 1117-1121.
LIU Ke, CHEN Baoguo, LI Lijuan. Development tendency and key technology of IR seeker for air-to-air missile[J]., 2011, 41(10): 1117-1121.
[6] Fraenkel R, Haski J, Mizrahi U, et al. Cooled and uncooled infrared detectors for missile seekers[C]//, 2014, 9070: 90700P.
[7] 孙爱平, 龚杨云, 朱尤攀, 等. 大孔径、大视场辅助驾驶仪红外镜头无热化设计[J]. 红外技术, 2013, 35(10): 617-622.
SUN Aiping, GONG Yangyun, ZHU Youpan, et al. Optical system design of low-light-level and infrared image fusion hand-held viewer[J]., 2013, 35(11): 712-717.
Optical System Design of Uncooled 640×512 Infrared Seeker
SUN Aiping,GONG Yangyun,PU Enchang,LI Zemin,LEI Xufeng
(,650223,)
In order to increase the angle of field and the detection distance, we designed an infrared imaging seeker using an 640×512 uncooled FPA. Firstly, we analyzed various structural types of infrared imaging seeker. Based on the characteristics of the design requirements, the universal support type structural type is selected. Secondly, we optimized the image quality of the infrared seeker optical system and analyzed the satisfaction of the frame angle and blind area. Finally, the test results of the real prototype show that the infrared imaging seeker has good imaging quality and can meet the requirements of searching and tracking targets.
seeker, infrared, frame angle, blind area
TN219
A
1001-8891(2021)08-0736-07
2019-12-11;
2021-01-19.
孙爱平(1980-),男,硕士,高级工程师,研究方向:光学系统设计。E-mail:50973525@qq.com。
