北斗三号系统中轨道地球卫星伪距多路径误差分析和改正
2021-08-24刘九龙曹月玲胡小工
刘九龙,曹月玲,胡小工
(1. 中国科学院上海天文台 天文地球动力学中心, 上海 200030;2. 中国科学院大学, 北京 100049; 3. 上海市空间导航与定位技术重点实验室, 上海 200030)
随着北斗三号系统(BeiDou Navigation Satellite System Phase Ⅲ,BDS-3)逐步完成全球组网并提供导航定位服务,伪距多路径已成为影响定位的主要误差来源。当直射导航信号到达接收器天线时,反射和折射的信号也同时到达接收器天线并污染了直射信号。这种现象被称为多径效应,而这些间接信号引起的测量误差就是多径误差。针对固定站或静止站接收机常用改正多路径误差的方法除了在测站选址上减少接收机天线周围的反射物体外,还可以从基于硬件和基于软件算法两方面考虑。基于硬件技术改善接收机天线增益模式可以消除部分多路径误差的影响。基于软件算法的方法包括对多路径误差进行建模[1];使用信噪比(Signal-to-Noise Ratio,SNR)对全球导航卫星系统(Global Navigation Satellite System, GNSS)测量数据进行加权处理[2]以及利用各种滤波技术在频域、空域或时域改正多路径误差[3],如卡尔曼滤波[4]、小波分析[5]、恒星日滤波(Sidereal Filter, SF)[6];奇异谱分析的北斗恒星日滤波算法[7];利用北斗卫星三频信号组合[8];利用多线性拟合和多项式拟合方法[9]等。
多路径半天球图(Multipath Hemispherical Map,MHM)模型方法就是利用导航卫星在空域的重复性建立多路径模型,从而对多路径误差进行改正。如利用MHM模型对GPS短基线伪距和相位测量中的多路径误差进行改正[10],利用MHM模型对BDS伪距和相位双差测量中的多路径误差进行改正[11]。本文利用双频单点伪距和载波相位观测数据,建立伪距MHM模型,从而对伪距多路径误差进行改正。
伪距噪声和多路径校正(Code Noise and Multipath Correction,CNMC)法是利用载波相位平滑伪距的方法,对伪距多路径误差进行改正。针对BDS-2的地球静止轨道(Geostationary Earth Orbit, GEO)和倾斜地球同步轨道(Inclined Geosynchronous Orbit, IGSO)卫星,取得了很好的改正效果[12-13]。BDS-3卫星在播发新体制信号B1C和B2a的基础上,同时继续播发平稳过渡信号B1I和B3I信号。本文利用CNMC算法针对BDS-3地球中轨道(Medium Earth Orbit, MEO)卫星B1C和B1I信号的伪距多路径误差进行改正,利用新体制信号比对多路径误差改正前后伪距的定位精度。
1 伪距测量的多路径误差
根据基本导航原理,如式(1)所示,伪距测量值包含卫星轨道信息、卫星钟差、接收机坐标、接收机钟差、电离层延迟、中性大气延迟、多路径误差和随机噪声。除了整周模糊度,载波相位测量和伪距测量包含相同的卫星轨道信息、卫星钟差、接收机坐标、接收机钟差和中性大气延迟。如果忽略高阶电离层延迟,对于相同的观测频率,伪距的电离层延迟与载波相位的电离层延迟大小相等、方向相反。相比于伪距的多路径误差,载波相位测量的多路径误差可以忽略不计[12]。
GNSS多频伪距/相位观测方程如下:
Pi=|Rsat-Rrcv|+Δtrcvlk-Δtsatclk+Δttrop+Δtiono,i+
Δtcor+τsat+τrcv+MPi+εPi
(1)
Li=|Rsat-Rrcv|+Δtrcvlk-Δtsatclk+Δttrop-
Δtiono,i+Δtcor+τsat+τrcv+MLi+λi·Ni+εLi
(2)
其中:Pi为i频点伪距观测量;Li为i频点相位观测量;Rsat是卫星位置坐标;Rrcv是接收机位置坐标;Δtcor是观测误差改正,包括卫星和接收机的天线相位中心改正、测站潮汐改正;Δtrcvlk是接收机钟差;Δtsatclk是卫星钟差;Δttrop是中性大气时延;Δtiono,i是i频点电离层时延;τsat和τrcv是卫星和接收机的硬件时延;Ni是整周模糊度;MPi和εPi分别是伪距测量多路径误差和随机误差;MLi和εLi分别是载波相位测量多路径误差和随机误差。两者做差可得:
Pi-Li=2Δtiono,i+MPi-λi·Ni
(3)
其中,随机误差包含在伪距多路径误差MPi中。对于双频BDS-3信号,i对应B1C和B2a两个频点信号。利用电离层延迟与信号频率平方成反比的特点可以得到包含伪距残差的伪距多路径表达式:
(4)
其中,f1和f2分别对应B1C和B2a的频率。式(4)忽略了载波相位观测的多路径误差,因为载波相位多路径误差远小于伪距多路径误差。可以通过对式(4)取一段时间窗的平均值作为整周模糊度扣除,同时由于随机误差符合正态分布,可以假定其均值为0,即可得到对应频点的伪距多路径值。
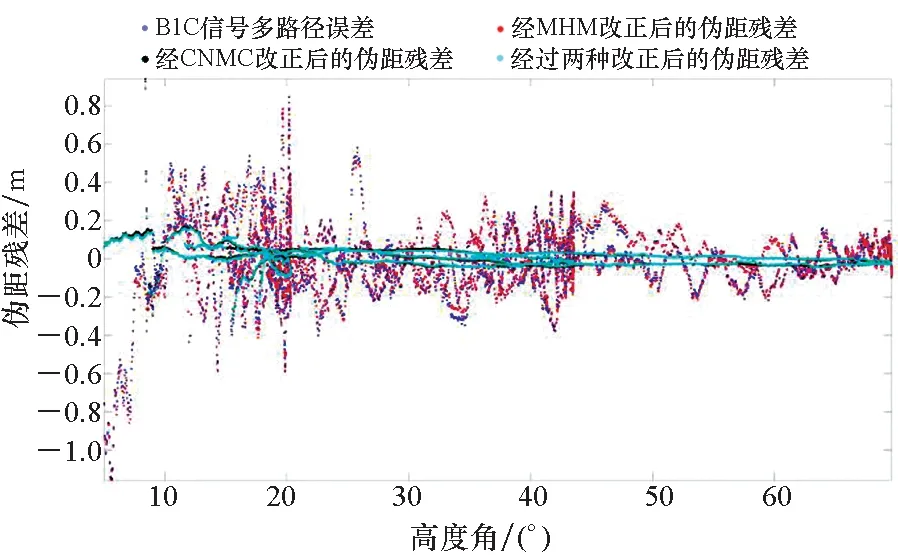
利用北京监测站2019年5月21日至24日的双频伪距/相位观测数据,计算伪距残差,如图1所示。
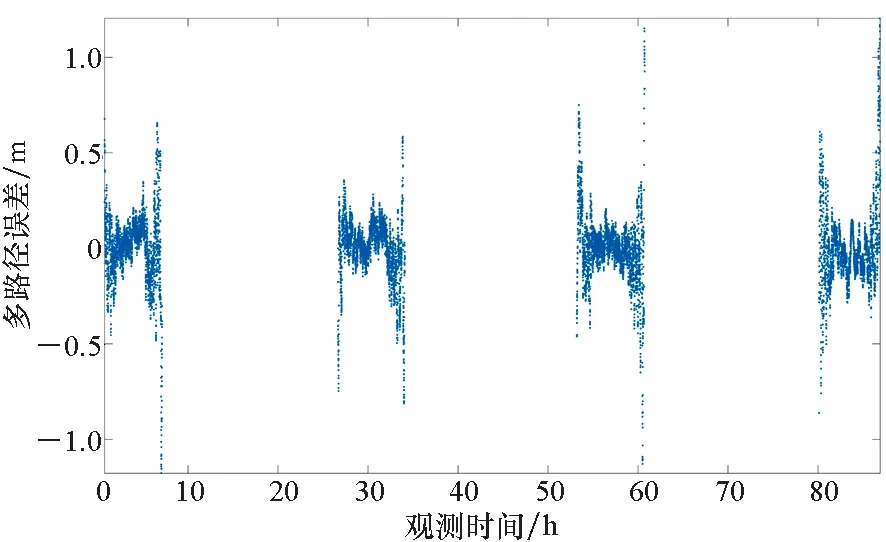
(a) 30号卫星B1C频点伪距多路径误差随时间变化图(a) Figure of pseudorange multipath error varies with time at B1C frequency of SATSCID 30
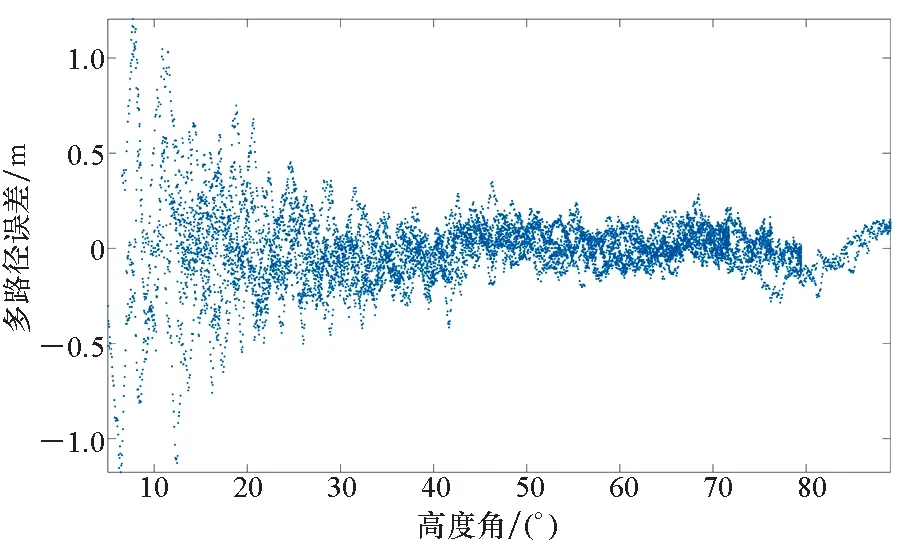
(b) 30号卫星B1C频点伪距多路径误差随高度角变化图(b) Figure of pseudorange multipath error varies with altitude at B1C frequency of SATSCID 30
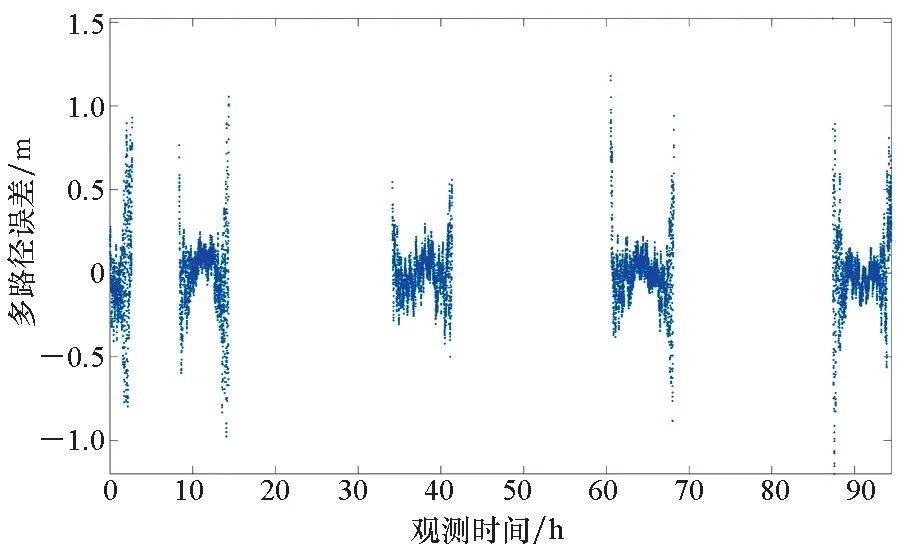
(c) 39号卫星B1C频点伪距多路径误差随时间变化图(c) Figure of pseudorange multipath error varies with time at B1C frequency of SATSCID 39
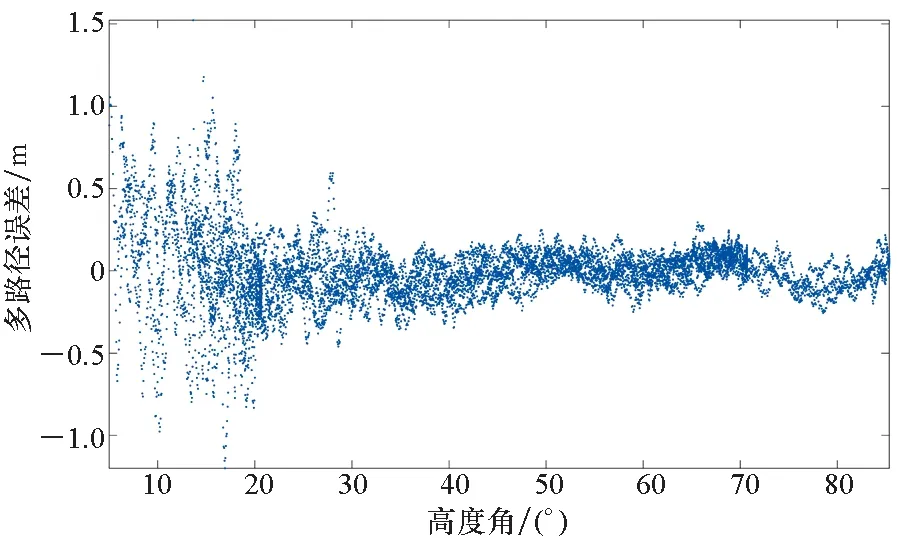
(d) 39号卫星B1C频点伪距多路径误差随高度角变化图(d) Figure of pseudorange multipath error varies with altitude at B1C frequency of SATSCID 39图1 30号和39号卫星B1C频点伪距多路径结果Fig.1 Results of pseudorange multipath error at B1C frequency of SATSCID 30 and 39
图1为30号和39号卫星B1C频点伪距多路径结果,从图1可以看出,BDS-3 MEO卫星伴随出入境(即低高度角时),伪距多路径误差会有大幅增加。当高度角小于15°时,伪距多路径影响可以达到米级,随着高度角的增加而多路径影响逐步缩小;当高度角大于30°时,伪距多路径误差的影响会小于0.5 m。由此可见,在伪距测量中,多路径误差的影响十分显著,这体现了伪距多路径误差改正算法的重要性。
2 MHM算法和CNMC算法
2.1 MHM算法
如果卫星是来自相同的GNSS类别(GPS、Galileo或BDS,但是GLONASS除外,因为每一颗GLONASS都有不同的频率),并且卫星的星上伪距多路径可以忽略,那么多路径误差的影响只和测站周围环境有关。如果测站环境保持不变,那么卫星信号从相同的天空半球面传来,无论信号来自哪一颗卫星,对接收机的多路径误差都应该是相同的。这种多路径误差的空间重复性是建立MHM模型的基础。MHM方法通过累积几天的伪距残差来估计以高度角和方位角为坐标的格网点平均值。然后对实时数据进行处理,扣除所在格网的伪距多路径估值。MHM模型是和观测频率相关的,对于不同的观测频率,应建立不同的MHM模型。
下面验证多路径误差的空间重复性。多路径误差的时间重复性是从空间重复性推导出来的。MHM网格是基于卫星在空间位置的残差构建的。所有的网格在地心坐标系中被定义为高度角和方位角。本文分别使用2019年5月21日至23日和2019年5月24日至26日北京监测站B1C频点的伪距残差构建了两个1°×1°的MHM网格模型(如图2所示)。
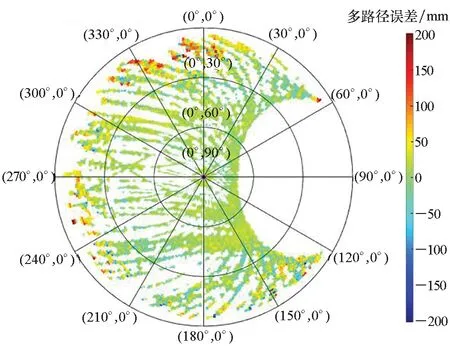
(a) 2019年5月21日至23日B1C伪距多路径误差MHM图(a) MHM graph of B1C pseudorange multipath error on May 21 to 23, 2019

(b) 2019年5月24日至26日B1C伪距多路径误差MHM图(b) MHM graph of B1C pseudorange multipath error on May 24 to 26, 2019图2 MHM图Fig.2 MHM graph
图2中测量方位角从以北向为起点顺时针旋转360°,高度角以地平为起点指向天顶,中心表示高度角为90°,最大圆表示高度角为0°。从图2可以看出,MHM图有非常相似的空间分布。较大的多路径误差分布在5°~25°高度角的环区间。
2.2 CNMC算法
根据伪距和载波相位观测方程式(1)~(2),可以容易地验证,同历元伪距和载波相位观测量之差(Code Minus Carrier, CMC)包括双倍电离层延迟改正、模糊度和通道时延组合值、伪距多路径误差和噪声信息。根据双频载波相位观测量可计算当前历元(带模糊度的)电离层延迟改正,如果能估计出模糊度和通道时延组合值,就可以分离出伪距多路径和噪声。CNMC方法通过递推估计模糊度和通道时延组合值。具体方法如下:
由式(3)可得:
CMC=2Δtiono,i+MPi-λi·Ni
(5)
利用B1C和B2a双频相位观测数据可以计算B1C和B2a频点电离层延迟改正:
(6)
(7)
式中,b包含了载波相位的频率间偏差和双频整周模糊度之差,在后续的估计中假定为常数。伪距和载波相位观测量之差扣除双倍电离层延迟改正后,根据递推公式估计模糊度和通道时延的组合值,即伪距和载波相位之差(Code Minus Carrier Bias, CMCB)。伪距多路径误差(包含随机误差)如下。
MPi=Pi(t1)-Li(t1)-2Δtiono,i-ΔCMCBi
(8)
实时伪距和多路径改正算法如下。
这里假定伪距多路径误差和随机误差初始值为0,则初始化
(9)
后续递归为:
(10)
式中,T为递推时间间隔,n为递推个数,δtiono,i(t)表示t时刻双倍电离层延迟。利用该递归公式就可以得到伪距多路径改正。
3 结果统计和分析
利用2019年5月21日至24日数据建立MHM模型,改正5月25日至26日的伪距多路径误差。同时与利用CNMC算法改正的伪距残差值进行比对,结果如图3所示。
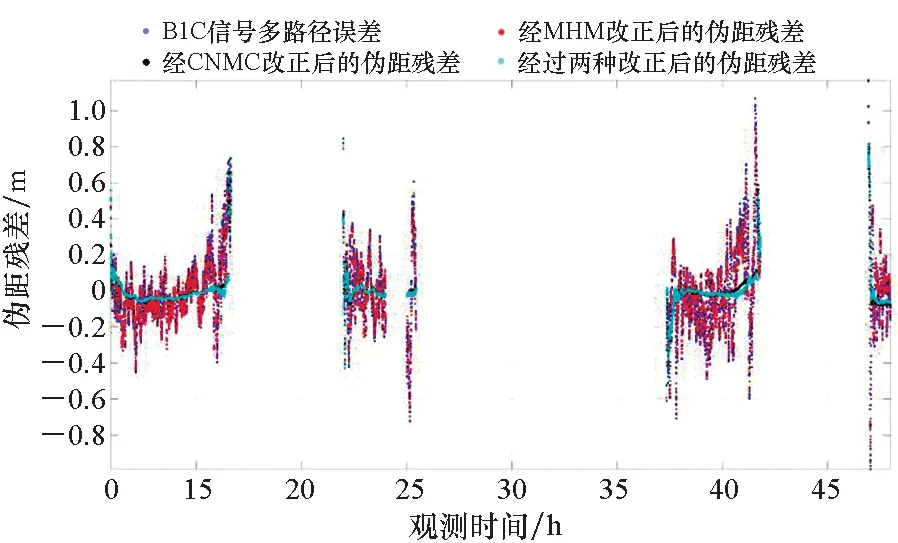
(a) 30号卫星B1C频点伪距残差随时间变化图(a) Figure of pseudorange residuals varies with time at B1C frequency of SATSCID 30
(b) 30号卫星B1C频点伪距残差随高度角变化图(b) Figure of pseudorange residuals varies with altitude at B1C frequency of SATSCID 30
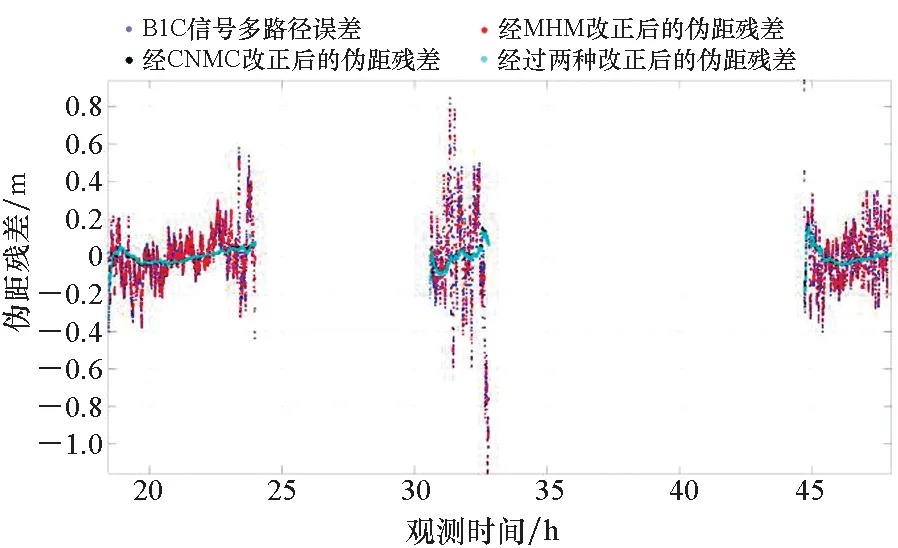
(c) 39号卫星B1C频点伪距残差随时间变化图(c) Figure of pseudorange residuals varies with time at B1C frequency of SATSCID 39
(d) 39号卫星B1C频点伪距残差随高度角变化图(d) Figure of pseudorange residuals varies with altitude at B1C frequency of SATSCID 39图3 30和39号卫星B1C频点伪距多路径结果Fig.3 Results of pseudorange multipath error at B1C frequency of SATSCID 30 and 39
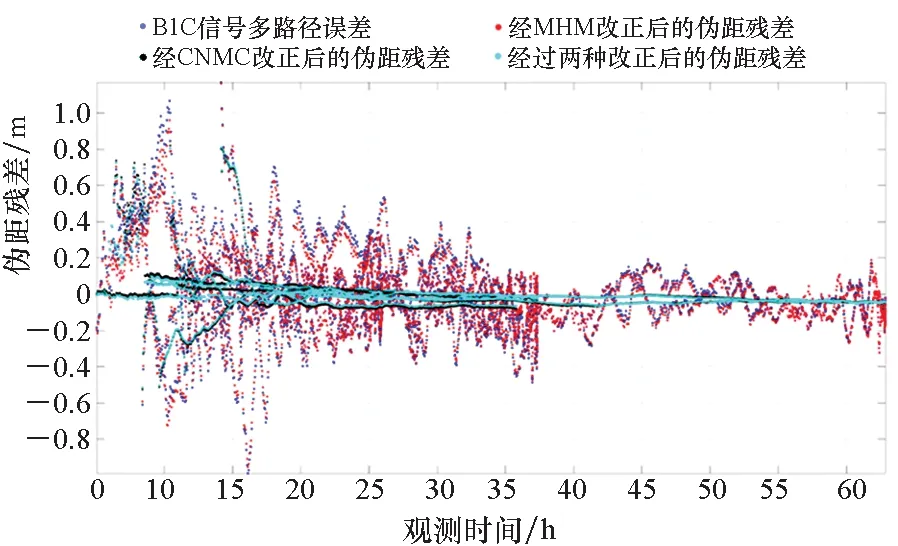
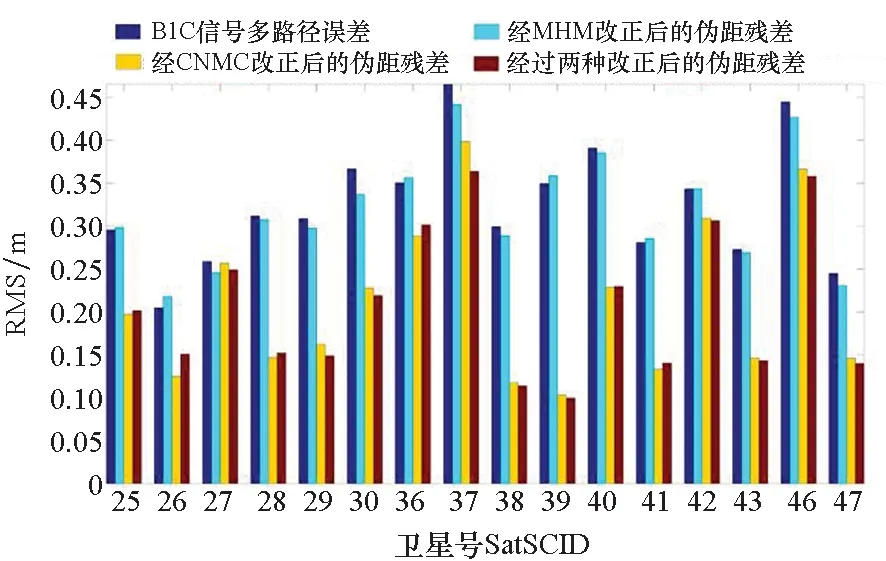
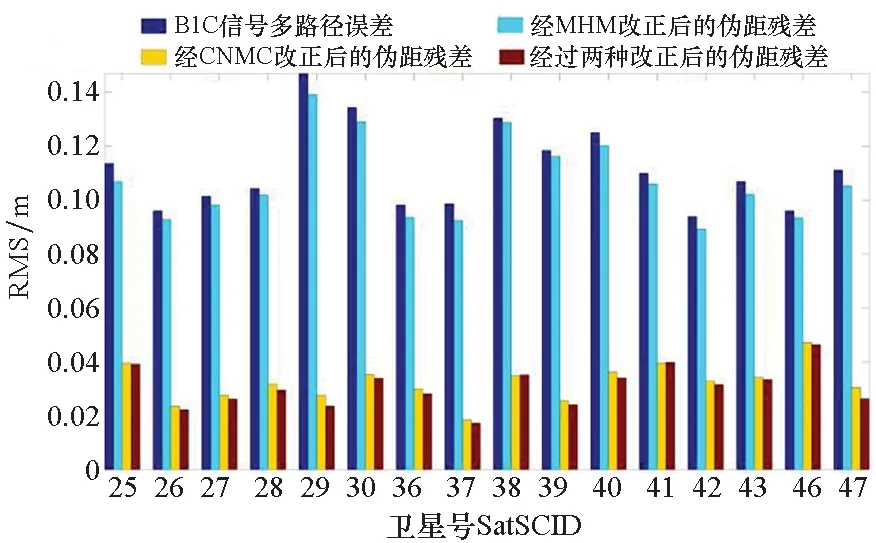
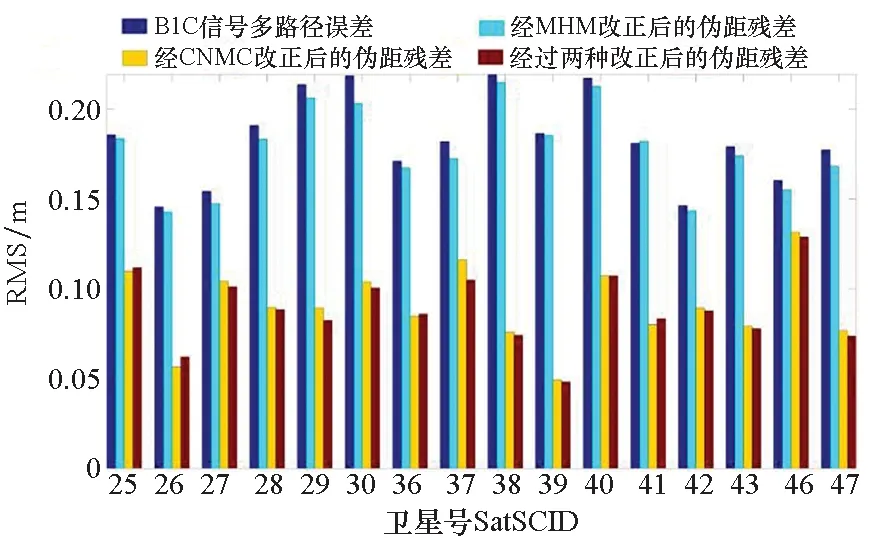
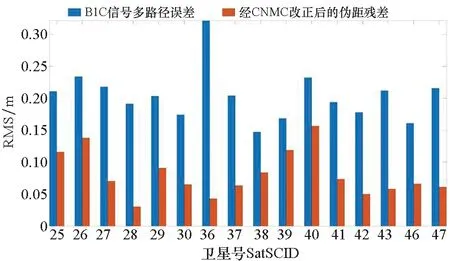
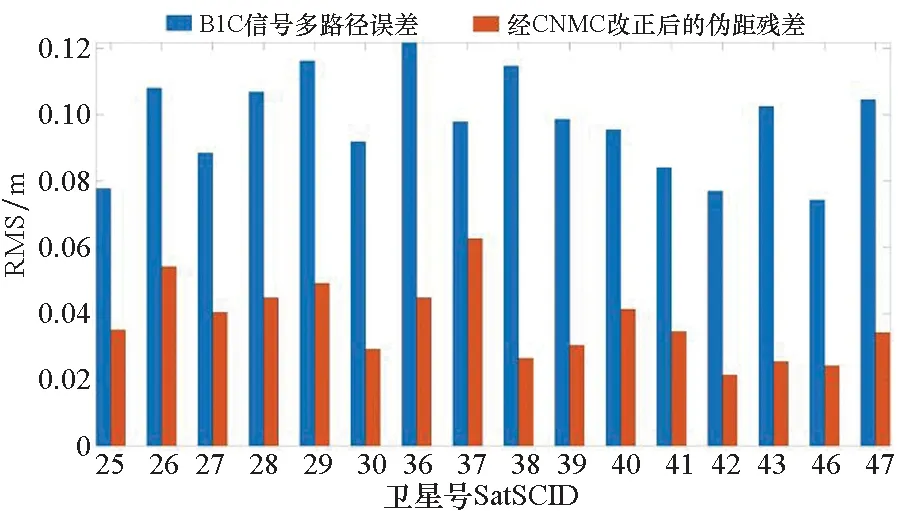
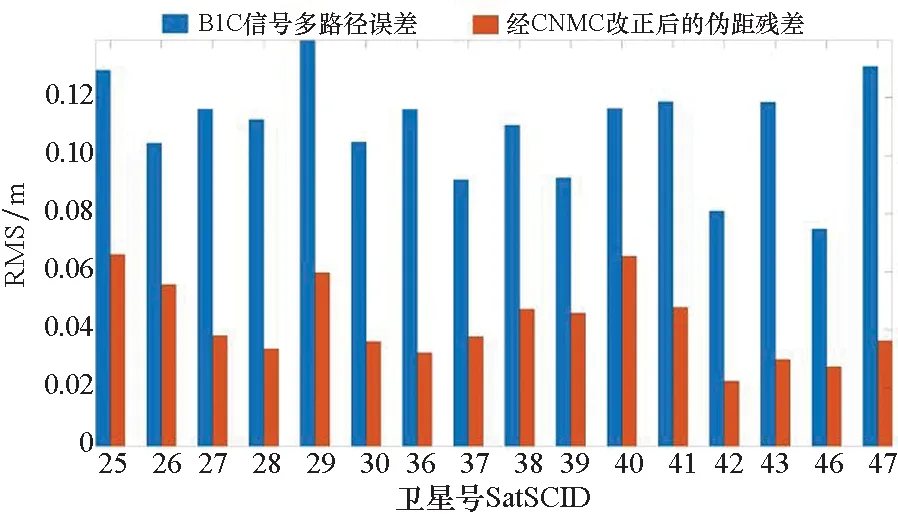
图3为30和39号卫星B1C频点伪距多路径结果。利用同样的方法,对B1I频点的伪距多路径误差进行计算和改正。图4为30号和39号卫星B1I频点伪距多路径结果。图5和图6为伪距残差的均方根误差(Root Mean Square, RMS)。
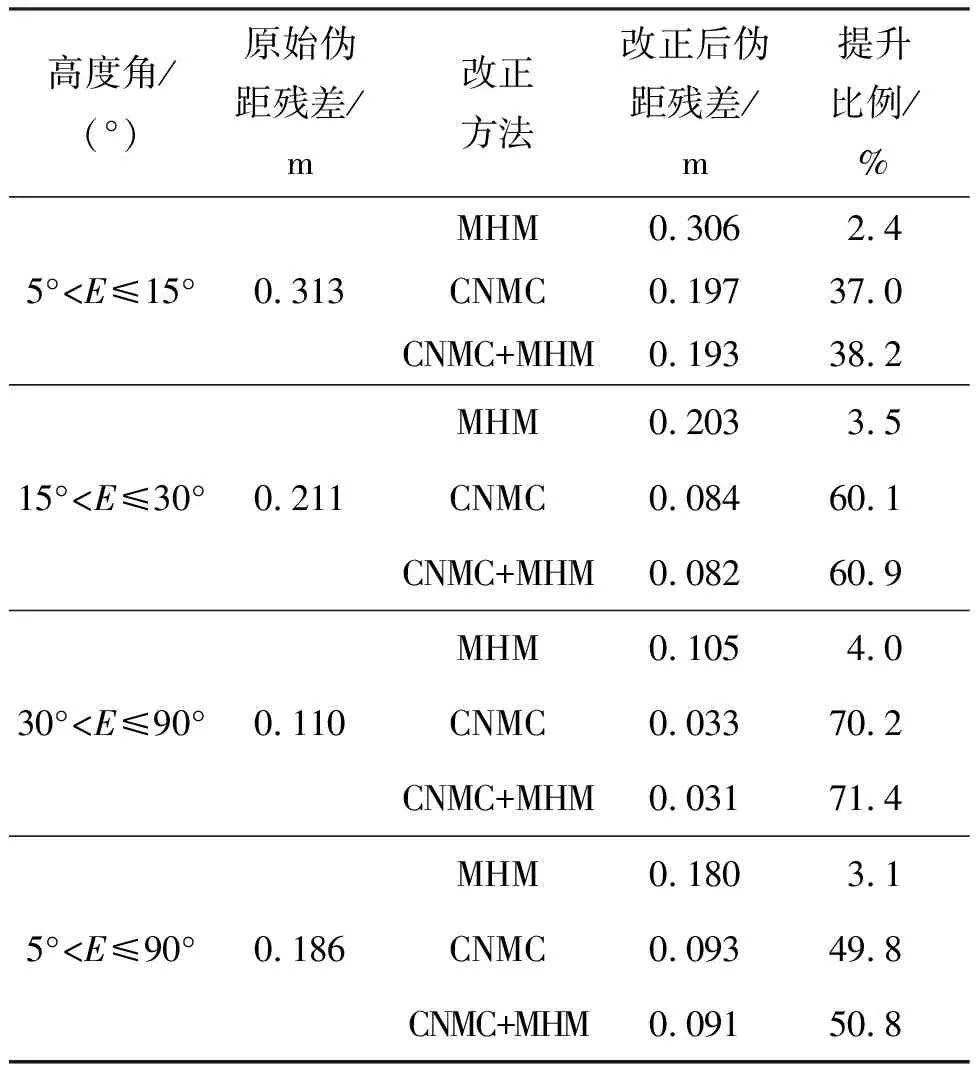
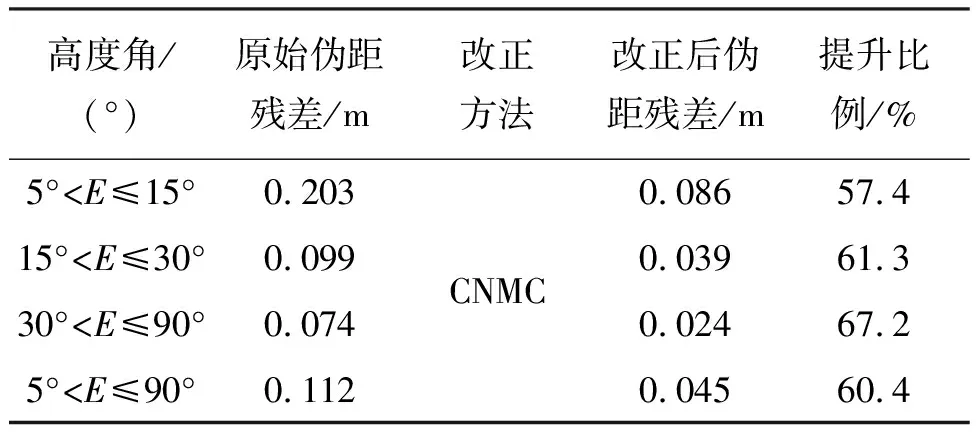
由图3、 图5和图4、图6可以得出,BDS-3 MEO卫星B1C和B1I频点伪距多路径误差在分米量级,是不可忽视的误差来源,其中E为卫星高度角。在不进行多路径误差改正时,高度角小于30°时,伪距残差在几十厘米。MHM方法对于伪距多路径误差的降低并不显著,更适合用于短基线高精度测量。CNMC方法对于伪距多路径误差改正效果十分明显,在高度角大于15°时,可以将伪距残差降低至厘米量级。B1C和B1I频点不同高度角伪距残差RMS统计结果分别如表1和表2所示。结合表1和表2分析,CNMC算法在高度角大于15°时可以将B1C和B1I频点伪距多路径误差减小60%以上,使伪距精度得到了大幅提升。同时经过改正的伪距数据,其伪距残差时间序列变得更加平稳。与BDS-2卫星B1I频点30 cm大小的伪距多路径值相比[14],BDS-3卫星B1I频点的伪距多路径误差减小60%以上。
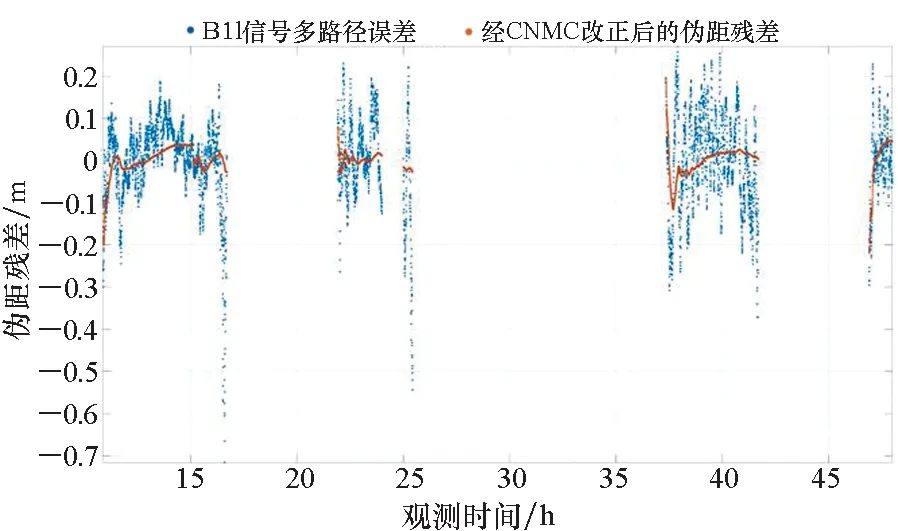
(a) 30号卫星B1I频点伪距残差随时间变化图(a) Figure of pseudorange residuals varies with time at B1I frequency of SATSCID 30
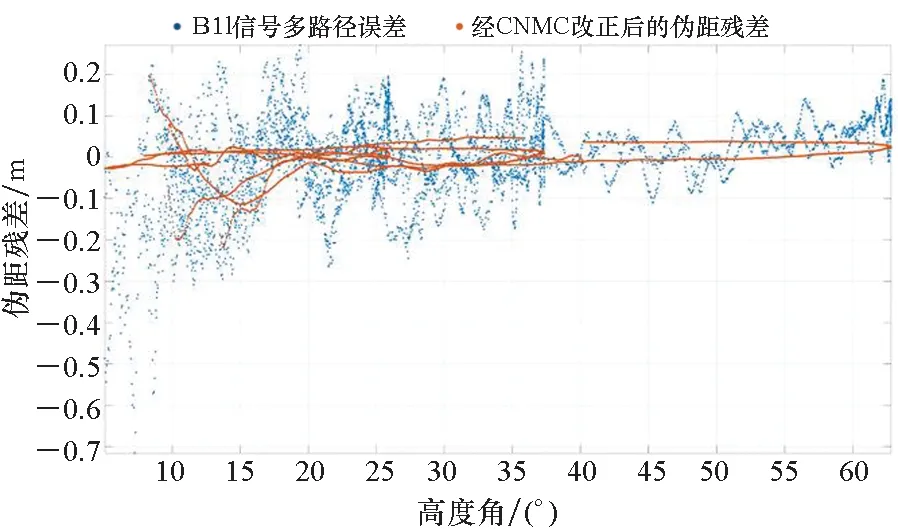
(b) 30号卫星B1I频点伪距残差随高度角变化图(b) Figure of pseudorange residuals varies with altitude at B1I frequency of SATSCID 30
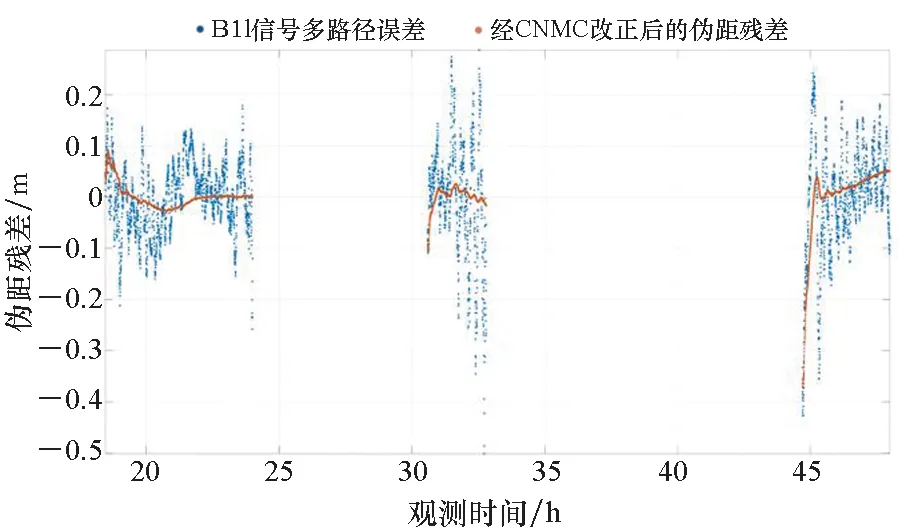
(c) 39号卫星B1I频点伪距残差随时间变化图(c) Figure of pseudorange residuals varies with time at B1I frequency of SATSCID 39

(d) 39号卫星B1I频点伪距残差随高度角变化图(d) Figure of pseudorange residuals varies with altitude at B1I frequency of SATSCID 39图4 30和39号卫星B1I频点伪距多路径结果Fig.4 Results of pseudorange multipath error at B1I frequency of SATSCID 30 and 39
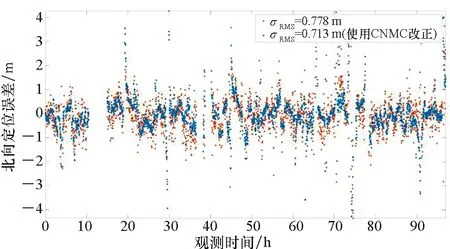
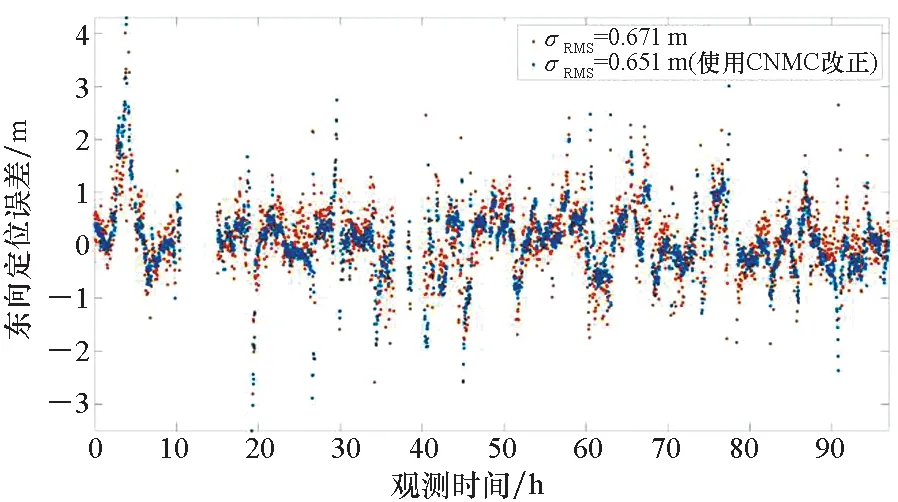
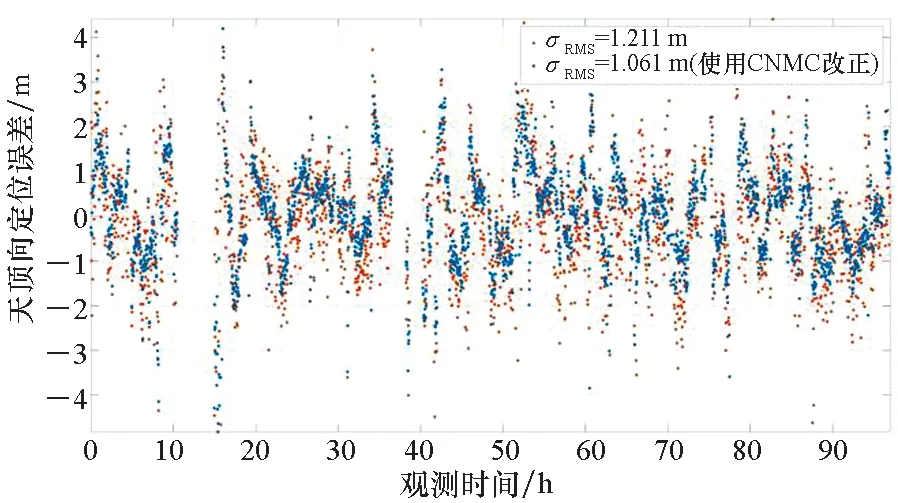
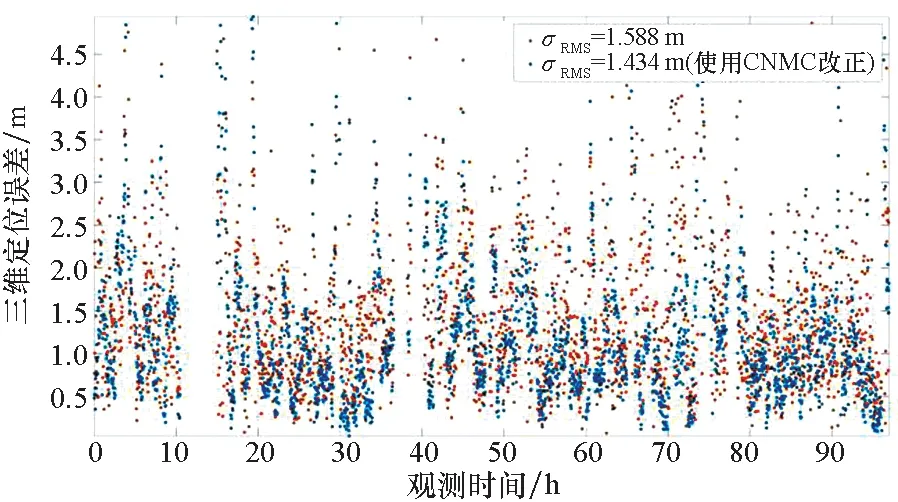
(a) 5° (b) 15° (c) 30° (d) 5° (a) 5° (b) 15° (c) 30° (d) 5° 表1 B1C频点不同高度角伪距残差RMS统计 表2 B1I频点不同高度角伪距残差RMS统计 图7为2019年5月25日至28日伪距定位误差结果,由图7可以得出,经过CNMC改正后可以使伪距定位精度提高约10%。 (a) 伪距北向定位误差(a) Pseudorange positioning error in the north direction (b) 伪距东向定位误差(b) Pseudorange positioning error in the east direction (c) 伪距天顶向定位误差(c) Pseudorange positioning error in the upward direction (d) 伪距三维定位误差(d) Pseudorange positioning error in three dimensions图7 2019年5月25日至28日伪距定位误差Fig.7 Pseudorange positioning error on May 25 to 28, 2019 为了改正BDS-3 MEO卫星伪距测量多路径误差,本文利用实测数据分析了伪距测量残差,MEO卫星在低高度角,即出入境时,伪距多路径误差十分明显,甚至可以达到米级。然后利用卫星在空域的重复性建立MHM模型,但是MHM模型对于伪距多路径误差的改正并不明显。同时利用CNMC算法对伪距观测量进行处理。实际数据分析表明,该算法在高度角大于30°时可以将B1C频点多路径误差水平从0.11 m降低至0.03 m,使B1I频点伪距多路径误差从0.074 m降低至0.024 m,使MEO卫星的B1C和B1I频点多路径误差降低了60%以上,使B1C频点伪距定位精度提高约10%。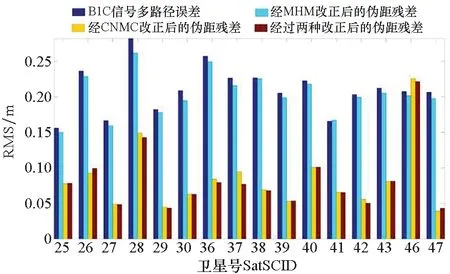

4 结论
