多功能椰枣园作业平台设计与优化
2021-08-20张翠英仪垂良任冬梅王东岳王树城杨化伟马晓君卢绪振
张翠英,仪垂良,任冬梅,王东岳,王树城,杨化伟,马晓君,卢绪振
(250100 山东省 济南市 山东省农业机械科学研究院)
0 引言
椰枣被称为“沙漠面包”,主产区集中在中东和北非地区,一棵椰枣树的产量可以达到70~140 kg,产果期可达到100 年以上[1-2]。椰枣树高可达15~25 m,羽状叶长2~3 m,在整个椰枣主产区,椰枣生产机械几乎处于空白[3]。1990年,Al-Suhaibani 等人在《亚洲农业机械化》(Agricultural Mechanization in Asia)发表文章,研制了一种椰枣收获机械,这种机械包括一个四轮驱动底盘和一个电液控制的吊篮,柴油发动机驱动吊篮将工人提升到树上,工人站在吊篮里进行采摘作业[4]。近年来又出现一批振动式椰枣收获机,在椰枣未成熟之前套上网袋,待椰枣全部成熟后通过振动树干完成椰枣果实的收获[5-7]。目前的椰枣生产管理还是主要靠人力,劳动强度大且高空作业危险性大[8]。
为实现椰枣生产机械化,解放大量农业劳动力,促进椰枣产业的发展,进而提高椰枣产地人民的生活水平,山东省农业机械科学研究院与埃及国家研究中心合作研制了一种多功能椰枣园作业平台(如图1 所示),可作为果园机械化作业平台,配套专用作业部件实现果树剪枝、授粉、打药、采摘等多种作业。

图1 多功能椰枣园作业平台Fig.1 Multi-functional operation platform for date palm garden
1 结构与工作原理
本文设计的多功能椰枣园作业平台结构组成如图2 所示,包括拖车、支腿、座椅及操纵系统、立柱、主臂、作业装置和液压系统。
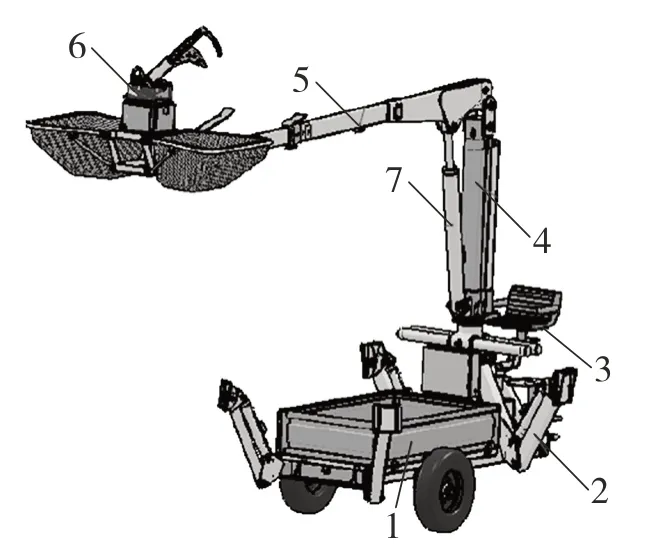
图2 多功能椰枣园作业平台结构Fig.2 Structure of multi-functional operation platform for date palm garden
拖车包括车架、底座、轮胎和货箱,拖车通过三点悬挂与拖拉机连接,能够由拖拉机带动行走,能够运输相关物资。支腿通过销轴与车架连接,并通过支腿油缸控制支撑高度,在作业平台工作时可以起到固定支撑作用,平台行走时收起支腿。立柱通过油缸可以上下升降,还可以360°旋转,与可以伸缩的主臂一起工作,扩大了作业范围。作业装置包括底座、剪切机构、回转机构、集果箱、电控装置,固定在主臂的顶端,作业人员只需要在座椅处操纵液压控制系统,便可以实现果树修剪、授粉或收获等工作,克服了人员高空作业带来的安全问题,提高了工作效率。
2 主要技术指标参数计算
根据调研总结出多功能椰枣园作业平台主要技术参数要求如表1 所示。
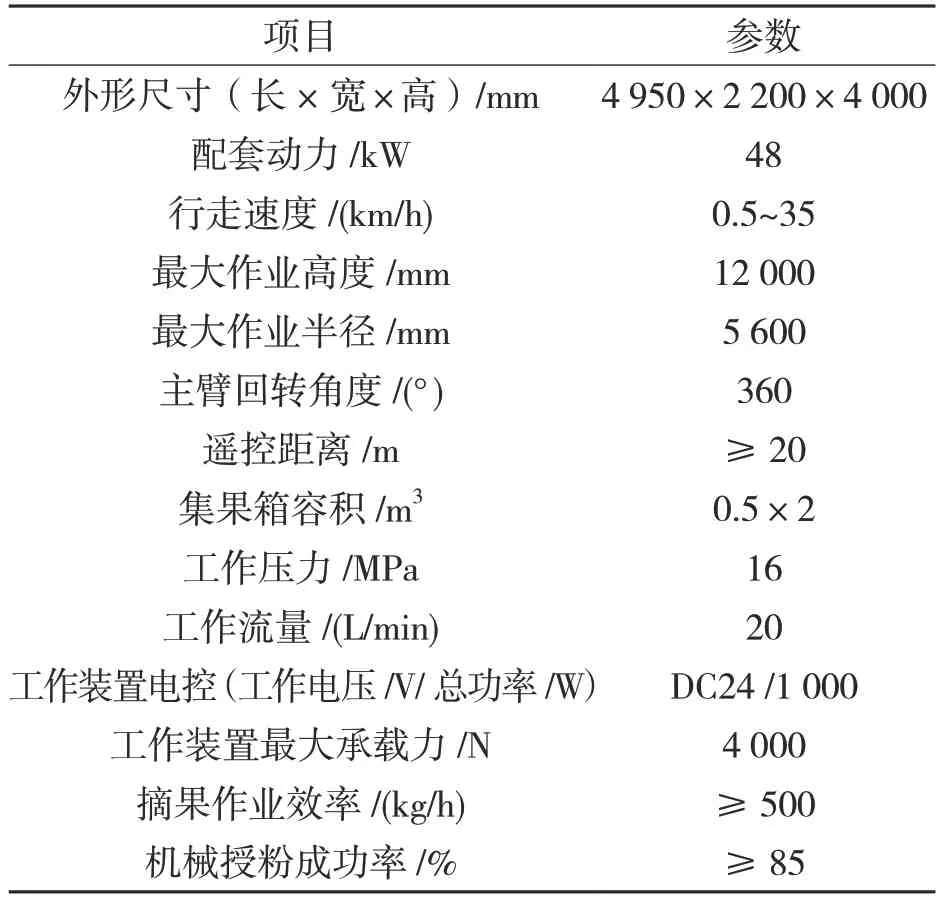
表1 多功能椰枣园作业平台主要技术指标Tab.1 Main technical parameters of multi-functional operation platform for date palm garden
由于大多椰枣树的盛产期为树高7~12 m,所以确定作业平台最大作业高度为12 m。外形尺寸是指运输状态时多功能椰枣园作业平台的尺寸,立柱升至最高,主臂伸至最长时的尺寸如图3 所示。最大作业半径R>O2D=5 600 mm,满足设计要求。各主要结构计算尺寸如图3 所示。
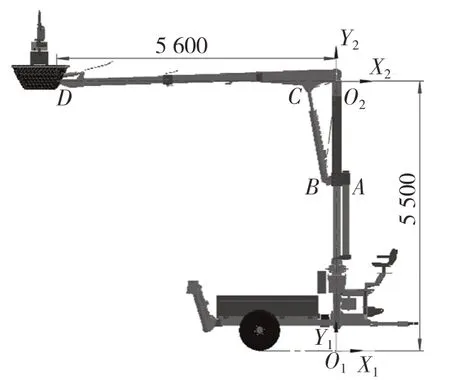
图3 技术指标计算示意图Fig.3 Schematic diagram of technical index calculation
为验算作业平台作业范围,可以利用齐次坐标变换法[9]表达主臂的运动。主臂回转角度为360°,旋转过程中只有立柱、主臂及主臂顶端的作业装置动作,所以回转角度内作业范围相同。以图3 所示角度进行求解,作业平台只有立柱下降和主臂绕销轴中心O2旋转两个运动。
建立两个坐标系,以地平线与立柱轴线交点O1为圆心建立固定坐标系1,以点O2为圆心建立运动坐标系2。
初始位置时,坐标系1 与坐标系2 具有相同的方位,主臂顶端D 点的在坐标系2 的描述为

立柱下降j 时,位置矢量为
立柱伸缩油缸的行程为1 350 mm,则

主臂绕销轴中心O2逆时针旋转θ时,旋转矩阵为
式(4)中,cθ=cosθ,sθ=sinθ。
主臂顶端D 点在坐标系1 中的运动轨迹为

将式(1)—式(3)代入式(4)可得
如图3 所示,∠DO2C 和在设计过程中已经确定,则主臂旋转角度θ的范围与∠BO2C 的变化范围一致。
结构设计中∠DO2C=16°,AB=230 mm,O2A=1 870 mm,O2C=560 mm,∠AO2B=arctan(AB/ O2A)=7°。

随着主臂旋转
式(8)中:BC——主臂油缸,长度范围为1 420~2 350 mm。代入式(8)得

根据右手定则,主臂绕销轴中心O2逆时针旋转为正,可求得主臂旋转角度θ的范围

将式(3)和式(11)代入式(6)得
所以主臂顶端D 点最大高度为10 909 mm,最小高度为508 mm。
作业装置顶端到主臂顶端D 点的垂直距离大于1 m,工作时支腿会使轮胎高于地面200 mm,所以,作业平台最大作业高度大于12 m,满足设计要求。
3 有限元分析
根据以上技术要求,完成了多功能椰枣园作业平台的初步结构设计。在整个作业平台中,有主臂与立柱组成的机械臂用于大范围内作业,长度和高度比较大,其强度可靠性尤为重要。利用SolidWorks 中的Simulation 模块,对主臂顶端D点离立柱最远、立柱升到最高的工况进行静应力分析,校核作业平台机械臂的机械强度。
将简化后的部件模型按照上述工况进行装配,启用Simulation,进行预处理[10]。
图4 中所有零件材料选择普通碳钢;8 对接触面设为无穿透相触面组;立柱转轴设为固定铰链,立柱底端平面设为固定夹具;机械臂工作装置销轴处加载方向垂直向下的力F1=4 000 N,重力G 方向如箭头所示。网格化时选择根据零件大小进行网格控制,达到网格相对精确的同时,尽量减少计算时间。
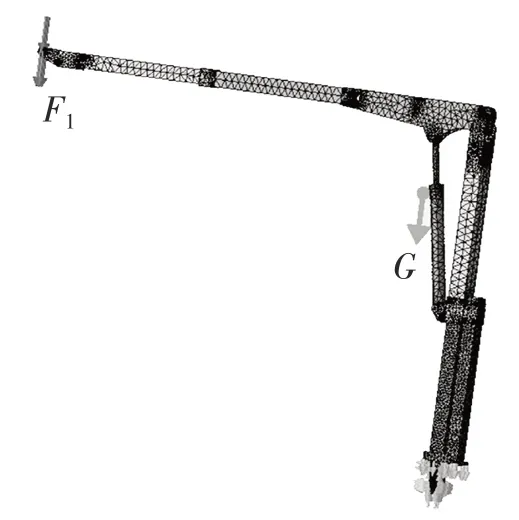
图4 机械臂有限元模型Fig.4 Finite element model of manipulator
利用Simulation 自动选配的求解器计算,结果分别如图5—图7 所示。
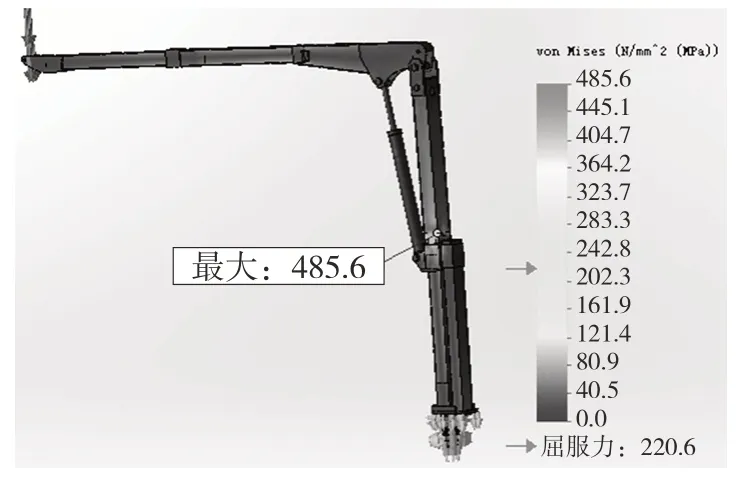
图5 机械臂应力云图Fig.5 Stress nephogram of manipulator

图6 机械臂应变云图Fig.6 Strain nephogram of manipulator
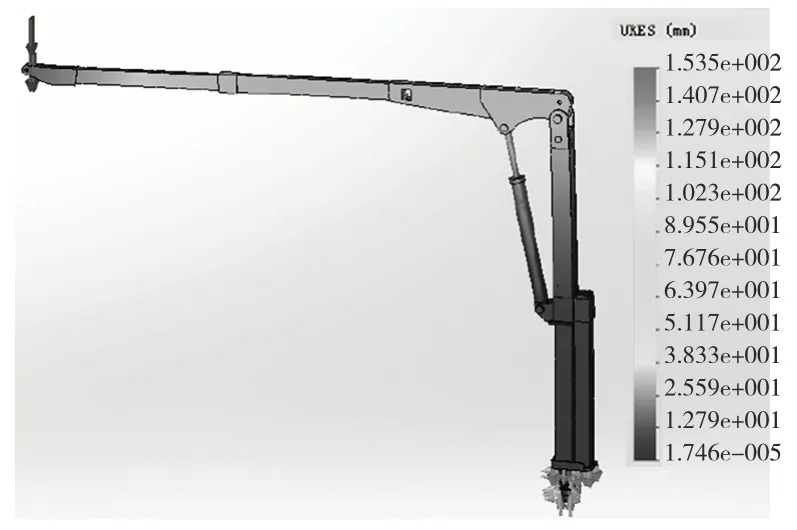
图7 机械臂变形(位移)云图Fig.7 Displacement nephogram of manipulator
机械臂大部分结构应力分布比较均匀,强度能够满足设计要求;但立柱部分应力太大,最大达到485.6 MPa,强度不能满足使用要求。同时,主臂变形较大,最大变形达到154 mm,刚度达不到使用要求,不仅影响了工作精度,还有可能会造成断裂破坏。
设置应力为ISO 剪裁显示,对危险截面进行放大观察。最大应力出现在立柱滑轨位置,如图8 所示。
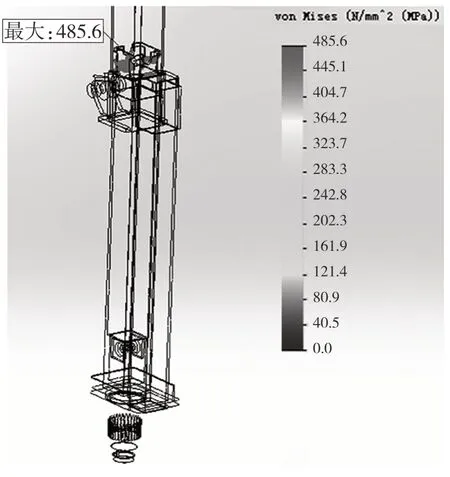
图8 机械臂危险截面应力云图Fig.8 Stress nephogram of dangerous section of manipulator
为减小危险截面应力,进一步优化了立柱滑轨处的结构。立柱内滑轨优化前后结构比较如图9 所示。
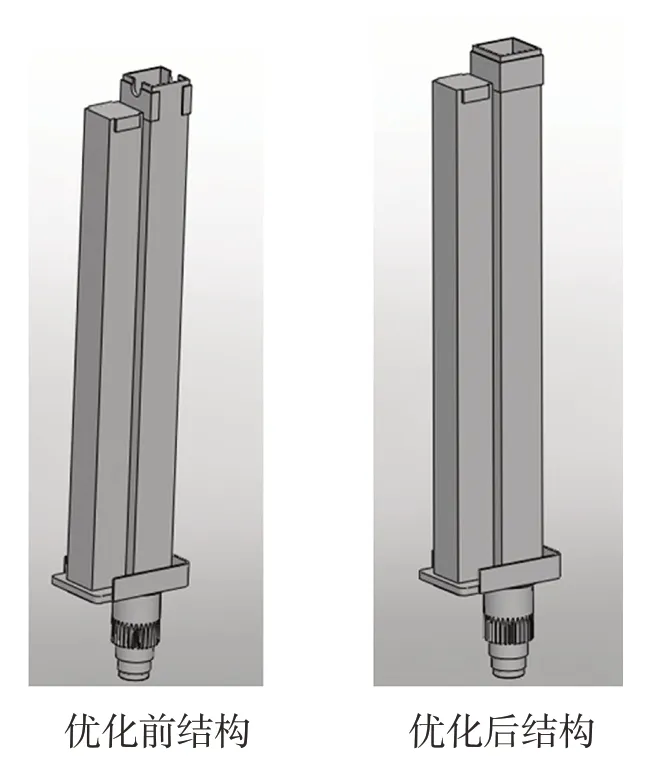
图9 立柱内滑轨优化Fig.9 Optimization of sliding rail in column
将优化后的部件模型重新装配,启用Simulation,进行预处理。预处理过程中,保持零件材料设置不变,相应接触面设为无穿透相触面组,夹具不变,加载力不变。网格化时依然选择根据零件大小进行网格控制,有限元模型如图10 所示。

图10 机械臂优化后有限元模型Fig.10 Finite element model of manipulator after optimization
利用Simulation 自动选配的求解器计算,结果分别如图11—图13 所示。
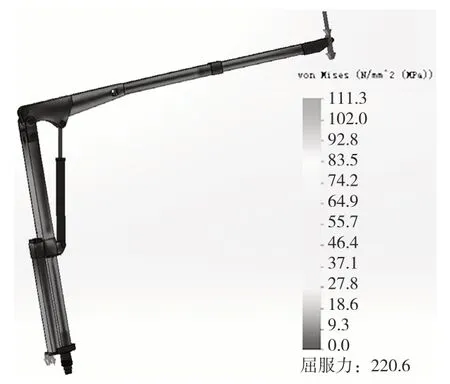
图11 机械臂优化后应力云图Fig.11 Stress nephogram of manipulator after optimization

图12 机械臂优化后应变云图Fig.12 Strain nephogram of manipulator after optimization
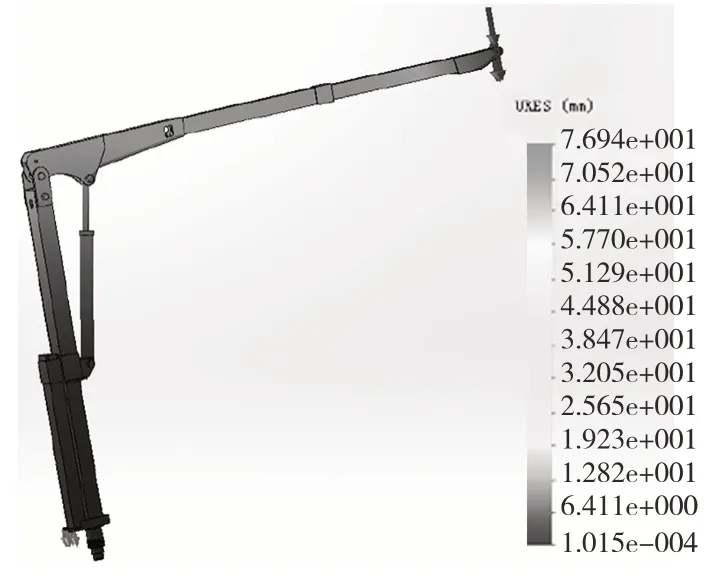
图13 机械臂优化后变形(位移)云图Fig.13 Displacement nephogram of manipulator after optimization
优化后的机械臂最大应力为111.3 MPa,各部件应力分布更为均匀,最大变形为77 mm,基本满足设计要求。
4 结果分析
机械臂主要使用普通碳钢,其屈服强度为σs=220.6 MPa,安全系数ns=σs/σmax。计算结果如表2 所示。
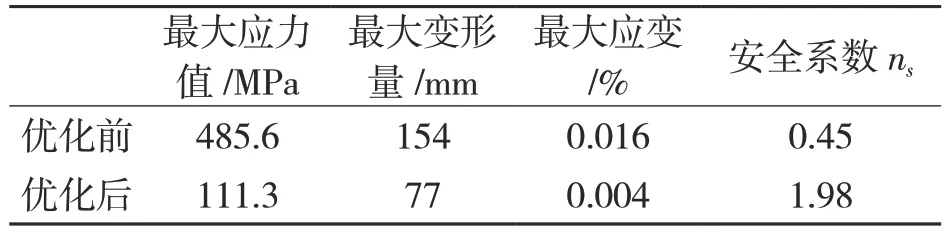
表2 计算结果Tab.2 Calculation result
优化后的机械臂最大应力比优化前降低374 MPa,最大变形比原来降低76 mm,安全系数能够满足设计要求。
5 结论
(1)确定了满足实际作业要求的多功能椰枣园作业平台主要技术参数,应用齐次坐标变换法验证了结构参数选择合理,完成了作业平台的初步设计。
(2)建立了多功能椰枣园作业平台机械臂的装配体力学模型,利用Simulation 进行了整机的有限元静应力分析,得出了应力云图、应变云图、变形云图。
(3)以有限元分析为依据,对机械臂进行了优化,经进一步有限元分析显示,优化后的结构的应力分布均匀,满足了材料强度和刚度要求。
(4)利用有限元分析能够有效地得出结构的强度可靠性,为以后的样机试验提供了基础数据。
