基于PLC 的工业机器人系统集成编程方法
2021-08-23李洪声郭铜民
李洪声 郭铜民 熊 彦
(陕西工商职业学院,陕西 西安 710119)
1 亚龙YL-1629A 型工业机器人产品分拣系统机构主要组成
1.1 供料机构单元
供料单元的基本功能:在整个系统中,起着向系统中的其它单元提供原料的作用。具体的功能是:设备启动后,落料检测传感器检测到有料时。顶料气缸伸出,推料气缸自动地把物料推出到输送带上,以便输送单元进行下一步动作。如图1 所示。
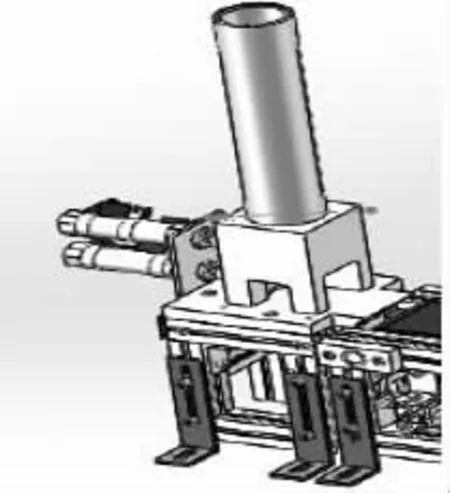
图1
1.2 直线输送带单元
直线输送单元的基本功能:在供料单元推料到输送带上后,电机启动且编码器开始计数。在经过输送带上的传感器时对物料的类别进行识别区分为下一步动作做准备,到达输送带末端时电机停止等待下一步动作。直线输送单元如图2 所示。

图2
1.3 气源气路部分
气源部分主要由一个油水分离器、四个电磁阀、两个气缸及机器人手抓、吸盘组成。通过油水分离器给整个气路部分的气压进行调节和供气,同时过滤空气中的水分使供气干燥避免损坏气动元件。通过若干气管对气路导通,连接到电磁阀的汇流板。再通过电磁阀,分别控制气动执行元件动作(顶料气缸及推料气缸以及机器人手抓、吸盘)。
2 亚龙YL-1629A 型工业机器人产品分拣系统工艺过程
当按下触屏电机上电及运行按钮(图3)后,传感器(表1:X6)进行落料检测,如果检测到有料,PLC 控制顶料气缸伸出顶料(Y1),顶料到位后(X3),推料气缸开始推料(Y0),推料到位后(X5),输送皮带电机开始转动(Y2),皮带输送机运送物料,当传送到终点(X7)机器人夹料位置时,皮带输送机停止,PLC 终点检测X7 信号触发机器人运动程序使机械手运行到夹料位置夹料,机器人程序依据安装在输送皮带上方金属与非金属传感器(X10、X22)检测结果,进行物料分拣。当皮带终点物料被取走后循环自动进行皮带输送供料机器人夹料。
3 主单元三菱PLC-FX3U、触摸屏、机器人主机信号信息传递关系
3.1 本设备配备触摸屏为MCGSTPC7062Ti,通过RS232 串口数据线和PLC 通讯。实现人机界面的数据交换,该触摸屏软件采用昆仑通态对其组态。三菱PLC 部分输入输出端口地址见表1。
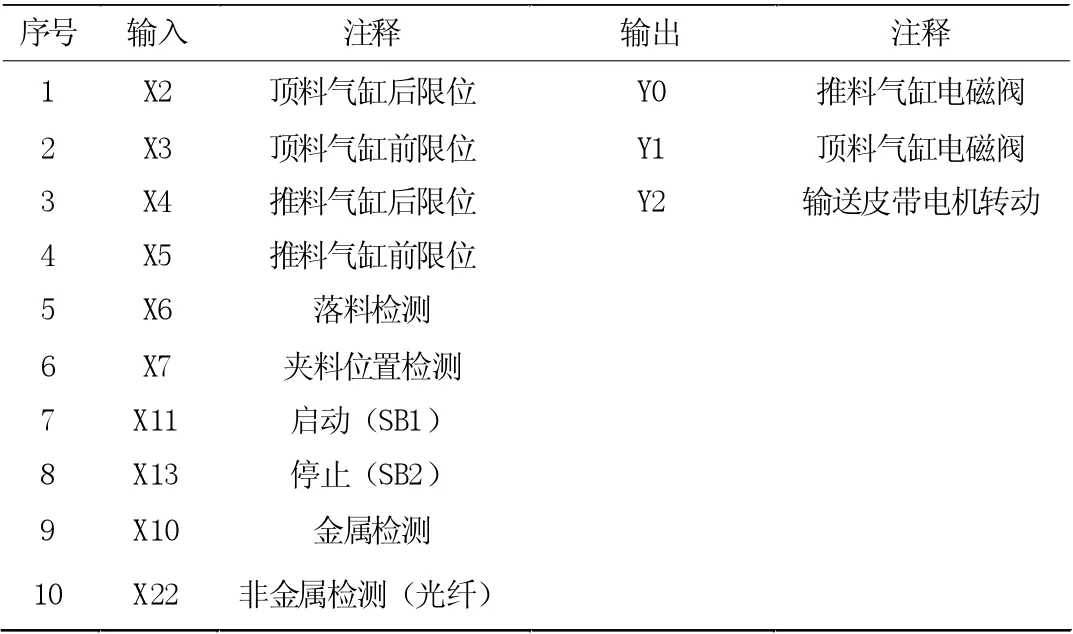
表1 三菱PLC-FX3U 部分输入输出地址
3.2 触屏界面图元与PLC 辅助中间软继电器M 关联
使用MCGSE 组态软件设计触屏界面如图3 所示,电机上电与电机下电按钮均控制机器人各轴电机上电与下电,运行按钮同时启动上料输送机及机器人运行;停止按钮同时停止上料输送机及机器人运行。在组态软件中电机上电按钮与PLC 软继电器M7 关联,见图4。
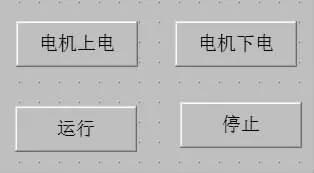
图3 触摸屏
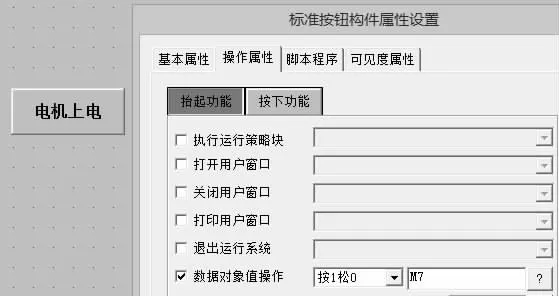
图4 上电图元与M7 关联
同理,电机下电、运行及停止图元按钮均与PLC 软继电器M 关联,见表2。
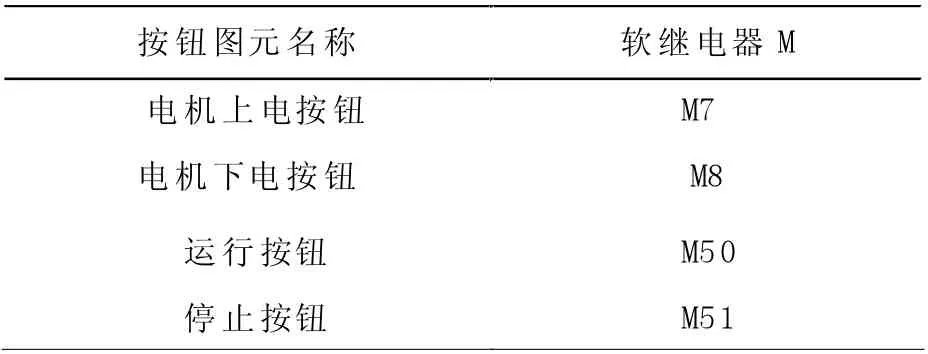
表2 按钮图元与PLC 软继电器M 关联对应关系
3.3 工业机器人的I/O 通信接口可以实现与周边设备(PLC)进行通信。通过定义机器人的I/O 板,定义机器人数字I/O 信号,将数字输入信号DI 与系统的控制信号关联起来,并通过编制与DI 连接的Y 输出PLC 程序就可以对系统信号进行控制,如:电机上电、电机下电、程序运行等;同时DI 信号也可以作为机器人程序触发条件,触发执行相应子程序或作为程序判别跳转条件。如表3 中、当DI3 为1 启动机器人抓料子程序;当DI2、DI8为1 时,作为调用金属与非金属分拣子程序的条件。本设备使用部分PLC 输出Y 端子与机器人DSQC651 标准I/O 板输入数字端子DI 连接及进行数字输入信号DI 与系统的控制信号关联,同时DI 可作为机器人程序触发条件见表3。

表3 PLC 输出Y 与机器人输入DI 对应连接及DI 与机器人系统控制信号对应关联关系
4 编制触摸屏按键及分拣控制PLC 程序
本文采用SFC 顺序功能图编制PLC 控制程序。根据表1、表2、表3 触摸屏按钮,PLC 辅助继电器M、输入输出地址与机器人数字输入量DI 之间的关联对应关系及上料工艺过程编制PLC 控制程序。
摸屏按键及电气面板PLC 程序。如图5。
4.1 触屏运行(M50)、停止(M51)按键,电气面板运行(X11)、停止(X1)按键PLC 控制部分梯形图程序见图5(梯形图块)、图6(自动上料SFC 块)。
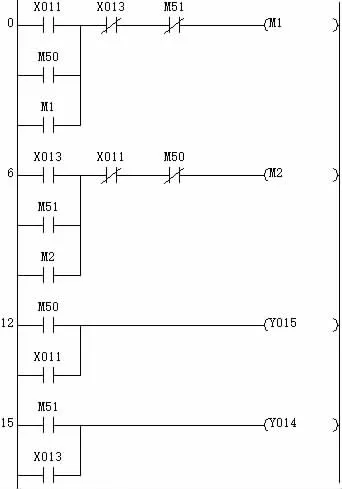
图5 梯形图块

图6 自动上料SFC 块
当按下触屏运行按钮时M50 闭合,软继电器线圈M1 置位,SFC 块中常开M1 闭合,当落料检测有料时,常开X6 闭合,顺序启动顶料、推料,皮带输送供料。由于M50 闭合时,Y15 置1,与Y15 连接的数字输入信号DI5 置1,启动机器人运行Start(表3)。同理,当按下电气面板启动按键(X11)时,落料检测有料时,常开X6 闭合,顺序启动顶料、推料,皮带输送供料,同时启动机器人系统运行控制信号Start。触屏与电气面板停止功能亦然。本编程方法自动供料及机器人运行停止均可通过触屏按钮及面板开关控制,使用灵活方便。
4.2 触屏电机上电、电机下电按键PLC 梯形图7。
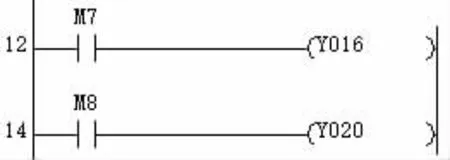
图7 电机上下电控制
机器人运行前必须进行上电、下电时停止运行。
触屏中按下电机上电按钮(M7),常开M7 闭合,Y16 置位,与Y16 连接的机器人数字输入信号DI6 置1,与DI6 关联的系统控制上电信号Motors On 执行(表3)电机上电;同理电机下电亦然。
4.3 金属与非金属分拣PLC 程序
本课题在SFC 块中编制分拣金属与非金属PLC 程序。传感器X10、X22 分别检测金属与非金属,Y12 与DI2 连接、DI2 作为判别金属启动机器人分拣金属子程序条件;Y21 与DI8 连接、DI8 作为判别非金属启动机器人分拣非金属子程序条件。图8为部分金属与非金属分拣PLC 程序。
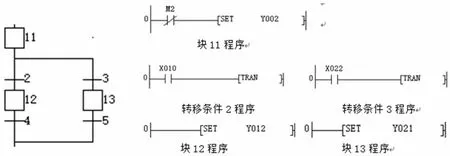
图8 金属与非金属分拣PLC 程序
分拣判别过程:自动上料运行后,皮带机运输物料,当输送的是金属材质时,传感器X10 闭合,选择分支程序运行块12 程序,Y12 置1、则数字输入信号DI2 置1,作为启动机器人抓取金属子程序条件;同理、当输送的是非金属材质时DI8 置1,作为启动机器人抓取非金属子程序条件。
4.4 机器人分拣判别语句
机器人主程序Main 中根据数字输入信号DI2(金属)DI8(非金属)的值调用相应的子程序。
调用金属分拣子程序语句为:IF DI2=1 Then jinshu(分拣金属子程序名)。
调用非金属分拣子程序语句为:IF DI8=1 Then feijinshu(分拣非金属子程序名)。
5 结论
本文针对亚龙YL-1629A 型工业机器人产品分拣系统要求,设计触摸屏界面、关联触摸屏、PLC、机器人信息传递相关量,采用SFC 顺序功能图编制PLC 分拣控制程序,编程方法可靠便捷,经上机运行满足分拣要求。
